【图论】总结 12:二分图匹配
二分图
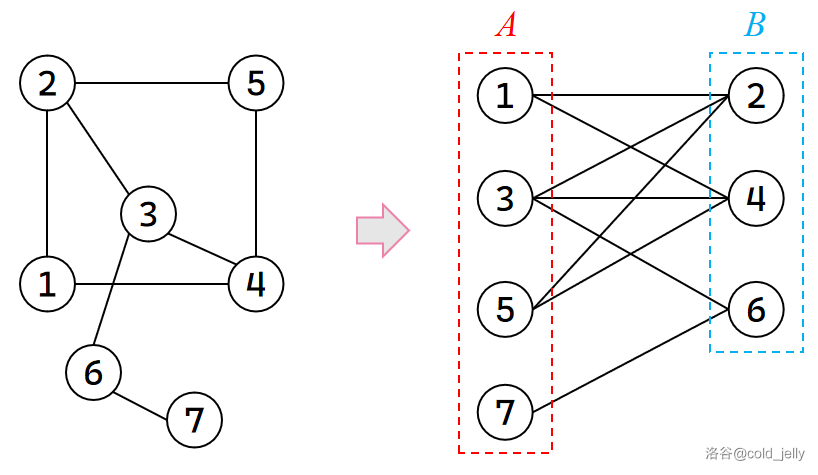
如果一张无向图 \(G=(V,E)\) 存在点集 \(A,B\),满足 \(|A|,|B|\ne \varnothing\) 且 \(A\cap B=\varnothing,A\cup B=V\),且不存在这样的边 \((u,v)\) 满足 \(u,v\in A(\text{or }u,v\in B)\),那么该无向图称为一张二分图。\(A\) 和 \(B\) 被称为二分图的左部和右部。
说人话就是如果能把一张图的所有点划分为两个非空点集,且同一集合之间的点无边相连,那么这样的无向图被称作二分图。
例如下面的图就是一张二分图:
二分图的判定
定理:一张图是二分图 \(\Leftrightarrow\) 图上不存在奇环 \(\Leftrightarrow\) 给图二染色的过程中不存在矛盾。
为判定奇环,我们采用染色法。算法流程如下:
- 所有节点初始无颜色;
- 从一个无颜色的节点 \(S\) 开始,将它染色为 \(col\)(\(col\in\{1,2\}\),表示白色或黑色);
- 从 \(S\) 出发跑 DFS,对于当前节点 \(u\),遍历它的相邻节点 \(v\);
- 如果 \(v\) 无颜色,则将 \(v\) 染成与 \(u\) 不同的颜色;如果 \(v\) 与 \(u\) 颜色不同,继续遍历即可;如果 \(v\) 与 \(u\) 的颜色相同,则证明该图不是二分图。
时间复杂度为 \(O(n+m)\)。
const int N = _______, M = _______;
int color[N];//默认无颜色时为 0
bool dfs(int u, int col)
{
color[u] = col;
for(auto v : e[u])
{
if(color[v] == color[u]) return false;
if(!color[v] && !dfs(v, 3 - color[u])) return false;
}
return true;
}
二分图最大匹配
对于图 \(G=(V,E)\),如果边集 \(E'\) 是 \(E\) 的子集,且满足该边集中任意两条边都没有公共端点,那么我们称 \(E'\) 为图 \(G\) 的一组匹配。对于二分图,使得 \(|E'|\) 最大的一组匹配称为二分图的最大匹配。
对于一组匹配 \(E'\),我们称属于 \(E'\) 的边为匹配边,不属于 \(E'\) 的边为非匹配边。所有匹配边的端点称为匹配点,其余的点称为非匹配点。
在二分图中,如果存在一条路径 \(path\) 连接两个非匹配点,并使得非匹配边与匹配边在 \(path\) 上交替出现,那么称 \(path\) 为匹配 \(E'\) 的一条增广路。
增广路有如下性质:
- 增广路的长度 \(L\) 为奇数(这里的长度指边数);
- 给路径上的所有边编号 \(1\sim L\),其中奇数序号的为非匹配边,偶数序号的为匹配边。
定理:二分图的一组匹配 \(E'\) 是最大匹配,当且仅当图中不存在 \(E'\) 的增广路。
证明考虑反证法。假设 \(E'\) 是最大匹配且存在增广路 \(path\),记 \(path\) 的长度为 \(L\),那么编号为偶数的边 \(2,4,6,\dots,L-1\) 组成 \(E'\)。此时显然有边集 \(E''=\{1,3,5,\dots,L\}\) 也是原图的一个匹配,发现 \(|E''|=|E'|+1\),与 \(E'\) 是最大匹配矛盾,故得证。
如何求一张二分图的最大匹配呢?我们采用匈牙利算法。
匈牙利算法的大致流程如下(我们记 \(E'\) 为现阶段求得的最大匹配):
- 初始时所有边都不是匹配边,\(E'=\varnothing\);
- 枚举二分图左部上的点 \(u\in A\),并给 \(u\) 寻找与其有连边的右部点 \(v\in B\),当 \(v\) 为非匹配点或者 \(v\) 已与另一个 \(u'\in A\) 匹配,但 \(u'\) 还能找到其它的 \(v'\in B\) 与其匹配时,我们称其匹配成功(即找到了增广路);
- 重复第二步,直到找不到增广路。
我们用一个例子来解释匈牙利算法的流程。假设对于下面这张二分图,我们要求它的最大匹配:
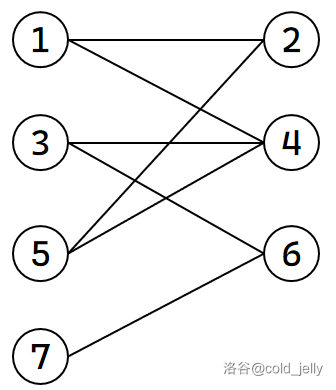
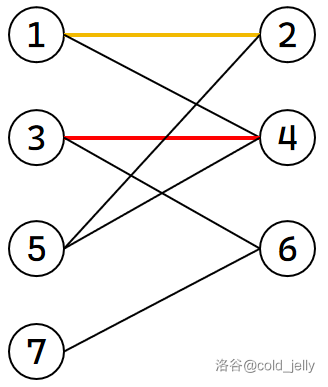
我们遍历左部节点,首先给 \(1\) 匹配 \(2\) 号节点:
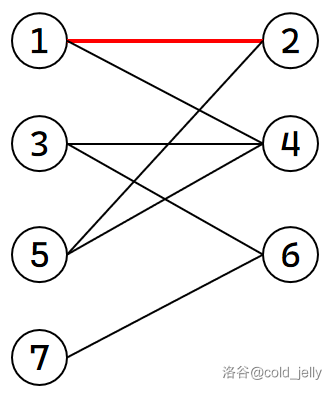
然后给 \(3\) 匹配 \(4\) 号节点:
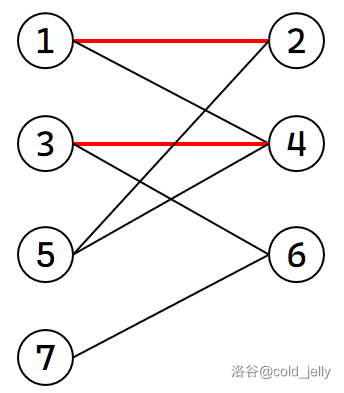
我们现在要给 \(5\) 号匹配了,但是与 \(5\) 号节点相连的 \(2\) 号和 \(4\) 号都已匹配,我们就考虑尝试给 \(1\) 号节点找其它的匹配对象(下图中黄色边表示临时拆开匹配):
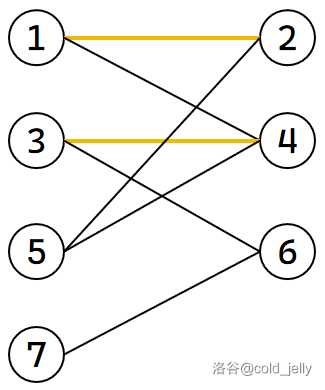
但是与 \(1\) 号节点相连的剩下的节点 \(4\) 也已与 \(3\) 匹配,那么我们尝试给 \(3\) 再找新的匹配对象:
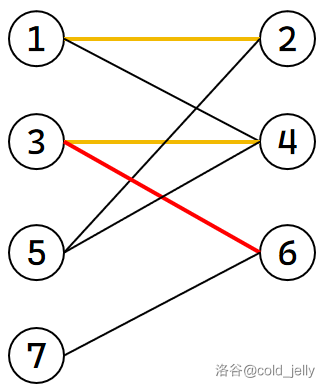
我们发现 \(3\) 还可以与 \(6\) 匹配,我们把它们匹配上:
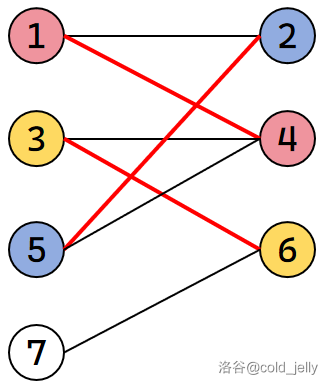
然后我们回溯再将 \(1\) 与 \(4\) 匹配,\(5\) 与 \(2\) 匹配:
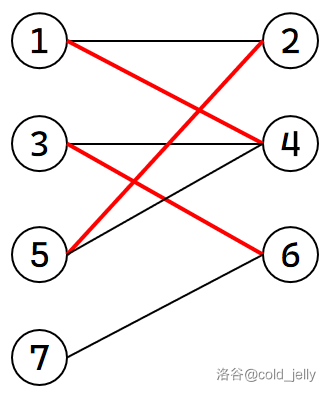
接下来我们遍历到 \(7\),很遗憾我们并不能再腾出一个位置给它匹配了。我们最终求得的最大匹配即为:
我们写出匈牙利算法的模板:
bool st[N];//记录节点 i 在试图改变匹配时成功与否
int match[N];//记录左部节点 i 的匹配对象
bool Hungary(int u)//匈牙利算法
{
for(auto v : e[u])
{
if(!st[v])
{
st[v] = true;
if(!match[v] || Hungary(match(v)))
{
match[u] = v;
return true;
}
}
}
return false;
}
int main()
{
int ans = 0;//最大匹配数
for(int i = 1; i <= n; i ++)
{
memset(st, false, sizeof st);
if(Hungary(i)) ans ++;
}
}
代码如下:
#include<bits/stdc++.h>
using namespace std;
const int N = 1e3 + 10, M = 1e5 + 10;
int n, m, E, ans = 0;
vector<int> e[N];
bool st[N];
int match[N];
bool Hungary(int u)
{
for(auto v : e[u])
{
if(!st[v])
{
st[v] = true;
if(!match[v] || Hungary(match[v]))
{
match[v] = u;
return true;
}
}
}
return false;
}
int main()
{
cin >> n >> m >> E;
for(int i = 1; i <= E; i ++)
{
int u, v;
scanf("%d%d", &u, &v);
e[u].push_back(v + n);
}
for(int i = 1; i <= n; i ++)
{
memset(st, false, sizeof st);
if(Hungary(i)) ans ++;
}
cout << ans;
return 0;
}
二分图完美匹配
对于一张含有偶数个点的二分图(假定节点数为 \(n\)),若其左部与右部的节点数均为 \(\dfrac{n}{2}\),且该二分图的最大匹配数为 \(\dfrac{n}{2}\),那么我们称这个二分图具有完美匹配。
完美匹配的判定是好做的,而求二分图的完美匹配的方法与求最大匹配相同。
多重匹配问题
在一张二分图 \(G=(V,E)\) 中,设左部为 \(A\)、右部为 \(B\),现在我们要从中选尽可能多的边,满足第 \(i\) 个左部节点至多选 \(el_i\) 条出边与右部节点相连、第 \(j\) 个右部节点至多选 \(er_i\) 条出边与左部节点相连。我们把这种问题称作二分图的多重匹配问题。
不难发现,当 \(\forall i,j,\text{st. }el_i=er_j=1\) 时,问题转变成了二分图最大匹配问题。
根据这种问题之间的联系,我们可以用拆点的方法求解多重匹配问题。具体而言,我们把第 \(i\) 个节点 \(u\) 拆分成 \(el_i\) 个不同的左部节点,把第 \(j\) 个节点 \(v\) 拆分成 \(er_j\) 个不同的右部节点。然后对于原图中的边 \((u,v)\),我们将拆点后的每个左部节点与右部节点连边。这样我们就将多重匹配问题转化为了一般的最大匹配问题。
例题:P10936 导弹防御塔。
我们发现我们可以二分时间,判定当前时间 \(mid\) 内能否击退所有入侵者。
此外,由于一个防御塔可对应多个入侵者,所以这是一个多重匹配问题,我们考虑将一个防御塔拆成若干点。发现在已知 \(mid\) 和 \(T_1,T_2\) 后,我们可求得在 \(mid\) 分钟内防御塔可发射的导弹数量 \(p=\dfrac{mid+T_2}{T_1+T_2}\)。然后我们就可以将一个防御塔拆成 \(p\) 个点,连边后跑匈牙利算法即可。
#include<bits/stdc++.h>
using namespace std;
const int N = 1e4 + 10, M = 1e6 + 10;
const double eps = 1e-7;
int n, m;
double T1, T2, V;
double l = 0, r = 1e9;
struct Point
{
double x, y;
}defend[N], attack[N];//防御塔和入侵者
bool st[N];
int match[N];
int h[N], e[M], ne[M], ide;
inline void add(int u, int v)
{
e[ide] = v, ne[ide] = h[u], h[u] = ide ++;
}
bool Hungary(int u)
{
for(int i = h[u]; ~i; i = ne[i])
{
int v = e[i];
if(!st[v])
{
st[v] = true;
if(!match[v] || Hungary(match[v]))
{
match[v] = u;
return true;
}
}
}
return false;
}
//第 i 个入侵者和第 j 个防御塔的距离
inline double dist(int i, int j)
{
double deltax = attack[i].x - defend[j].x;
double deltay = attack[i].y - defend[j].y;
return sqrt(deltax * deltax + deltay * deltay);
}
void build(double x)//建边
{
int p = max(0, (int)floor((x + T2) / (T1 + T2)));
p = min(m, p);
for(int i = 1; i <= m; i ++)
{
for(int j = 1; j <= n; j ++)
{
for(int k = 1; k <= p; k ++)//拆点
{
double T = dist(i, j) / V;
T += (k - 1) * 1.0 * (T1 + T2) + T1;
if(T > x) continue;
int u = i, v = m + (j - 1) * p + k;
add(u, v), add(v, u);
}
}
}
}
bool check(double x)
{
memset(match, 0, sizeof match);
memset(h, -1, sizeof h);
ide = 0;
build(x);
for(int i = 1; i <= m; i ++)
{
memset(st, false, sizeof st);
if(!Hungary(i)) return false;
}
return true;
}
int main()
{
cin >> n >> m >> T1 >> T2 >> V;
T1 /= 60;//转为分钟
for(int i = 1; i <= m; i ++)
scanf("%lf%lf", &attack[i].x, &attack[i].y);
for(int i = 1; i <= n; i ++)
scanf("%lf%lf", &defend[i].x, &defend[i].y);
while(r - l > eps)
{
double mid = (l + r) / 2;
if(check(mid)) r = mid;
else l = mid;
}
printf("%.6lf", l);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号