
simscape部分模块介绍
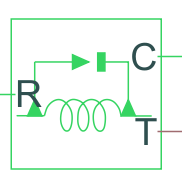
Ideal Torque Sensor
理想转矩传感器模块表征将流经传感器的变量转化为与扭矩成比例的控制信号的装置。该传感器之所以称为理想,是因为其建模过程未考虑惯性、摩擦、延迟及能耗等因素。
端口R与C均为机械旋转守恒端口。测量扭矩时需将该传感器与目标模块串联接入,因扭矩属于机械旋转领域的通变量。该传感器强制约束R端口与C端口之间保持零位移,若采用并联接入方式可能影响仿真结果——这等效于在连接点之间引入旁路支线。在既有线路上采用串联连接则既不影响仿真结果,又能实现精确测量。
端口T为输出测量结果的物理信号端口。模块正方向定义为从R端口指向C端口。这意味着施加于R端口(传感器正探极)的正向扭矩将产生正向输出信号。
机械接口:
R — 杆件(正极探针) 机械旋转 与传感器正极探针相关联的机械旋转守恒端口。
C — 外壳(基准探针) 机械旋转 与传感器负极(基准)探针相关联的机械旋转守恒端口。
物理输出:
T — 扭矩,单位:牛·米 (N*m) 物理量信号 扭矩物理量信号输出端口。
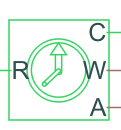
Ideal Rotational Motion Sensor
机械旋转系统中的运动传感器
物理信号输出接口:
W——角速度 (rad/s)
物理信号输出端口:角速度
类型: 物理信号
A——角位移 (rad)
物理信号输出端口:角位移
机械接口:
R——转轴(正向探头)
机械旋转
与传感器正向探头关联的机械旋转守恒端口
C——壳体(参考探头)
机械旋转
与传感器负向(参考)探头关联的机械旋转守恒端口
本文来自博客园,作者:cynety,转载请注明原文链接:https://www.cnblogs.com/connection0x00/p/18935706

 浙公网安备 33010602011771号
浙公网安备 33010602011771号