基于stm32单片机家庭环境监测系统
1.演示视频
基于stm32单片机家庭环境监测系统视频演示_哔哩哔哩_bilibili
2. 项目介绍
本项目基于STM32F103C8T6最小系统板,打造了一个功能强大、显示直观的家庭环境监测系统。系统集成了温湿度、光照强度、多种气体、人体感应等传感器,并通过OLED屏幕本地实时显示数据,同时支持手机蓝牙小程序远程监控与告警。它不仅是一个全面的环境数据采集站,更是一个具备布防/撤防功能的简易家庭安防系统。
3. 系统功能亮点
- 环境多参数监测:实时采集温度、湿度、光照强度、空气质量(CO/CO2/烟雾等综合指标)。
- 人体红外感应:检测指定区域内是否有人体活动。
- 双模远程通信:支持ESP32 Wi-Fi模块(预留扩展接口)和HC-05/06蓝牙模块与手机连接。
- 手机小程序监控:通过自开发的微信小程序,可远程查看所有传感器数据,并进行系统控制。
- 智能安防布防:具备“布防”和“撤防”两种模式。在布防模式下,检测到人体入侵将触发本地蜂鸣器高声警报并推送手机提醒。
- 交互与提示:配备四个功能按键和一个蜂鸣器,方便本地操作和声音提示。
4.硬件设计
4.1 硬件组成 (BOM List)
| 模块名称 | 型号/规格 | 通信协议 | 功能 |
|---|---|---|---|
| 主控芯片 | STM32F103C8T6 (最小系统板) | - | 系统核心,负责数据处理与逻辑控制 |
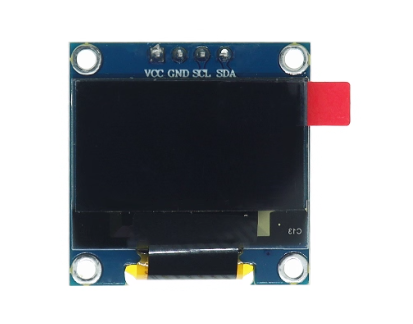
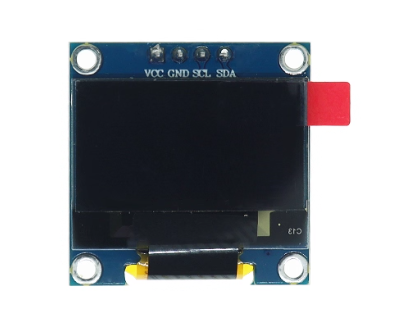
| 显示模块 | 0.96英寸 OLED屏 | I2C | 本地实时显示所有传感器数据及系统状态 |
| 温湿度传感器 | AHT20 | I2C | 高精度测量环境温度和湿度 |
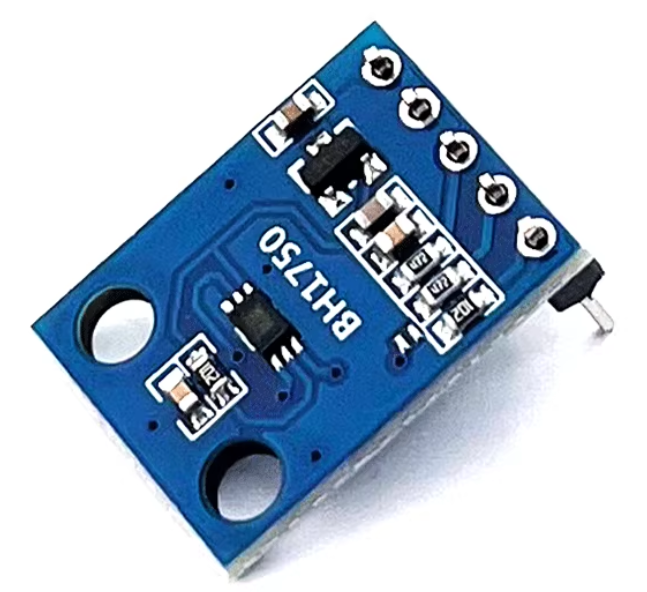
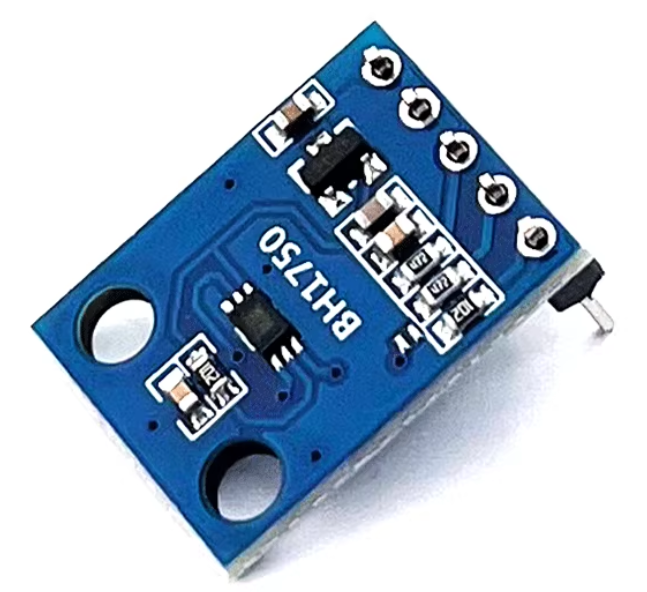
| 光照传感器 | GY-30 (BH1750) | I2C | 检测环境光照强度 (Lux) |
| 气体传感器 | MQ-135 | 模拟/数字 | 综合检测空气质量、CO2、CO、烟雾、苯等有害气体 |
| 人体红外传感器 | HC-SR501 | 数字GPIO | 检测人体移动 |
| 蓝牙模块 | HC-05 或 HC-06 | UART | 与手机小程序进行串口蓝牙通信 |
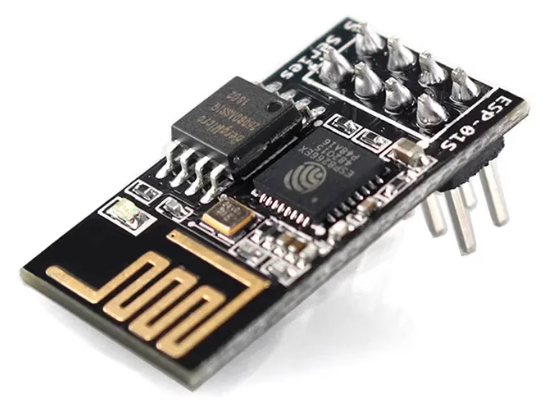
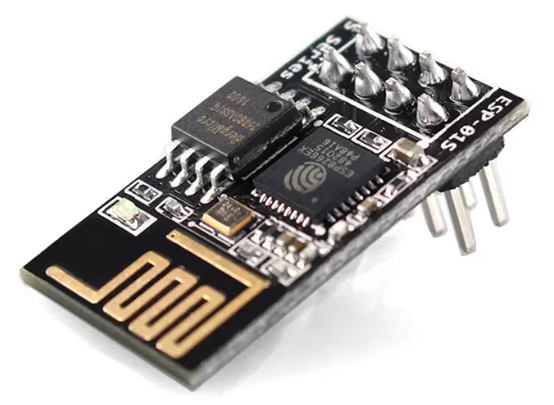
| Wi-Fi模块 | ESP-01S (ESP8266) 或 ESP32 | UART | 预留物联网扩展接口,可接入云平台 |
| 声学提示 | 有源蜂鸣器 | GPIO | 发出警报和提示音 |
| 输入控制 | 4x轻触按键 | GPIO | 本地切换模式、设置参数等 |
| 供电接口 | Type-C | - | 5V供电,并配有电源开关 |
4.2主要芯片介绍
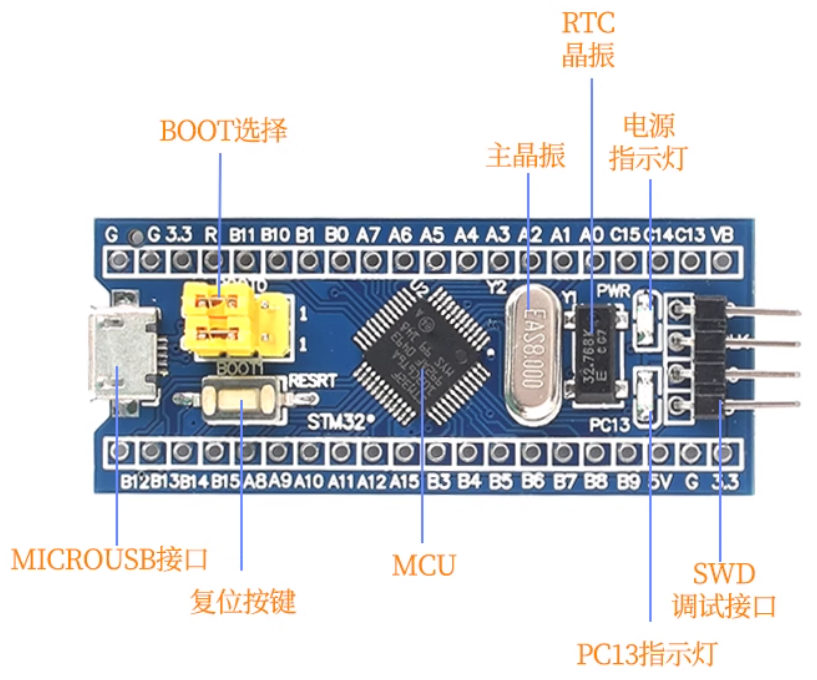
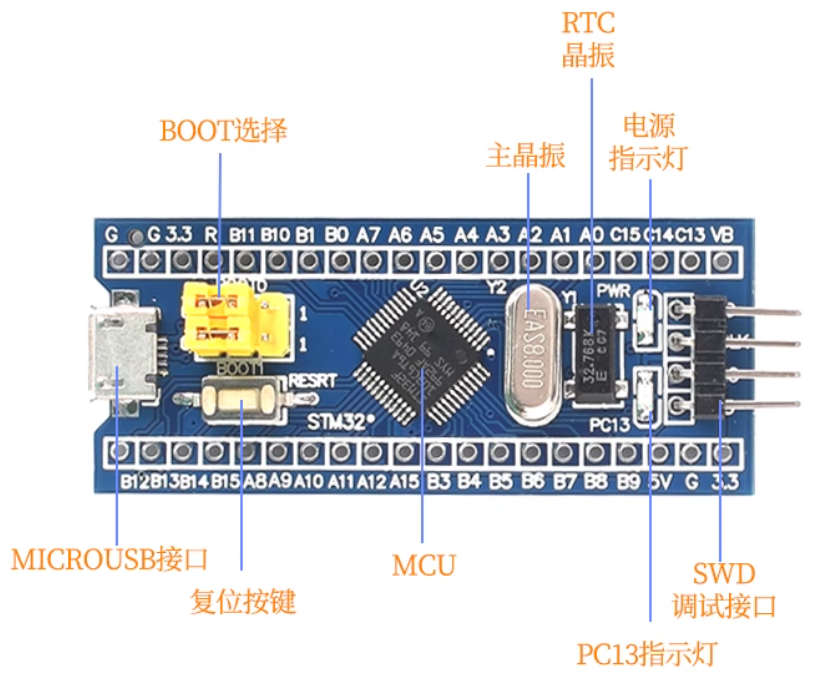
STM32F103C8T6介绍
STM32F103C8T6是一款由意法半导体公司(ST)推出的基于Cortex-M3内核的32位微控制器,硬件采用LQFP48封装,属于ST公司微控制器中的STM32系列。
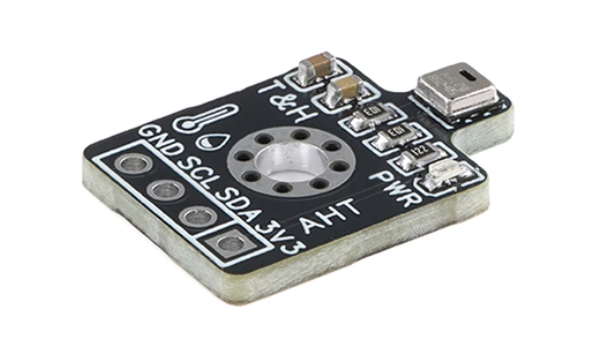
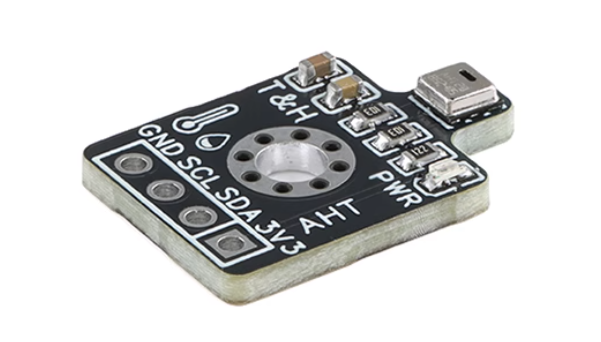
AHT20温湿度传感器介绍
AHT20是一款高精度数字温湿度传感器,采用I2C通信(地址0x38),供电需3.3V。其温度精度±0.3℃,湿度精度±2%RH,出厂已校准,即插即用。相比DHT11,精度更高、通信更稳定,是环境监测项目的理想选择。
BH1750光照强度传感器介绍
BH1750FVI 是一款数字式环境光强度传感器。它通过 I2C 接口直接输出光照度值(单位:Lux),测量范围 1 - 65535 lx。具有高精度、无需外部元件等优点,是替代光敏电阻的理想选择,广泛应用于自动背光调节和智能照明系统。
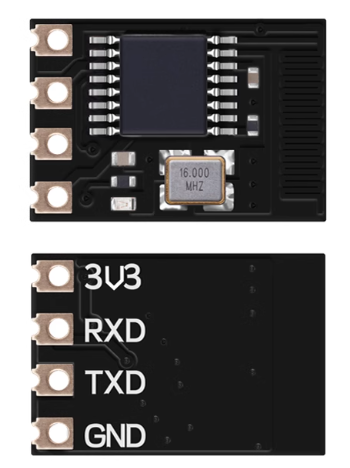
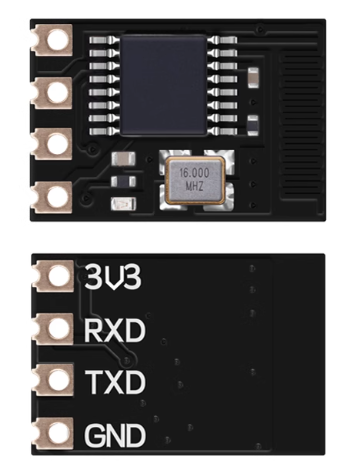
ECB01H2S蓝牙模块介绍
ECB01H2S 是一款基于蓝牙5.0的串口透传模块。它将复杂的蓝牙协议封装成简单的串口通信,用户只需通过AT指令进行配置,即可让主控设备(如STM32)通过串口与手机等蓝牙主机实现无线数据双向传输,极大简化了无线通信功能的开发流程,广泛应用于智能硬件和数据传输项目。
I2C OLED显示屏介绍
该屏幕拥有128x64高分辨率,采用I2C接口,仅需两根信号线即可驱动。其像素点自发光,显示黑色时功耗极低,无需背光,视觉效果清晰锐利,对比度高,是嵌入式项目中最受欢迎的小型显示方案。
ESP8266WiFi模块介绍
ESP8266 是一款低成本、高性能的Wi-Fi SOC芯片模块。其核心功能是通过串口AT指令与单片机通信,轻松实现设备联网。它内置了TCP/IP协议栈,可作为独立MCU或Wi-Fi适配器使用,是物联网项目中实现无线连接最经典、性价比最高的解决方案之一。
5.系统设计与实现
5.1整体系统设计
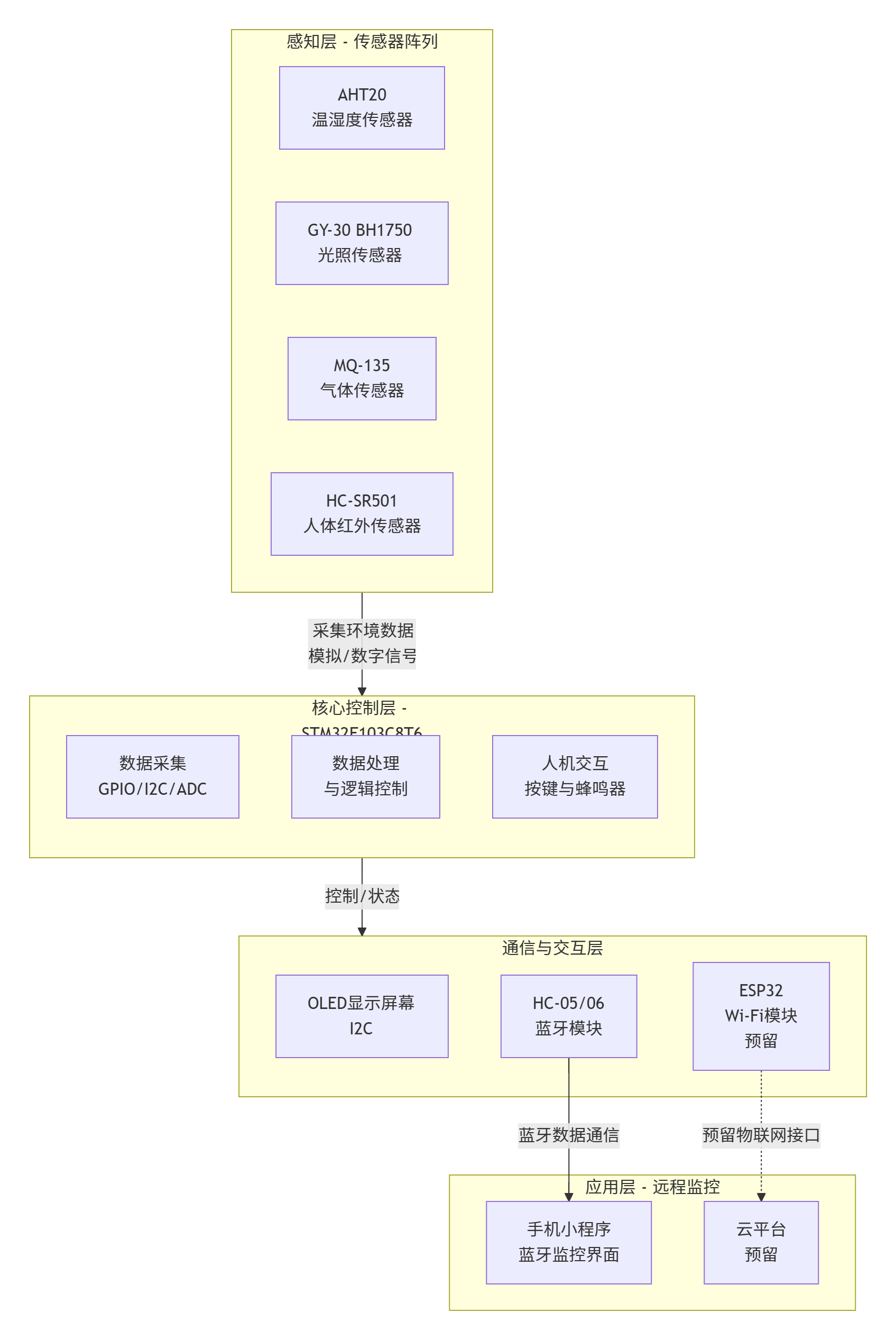
5.2 数据流与工作逻辑
- 数据采集层:STM32主控循环读取各个传感器的数据。
- 数据处理层:对原始数据进行滤波、校准和计算,得到有意义的物理量(如℃、%RH、Lux、空气质量等级)。
- 本地显示层:处理后的数据通过I2C协议发送到OLED屏幕进行刷新显示。
- 远程通信层:STM32通过串口将数据按照自定义协议格式发送给蓝牙模块,再由蓝牙传输至手机小程序。手机下发的控制指令(如布防)也通过此路径逆向传输给STM32。
逻辑控制层:主控根据当前系统模式(布防/撤防)和传感器状态(是否检测到人)执行相应的动作,如控制蜂鸣器。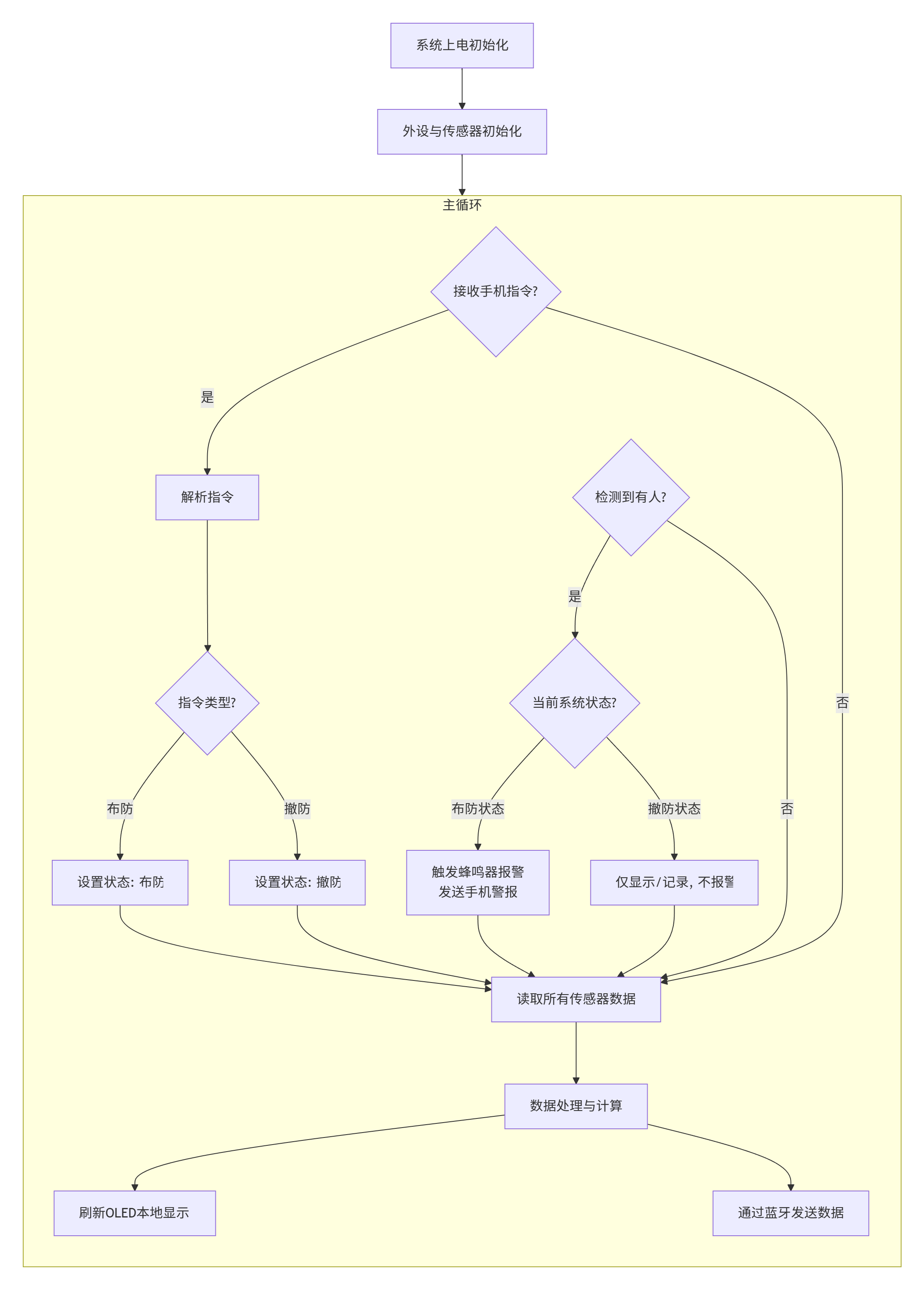
- 本地显示效果:
屏幕第一页显示:温度: 26.5℃, 湿度: 45%, 光照: 256 Lux。
屏幕循环显示气体数据:Air Q: Good, Gas: None, PM2.5: 15, Smoke: Low。
人体检测状态:P: Yes (有人) 或 P: No (无人)。
安防状态:Security On (布防) 或 Security Off (撤防)。
- 手机监控:
手机小程序成功连接蓝牙后,界面同步显示所有环境数据。
设有“布防/撤防”切换按钮。
在布防状态下,若检测到人体,手机端会弹出弹窗警报,并显示“警戒中!”。
- 安防联动:
撤防模式:检测到人体,仅在屏幕和手机端显示“有人”,无声音警报。(适合家中有人时)
布防模式:检测到人体,蜂鸣器立即鸣叫,同时手机端弹出警报。(适合出门或夜间)
6.代码展示
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body - 简化版 ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "oled.h" #include "temp_humi.h" #include "gas_sensor.h" #include "light_sensor.h" #include "bluetooth.h" #include "gas_display.h" #include "buzzer.h" #include <stdio.h> #include <string.h> /* Private variables ---------------------------------------------------------*/ I2C_HandleTypeDef hi2c1; ADC_HandleTypeDef hadc1; UART_HandleTypeDef huart1; /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); void MX_GPIO_Init(void); void MX_I2C1_Init(void); void MX_ADC1_Init(void); void MX_USART1_UART_Init(void); /** * @brief IR传感器初始化 - 简化版 * @param None * @retval None */ void IR_Sensor_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOB_CLK_ENABLE(); GPIO_InitStruct.Pin = GPIO_PIN_9; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_PULLUP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); } /** * @brief 检测人体存在 - 简化版 * @param None * @retval 1: 检测到人体, 0: 未检测到人体 */ uint8_t IR_Sensor_Detect(void) { return (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_9) == GPIO_PIN_RESET) ? 1 : 0; } /** * @brief 应用程序入口点 * @retval int */ int main(void) { /* 初始化HAL库 */ HAL_Init(); /* 配置系统时钟 */ SystemClock_Config(); /* 初始化所有外设 */ MX_GPIO_Init(); MX_I2C1_Init(); MX_ADC1_Init(); MX_USART1_UART_Init(); /* 初始化所有传感器和外设 */ OLED_Init(); TEMP_HUMI_Init(); GAS_SENSOR_Init(); LIGHT_SENSOR_Init(); IR_Sensor_Init(); Bluetooth_Init(); BUZZER_Init(); /* 显示初始屏幕 */ OLED_Clear(); OLED_ShowString(0, 0, "Starting...", 12); OLED_Refresh(); /* 初始化变量 */ float temperature = 0.0f; float humidity = 0.0f; float light = 0.0f; uint8_t ir_status = 0; uint8_t last_ir_status = 0; uint8_t bt_send_counter = 0; /* 创建气体数据结构 */ GAS_DATA gas_data = {0}; /* 气体传感器初始校准 */ GAS_SENSOR_Calibrate(400.0f); /* 手动设置一些初始值,确保数据不为空 */ gas_data.raw_ppm = 500.0f; gas_data.co2_equivalent = 400.0f; gas_data.combustible_gas = 150.0f; gas_data.smoke_density = 75.0f; gas_data.pm25 = 50.0f; gas_data.aqi = 100; gas_data.change_rate = 0.5f; gas_data.gas_type = GAS_TYPE_NORMAL; gas_data.safety_level = SAFETY_LEVEL_SAFE; gas_data.leak_detected = 0; gas_data.fire_risk = 2; /* 无限循环 */ while (1) { /* 检查布防/撤防状态是否改变 */ if (Bluetooth_GetAndClearStatusChanged()) { uint8_t armed_status = Bluetooth_GetArmedStatus(); DISPLAY_ArmedStatus(armed_status, 3000); if (armed_status) { BUZZER_LoudAlarm(); } else { BUZZER_Beep(100); } } /* 读取传感器数据 */ TEMP_HUMI_ReadData(&temperature, &humidity); if (LIGHT_SENSOR_IsConnected()) { LIGHT_SENSOR_ReadLight(&light); } ir_status = IR_Sensor_Detect(); /* 更新气体传感器数据 - 确保每次循环都更新 */ uint16_t adc_value = GAS_SENSOR_Read(); if (adc_value > 0) { GAS_SENSOR_UpdateData(&gas_data); } /* 人体检测处理 */ if (ir_status && !last_ir_status) { /* 更新显示 */ DISPLAY_UpdateEnvData(temperature, humidity, light, ir_status); DISPLAY_GasData(&gas_data); /* 发送数据到蓝牙 - 恢复原来的两次发送格式 */ /* 第一次发送基本环境数据 */ char bt_data1[150]; sprintf(bt_data1, "{\"temp\":%.1f,\"humi\":%.1f,\"light\":%.1f,\"human\":%d,\"aqi\":%d,\"pm25\":%.1f}\r\n", temperature, humidity, light, ir_status, gas_data.aqi, gas_data.pm25); Bluetooth_SendString(bt_data1); /* 短暂延时,确保第一条数据发送完成 */ HAL_Delay(20); /* 第二次发送气体详细数据 */ char bt_data2[150]; sprintf(bt_data2, "{\"co2\":%.1f,\"ppm\":%.1f,\"gas_type\":%d,\"safety\":%d,\"leak\":%d,\"fire\":%d,\"rate\":%.2f}\r\n", gas_data.co2_equivalent, gas_data.raw_ppm, gas_data.gas_type, gas_data.safety_level, gas_data.leak_detected, gas_data.fire_risk, gas_data.change_rate); Bluetooth_SendString(bt_data2); /* 布防状态下发出警报 */ if (Bluetooth_GetArmedStatus()) { BUZZER_EmergencyAlarm(); } } last_ir_status = ir_status; /* 更新显示 */ DISPLAY_UpdateEnvData(temperature, humidity, light, ir_status); DISPLAY_GasData(&gas_data); /* 处理蓝牙数据 */ Bluetooth_Process(); /* 每5秒通过蓝牙发送环境数据 */ if (++bt_send_counter >= 5) { bt_send_counter = 0; /* 恢复原来的两次发送格式 */ /* 第一次发送基本环境数据 */ char bt_data1[150]; sprintf(bt_data1, "{\"temp\":%.1f,\"humi\":%.1f,\"light\":%.1f,\"human\":%d,\"aqi\":%d,\"pm25\":%.1f}\r\n", temperature, humidity, light, ir_status, gas_data.aqi, gas_data.pm25); Bluetooth_SendString(bt_data1); /* 短暂延时,确保第一条数据发送完成 */ HAL_Delay(50); /* 第二次发送气体详细数据 */ char bt_data2[150]; sprintf(bt_data2, "{\"co2\":%.1f,\"ppm\":%.1f,\"gas_type\":%d,\"safety\":%d,\"leak\":%d,\"fire\":%d,\"rate\":%.2f}\r\n", gas_data.co2_equivalent, gas_data.raw_ppm, gas_data.gas_type, gas_data.safety_level, gas_data.leak_detected, gas_data.fire_risk, gas_data.change_rate); Bluetooth_SendString(bt_data2); } /* 切换LED指示灯状态 */ HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); /* 延时1秒 */ HAL_Delay(1000); } } /** * @brief 系统时钟配置 * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_PeriphCLKInitTypeDef PeriphClkInit = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; HAL_RCC_OscConfig(&RCC_OscInitStruct); RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2); /* 配置ADC时钟 */ PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC; PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV6; HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit); } /** * @brief GPIO初始化函数 * @param None * @retval None */ void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /* 使能GPIO时钟 */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); /* 配置PC13引脚为输出 */ HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); GPIO_InitStruct.Pin = GPIO_PIN_13; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); /* 配置PA0引脚为模拟输入(气体传感器) */ GPIO_InitStruct.Pin = GPIO_PIN_0; GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } /** * @brief I2C1初始化函数 * @param None * @retval None */ void MX_I2C1_Init(void) { hi2c1.Instance = I2C1; hi2c1.Init.ClockSpeed = 100000; hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2; hi2c1.Init.OwnAddress1 = 0; hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; hi2c1.Init.OwnAddress2 = 0; hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; HAL_I2C_Init(&hi2c1); } /** * @brief ADC1初始化函数 * @param None * @retval None */ void MX_ADC1_Init(void) { ADC_ChannelConfTypeDef sConfig = {0}; /* ADC1基本配置 */ hadc1.Instance = ADC1; hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE; hadc1.Init.ContinuousConvMode = DISABLE; hadc1.Init.DiscontinuousConvMode = DISABLE; hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START; hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT; hadc1.Init.NbrOfConversion = 1; HAL_ADC_Init(&hadc1); /* 配置ADC通道0(PA0引脚)- 气体传感器 */ sConfig.Channel = ADC_CHANNEL_0; sConfig.Rank = ADC_REGULAR_RANK_1; sConfig.SamplingTime = ADC_SAMPLETIME_55CYCLES_5; HAL_ADC_ConfigChannel(&hadc1, &sConfig); /* 校准ADC */ HAL_ADCEx_Calibration_Start(&hadc1); } /** * @brief USART1初始化函数 * @param None * @retval None */ void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 9600; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; HAL_UART_Init(&huart1); /* 启用UART接收中断 */ HAL_NVIC_SetPriority(USART1_IRQn, 0, 0); HAL_NVIC_EnableIRQ(USART1_IRQn); } /** * @brief 错误处理函数 * @retval None */ void Error_Handler(void) { __disable_irq(); while (1) { } } #ifdef USE_FULL_ASSERT void assert_failed(uint8_t *file, uint32_t line) { /* 用户可以添加自己的实现来报告文件名和行号 */ } #endif /* USE_FULL_ASSERT */
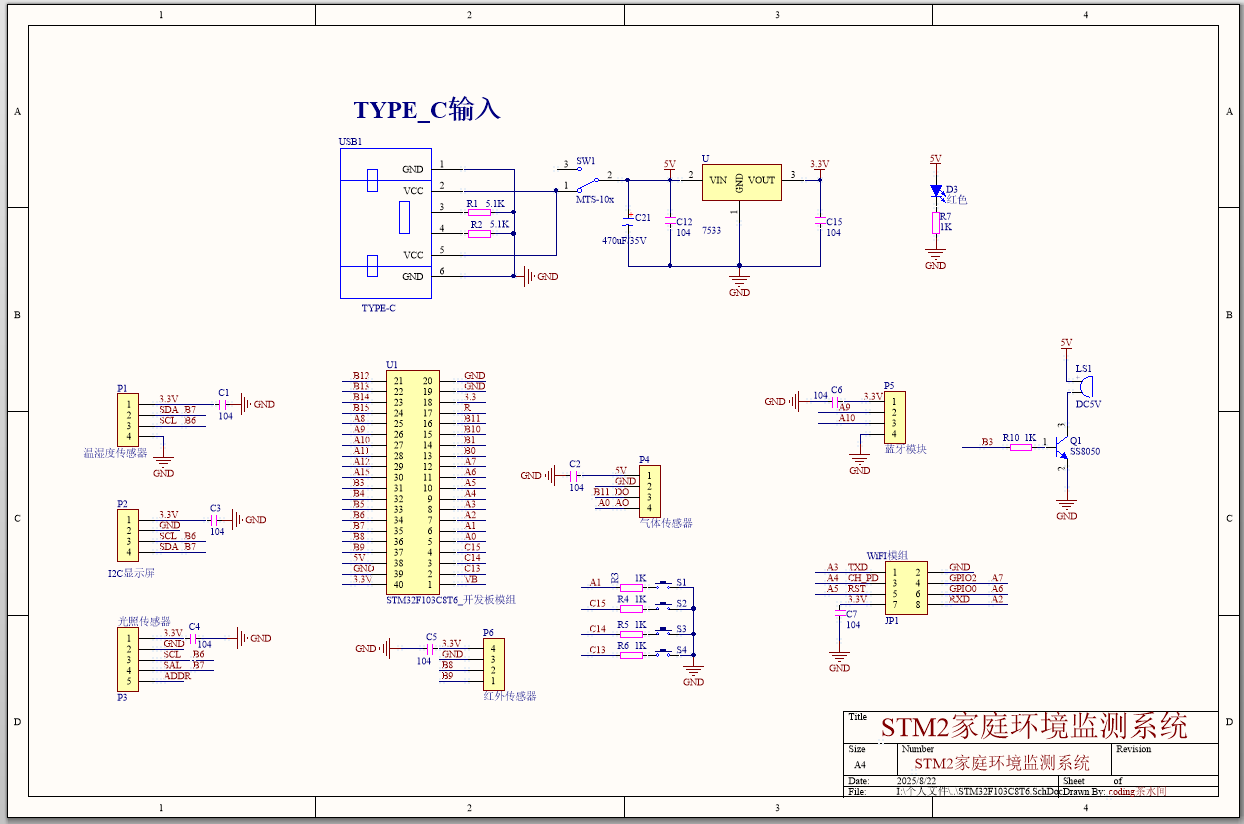
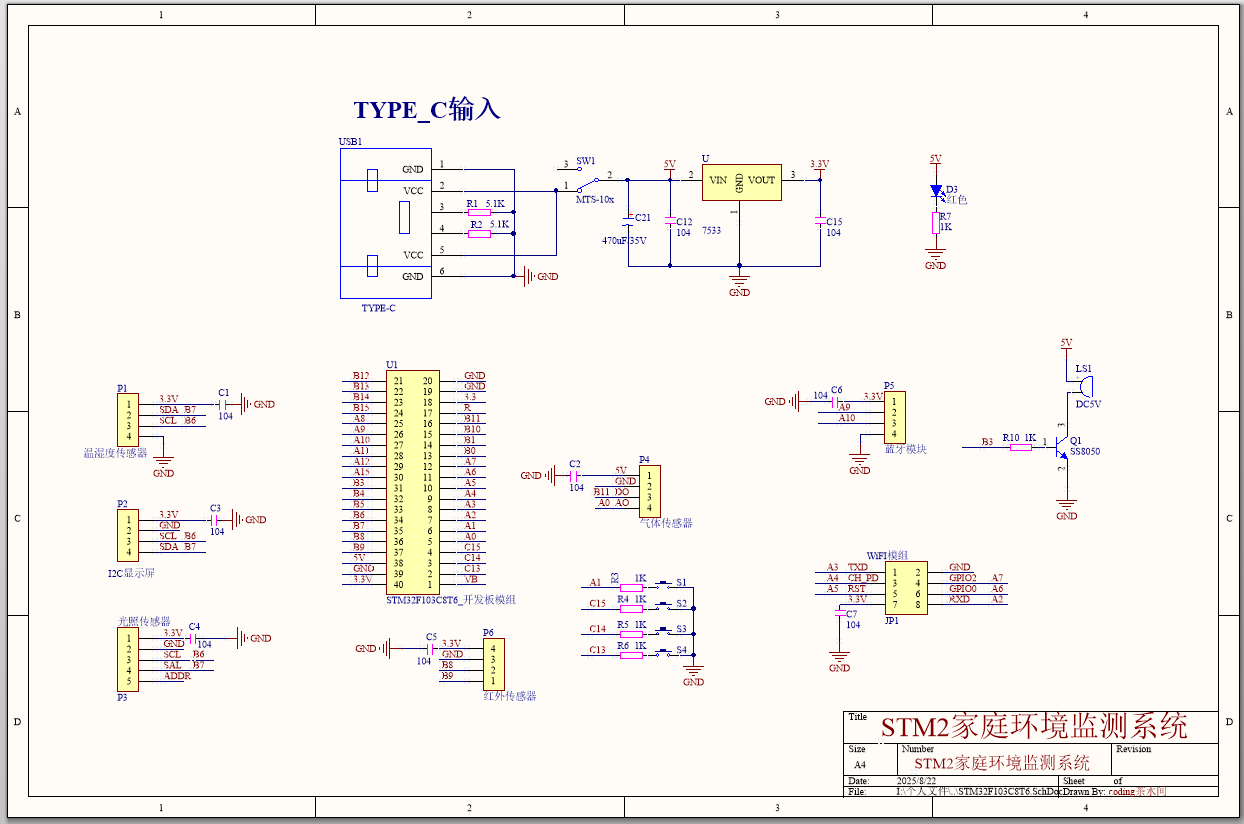
7.原理图
欢迎在评论区交流讨论!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号