

今日:
1.早上去出版社买了新通信原理,真贵,去上工程伦理,事真多。
2.中午去课题组放东西吃饭,看到同学和张老师聊,挺不容易的;回来看了看守望先锋更新还挺有意思,下午准备邮寄、办卡、读综述、帮师姐改图。
*3DGS on Reconstruction:
1.三维重建的发展:SfM —— MVS —— NeRF —— 3DGS
NeRF阶段:
提高渲染效率、优化稀疏角合成、增强渲染质量、优化动态场景等
①提升渲染质量:优化模型训练过程,改进网络架构,细化特征表示,增强光照模型。
②提升渲染效率:优化数据结构,减少冗余存储,递归渲染方法,模型压缩,自适应采样。
③稀疏视图合成。
④动态场景优化:较高的自适应性和实时渲染能力。
3DGS阶段:实时渲染。过程包括高斯初始化、稠密化、投影和微栅格化。
增强实时渲染质量、优化稀疏视图数据重建、改善渲染细节、处理动态场景变化等
①提升渲染质量:多尺度多层次策略,优化高斯分布和其参数设置。
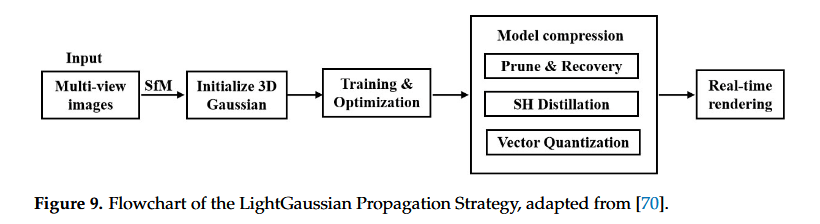
②提升渲染效率:优化存储策略以减少内存占用(EAGLES、LightGaussian),提高模型训练和渲染速度以提升性能。
③稀疏视图合成:结合深度估计模型或深度先验,结合其他先验。
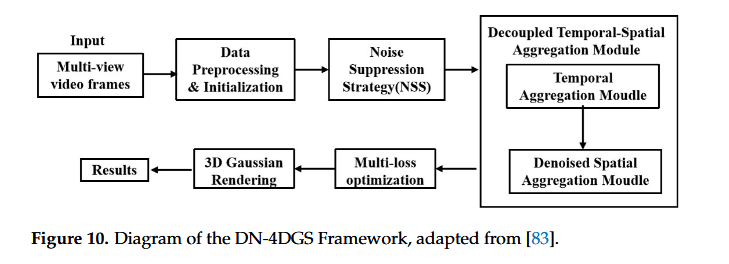
④动态场景重建(将动态场景表示为3D高斯集合或动态3D高斯粒子,利用高斯模型来捕获和表示场景中的运动细节):动态场景语义理解,低延迟高频率更新,4DGS
In recent years, 3DGS technology has made groundbreaking progress in several cutting-edge fields, particularly in autonomous driving, large-scale scene reconstruction, Simultaneous Localization and Mapping (SLAM) technologies, and 3D editing.
领域:自动驾驶,大场景重建,同步定位与建图(SLAM),3D编辑
局限:大规模场景中高斯球占用较高的storage和memory,依据于初始SfM计算精度
发展方向:增强三维重建技术的鲁棒性,降低计算复杂度,扩展其适用性,以应对动态场景、快速反馈和计算效率
①输入数据质量和数量的高要求,以及对SfM等特定技术的严重依赖:使用多模态数据融合来获得高质量的初始数据,以提高重建的鲁棒性和泛化性,并减少对外部工具的依赖。
②降低计算复杂度和提高处理速度:探索更高效的网络结构和算法。
③提升泛化能力:结合应用场景
④学科融合:深度学习、计算机视觉、传感器技术等,例如结合diffusion生成、结合多视角深度估计提高遮挡等


 浙公网安备 33010602011771号
浙公网安备 33010602011771号