第6章 图
第6章 图
6.1 图的定义和基本数据
6.1.1 图的定义
(1)图的核心定义
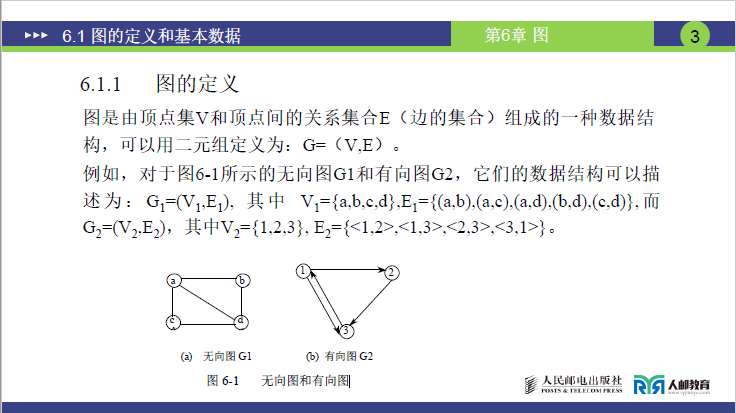
图是一种由 “顶点” 和 “顶点间关系(边 / 弧)” 构成的数据结构,用二元组定义为 G=(V,E),其中:
- V:顶点集(Vertex Set),由图中所有不重复的顶点组成;
- E:边集(Edge Set),由顶点间的关联关系(边或弧)组成。
(2)无向图与有向图的定义及二元组表示
| 类型 | 核心特征 | 二元组表示示例 | 符号区别 |
|---|---|---|---|
| 无向图 | 边无方向性,无箭头标识 | 无向图G1=(V1,E1),其中V1={a,b,c,d},E1={(a,b),(a,c),(a,d),(b,d),(c,d)} | 边集元素用小括号 ()表示,代表两点间无向边 |
| 有向图 | 边有方向性,用箭头标识(边称为 “弧”) | 有向图G2=(V2,E2),其中V2={1,2,3},E2= | 弧集元素用 尖括号 <> 表示,尖括号内前者为弧尾(箭头起点)、后者为弧头(箭头终点) |
6.1.2 图的基本术语
(1)有向图与无向图(基础分类)
- 有向图:边有方向性,边称为弧,有明确的弧尾(起点)和弧头(终点),用箭头标识。
- 无向图:边无方向性,仅表示两点间存在连接,无箭头标识。
(2)完全图、稠密图、稀疏图
①完全图
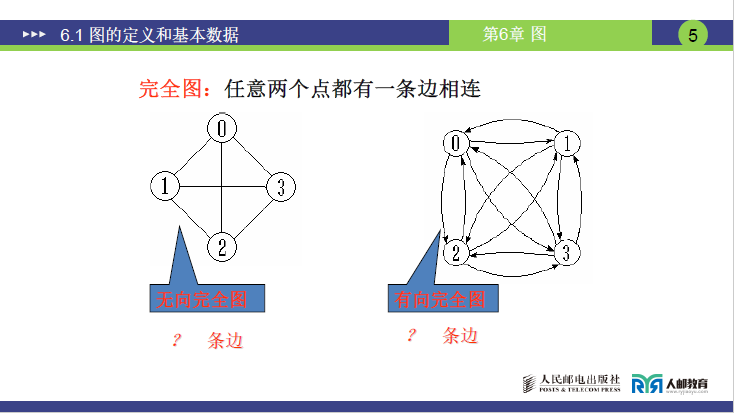
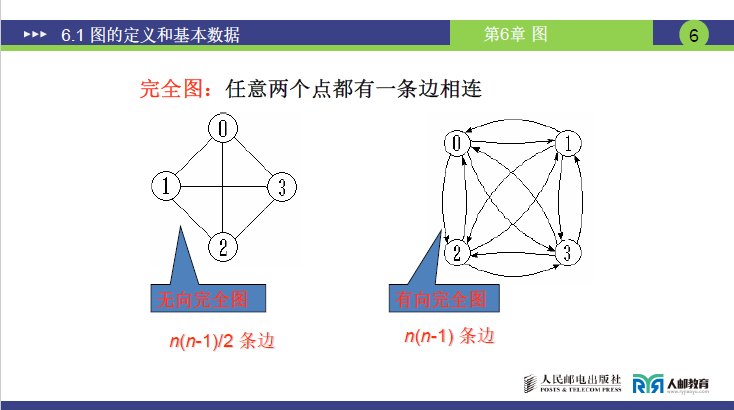
定义:任意两个顶点之间都存在边(无向图)或弧(有向图)的图,分为无向完全图和有向完全图。
- 无向完全图:n个顶点的无向完全图,边数为组合数Cn2=n(n−1)/2(推导:任意两点仅需 1 条无向边连接,共需从n个顶点选 2 个的组合数)。例如 4 个顶点的无向完全图,边数为4×3/2=6。
- 有向完全图:n个顶点的有向完全图,弧数为排列数An2=n(n−1)(推导:两点间需 2 条方向相反的弧,弧数为无向完全图边数的 2 倍)。例如 4 个顶点的有向完全图,弧数为4×3=12。
- 共同特征:完全图的边 / 弧数达到对应图类型的 “最大值”,课件中完全图示例的邻接矩阵(后续内容)对角元素为 0(顶点自身无关联),其余元素为 1。
②一般图的边 / 弧数范围
- 无向图:顶点数为n,边数e满足0≤e≤n(n−1)/2(最少 0 条边,最多无向完全图的边数);
- 有向图:顶点数为n,弧数e满足0≤e≤n(n−1)(最少 0 条弧,最多有向完全图的弧数)。
③稠密图与稀疏图
- 稠密图:边 / 弧数接近对应完全图边 / 弧数的图。
- 稀疏图:边 / 弧数远少于对应完全图边 / 弧数的图(讲课表述中 “析出符” 为口误,实际为稀疏图)。
(3)度、入度、出度
①度的通用定义
图中一个顶点依附的边或弧的数目,称为该顶点的度。
②有向图的入度与出度
有向图中顶点的度为入度与出度之和,具体定义如下:
- 入度:顶点依附的弧头(箭头指向该顶点)的数目,代表进入该顶点的弧的数量。
- 出度:顶点依附的弧尾(箭头从该顶点出发)的数目,代表从该顶点发出的弧的数量。
③无向图的度
无向图中无入度、出度之分,顶点的度即为其相连的边的数目。
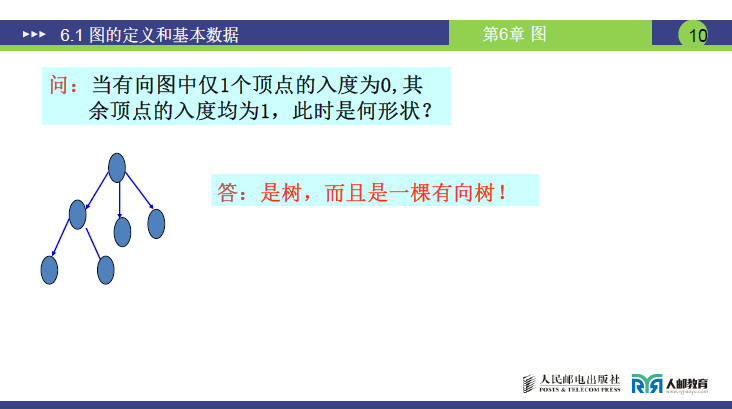
④典型问题:特殊有向图的形状
若有向图中仅 1 个顶点入度为 0,其余顶点入度均为 1,则该图为有向树(入度为 0 的顶点为树根,其余顶点对应树的子节点,有唯一的双亲节点)。
(4)连通图与强连通图
| 类型 | 适用图 | 核心定义 |
|---|---|---|
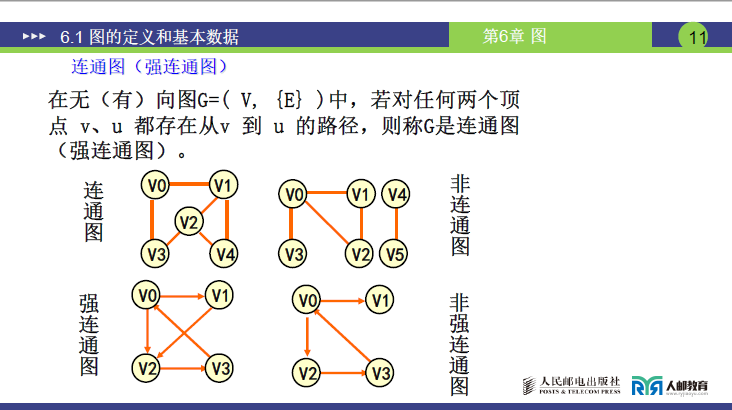
| 连通图 | 无向图 | 图中 任意两个顶点v和u 都存在从v到u的路径 |
| 强连通图 | 有向图 | 图中 任意两个顶点v和u 都存在双向路径(既存在v到u的路径,也存在u到v的路径) |
反例:若无向图中存在两个顶点组(如V0−V1−V2−V3和V4−V5),两组内顶点互通但组间无路径,则为非连通图;有向图中若存在顶点对无双向路径(如V1无法到V2),则为非强连通图。
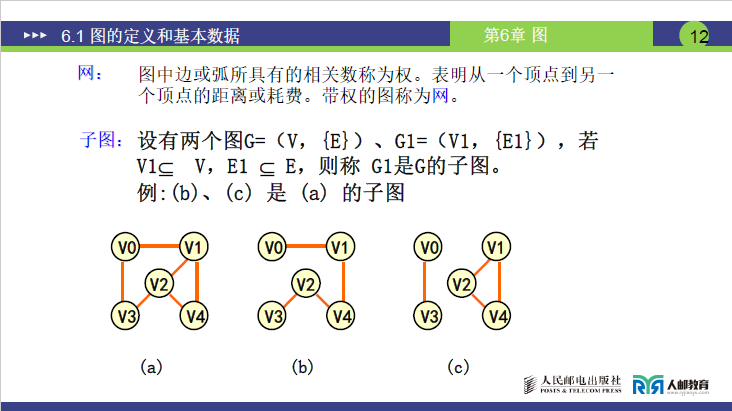
(5)网
图的边 / 弧上附带的相关数值称为权(可表示距离、耗费等),带权的图称为网,也叫有权图。
(6)子图
设两个图G=(V,{E})和G1=(V1,{E1}),若满足V1⊆V且E1⊆E,则称G1是G的子图。例如课件中图 (a) 的顶点和边的部分子集构成的图 (b)、图 (c),均为图 (a) 的子图。
6.2 图的存储结构
6.2.1 邻接矩阵(顺序存储,底层为二维数组)
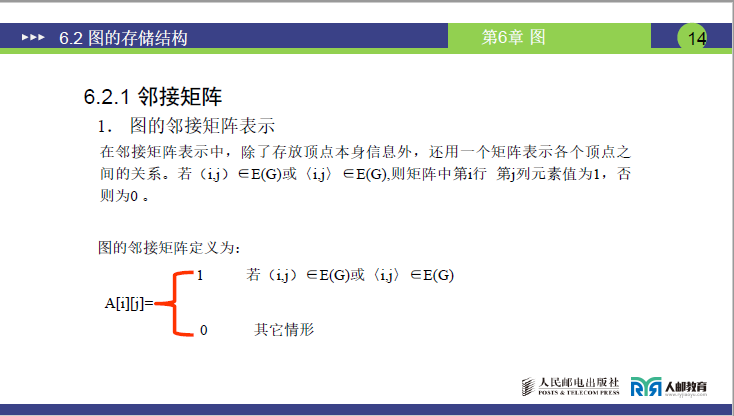
(1)邻接矩阵的定义
邻接矩阵是基于二维数组的顺序存储结构,用于存储图的顶点信息和顶点间的关系:
-
顶点信息:用一个一维数组(顶点表)存储所有顶点;
-
顶点关系:用一个
n×n的二维数组(邻接矩阵)存储,其中n为顶点数。邻接矩阵的元素定义为:
邻接矩阵通过顶点表存储顶点本身信息,通过二维矩阵存储顶点间的邻接关系:
- 若两顶点间存在边 / 弧,矩阵对应位置值为1(普通图)或边 / 弧的权值(网);
- 若不存在边 / 弧,普通图对应位置为0,网对应位置为 ∞;
- 顶点自身到自身(主对角线):考试建议记为0,教材通常记为 ∞,需注意题目约定。
(2)不同类型图的邻接矩阵表示
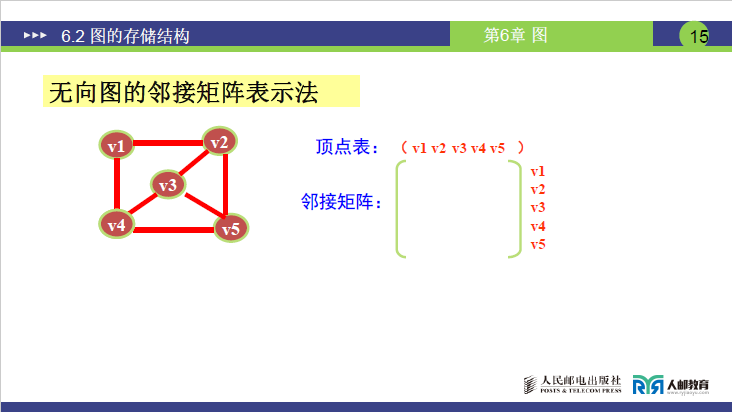
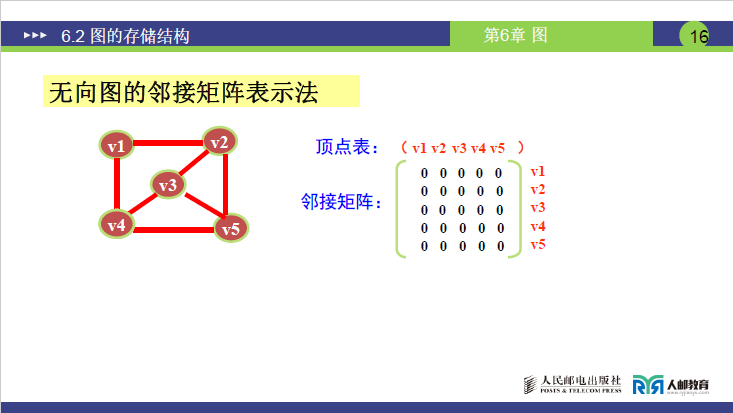
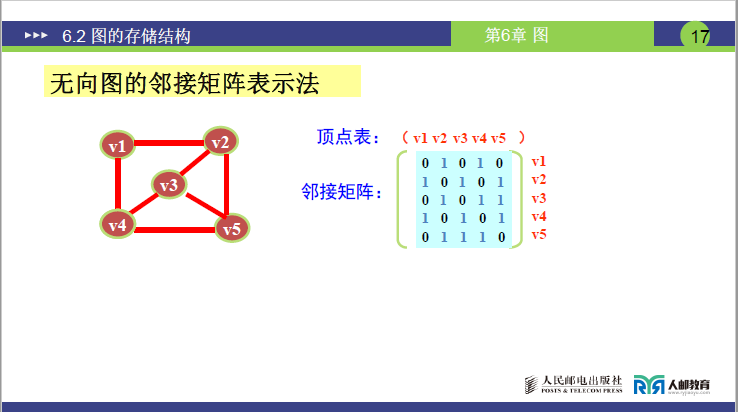
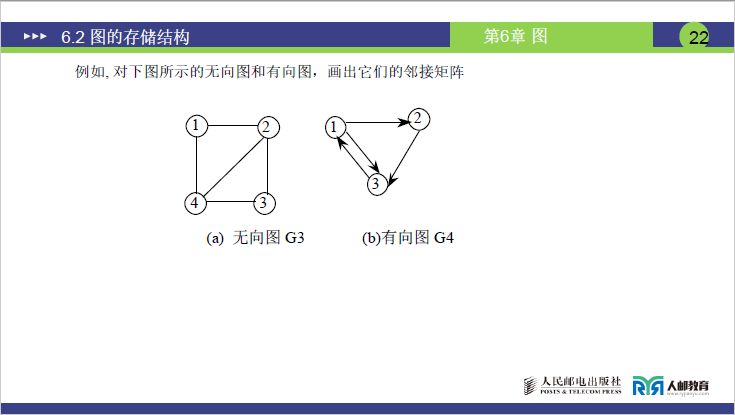
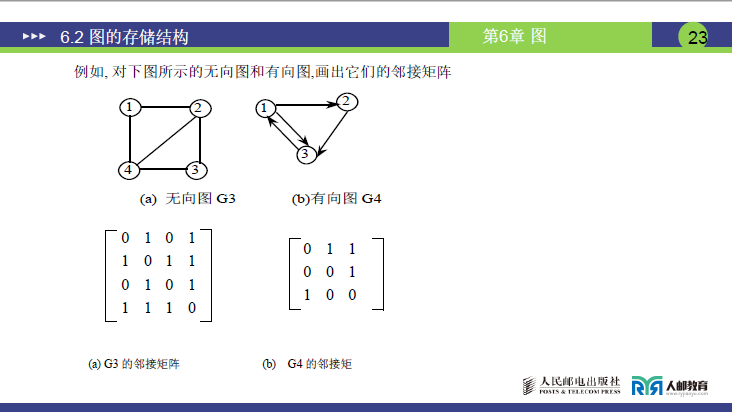
①无向图的邻接矩阵
-
构建步骤:
① 按顶点数构建
n×n矩阵(5 顶点为5×5),初始化全为 0;② 若顶点Vi与Vj有边,将矩阵[i][j]和[j][i]置为 1(无向边双向对称)。
-
讲课易错点:无向图 7 条边对应矩阵 14 个 1(每条边被双向记录,边数 = 矩阵中 1 的个数 / 2)。
-
核心特点:
- 矩阵对称;
- 第i行或第i 列1的个数为顶点i 的度;
- 完全无向图的邻接矩阵主对角线为 0,其余位置全为 1;
- 矩阵中1的个数的一半为图中边的数目
- 可通过
[i][j]是否为 1,快速判断Vi与Vj是否有边; - 占用的存储单元数目为n+2e。
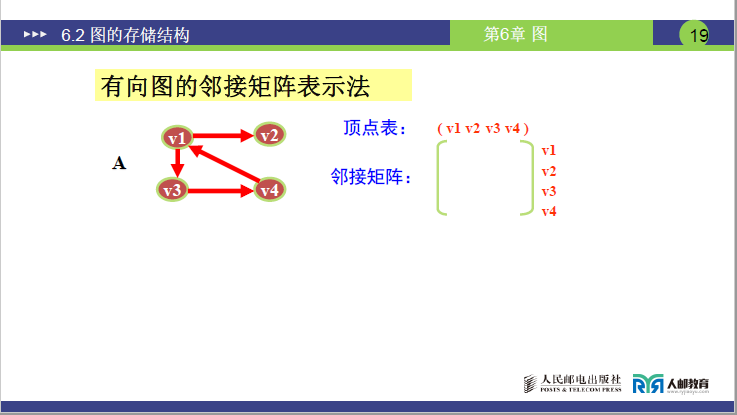
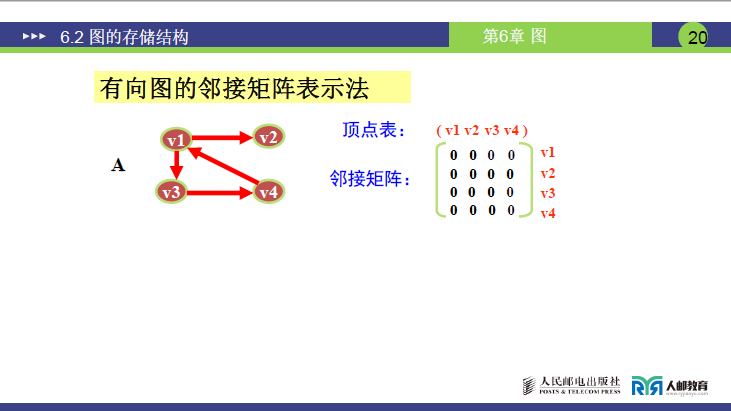
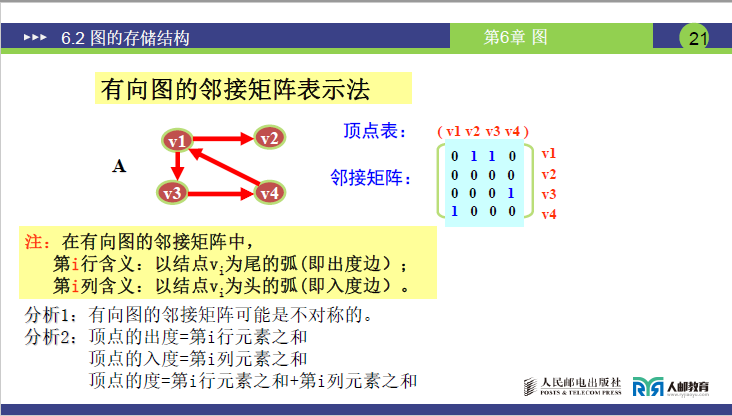
②有向图的邻接矩阵
-
构建约定:矩阵记录顶点发出去的弧(出度边),即
[i][j]=1表示存在<Vi,Vj>的弧。 -
构建步骤(以4 顶点有向图为例):
① 构建
4×4矩阵并初始化全为 0;② 若
Vi发出弧至Vj,仅将[i][j]置为 1(入度边不记录在该行)。 -
核心特点:
- 矩阵不一定对称(有向弧单向性);
- 顶点
i的出度= 第i行 1 的个数,入度= 第i列 1 的个数,总度数 = 出度 + 入度; - 矩阵中 1 的个数 = 图中弧的总数(无重复记录);
- 完全有向图的邻接矩阵主对角线为 0,其余位置全为 1;
- 很容易判断顶点i 和顶点j 是否有弧相连。
结论
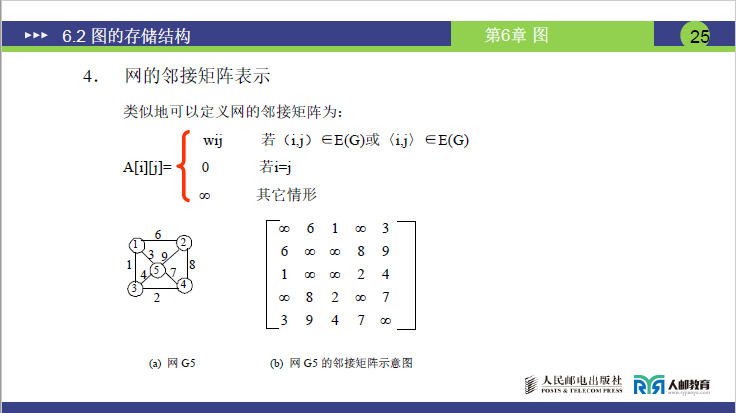
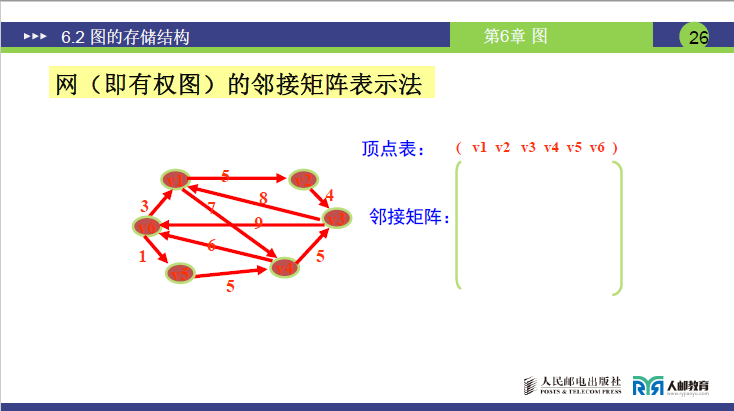
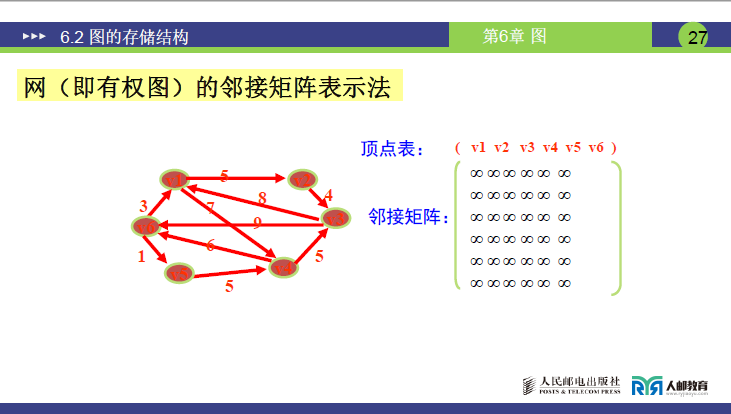
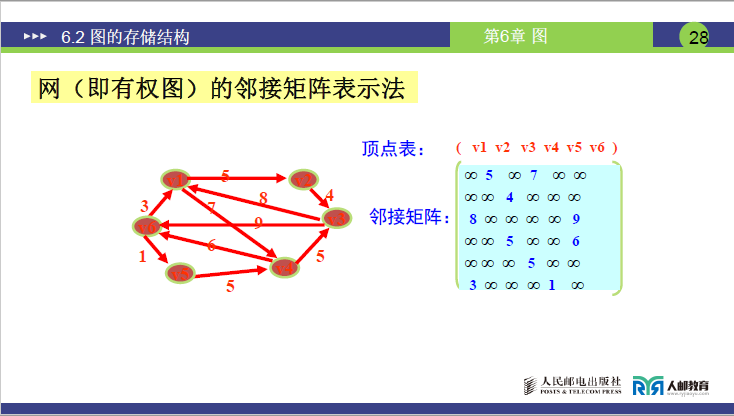
③网的邻接矩阵(带权图)
-
定义公式:
\[A[i][j] = \begin{cases} w_{ij} & \text{若}(i,j) \in E(G) \text{或} <i,j> \in E(G) \\ 0 & \text{若} i = j \\ \infty & \text{其它情形} \end{cases} \] -
构建注意事项(讲课重点强调):
① 权值wij替换普通图的 “1”,表示两顶点间边的权重;
② 主对角线的 0/∞需按题目要求选择(考试优先用 0);
③ 无向网矩阵对称,有向网矩阵不对称。
(3)邻接矩阵的优缺点(扩展补充)
- 优点:判断两顶点是否邻接效率高(O (1));计算顶点度(无向图)、出 / 入度(有向图)方便;
- 缺点:空间复杂度高(O (n²)),适合存储稠密图;稀疏图会造成大量空间浪费。
6.2.2 邻接表(链式存储,头节点 + 表节点)
(1)邻接表的存储结构(课件定义)
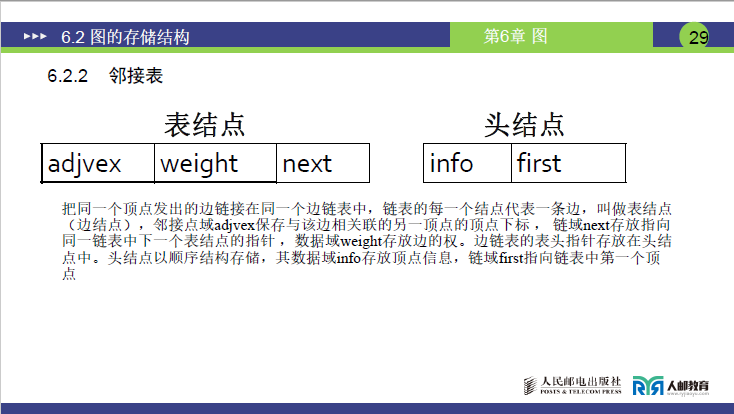
把同一个顶点发出的边链接在同一个边链表中,链表的每一个结点代表一条边,叫做表结点(边结点),邻接点域adjvex保存与该边相关联的另一顶点的顶点下标 , 链域next存放指向同一链表中下一个表结点的指针 ,数据域weight存放边的权。边链表的表头指针存放在头结点中。头结点以顺序结构存储,其数据域info存放顶点信息,链域first指向链表中第一个顶点
邻接表由头节点数组和表节点链表组成,网的表节点需额外增加权值域:
| 节点类型 | 结构组成 | 说明 |
|---|---|---|
| 头节点 | data(顶点信息)+firstarc(指向首个表节点的指针) |
按顶点顺序存储,形成头节点数组 |
| 普通图表节点 | adjvex(邻接点的顶点下标)+nextarc(指向下一表节点的指针) |
存储顶点的出度边 / 邻接边 |
| 网的表节点 | adjvex+weight(边的权值)+nextarc |
比普通图表节点多权值域,记录边的权重 |
(2)不同类型图的邻接表表示
①无向图的邻接表
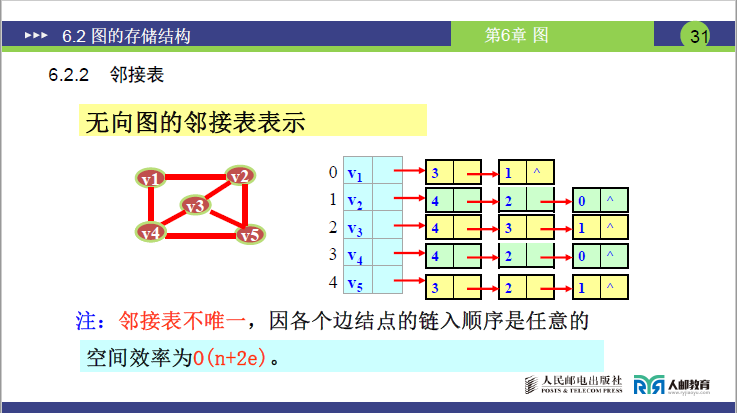
- 构建逻辑:每个顶点的头节点链表,存储所有与该顶点邻接的顶点下标(无向边双向存储,如Vi邻接Vj,则Vi链表有
j,Vj链表有i)。 - 讲课示例:5 顶点无向图中,V1的表节点为 V2(下标 3)、V4(下标 1),顺序可任意。
- 核心特点:
- 邻接表表示不唯一(表节点链入顺序可自由调整);
- 第
i个头节点的链表节点数 = 顶点i的度; - 所有表节点总数 = 2× 边数(无向边双向记录);
- 空间复杂度为O(n+2e)(n 为顶点数,e 为边数)。
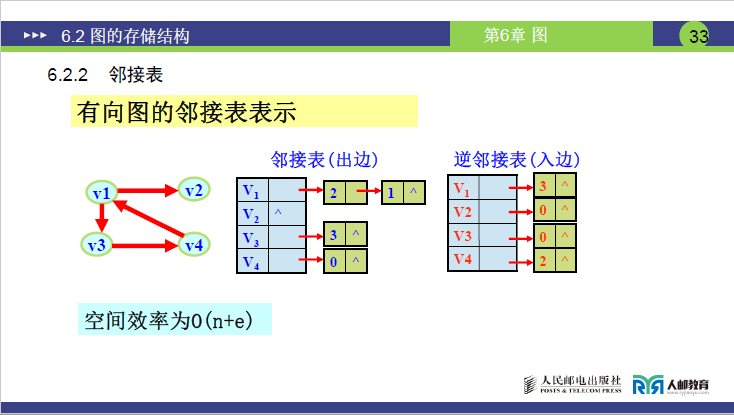
②有向图的邻接表与逆邻接表
-
邻接表(出边表):
① 存储逻辑:仅记录顶点的出度边,即表节点为顶点发出弧的终点下标;
② 特点:第
i个头节点的链表节点数 = 顶点i的出度;空间复杂度为O(n+e)(每条弧仅记录一次);无法直接求入度。 -
逆邻接表(入边表):
① 存储逻辑:记录顶点的入度边,即表节点为指向该顶点的弧的起点下标;
② 作用:解决有向图邻接表无法直接求入度的问题,第
i个头节点的链表节点数 = 顶点i的入度。 -
讲课易错点:无特殊说明时,有向图邻接表默认指出边表。
③网的邻接表
-
构建逻辑:表节点增加
weight域存储边的权值,其余结构与普通有向 / 无向图邻接表一致; -
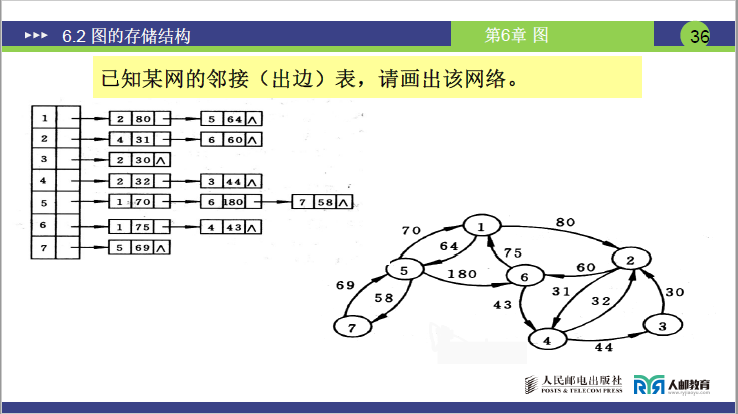
讲课典型例题:已知网的邻接表重构网
① 核心方法:根据头节点的顶点信息,遍历每个头节点的表节点,按
adjvex(邻接点下标)和weight(权值)绘制带权边;② 意义:验证了存储结构可反向恢复逻辑结构,体现数据结构 “存储 - 还原” 的核心价值。
(3)邻接表的优缺点
- 优点:空间利用率高(O (n+e)),适合存储稀疏图;便于遍历顶点的邻接边;
- 缺点:判断两顶点是否邻接效率低(需遍历对应头节点的链表);无向图存在边的重复存储。
6.2.3邻接矩阵与邻接表的核心对比
| 对比维度 | 邻接矩阵 | 邻接表 |
|---|---|---|
| 存储结构 | 二维数组(顺序存储) | 头节点数组 + 链表(链式存储) |
| 空间复杂度 | O (n²)(与边数无关) | 无向图 O (n+2e)、有向图 O (n+e) |
| 邻接判断效率 | O (1)(直接查矩阵下标) | O (d)(d 为对应顶点的度,需遍历链表) |
| 顶点度计算 | 无向图:行 / 列 1 的个数;有向图:行 = 出度、列 = 入度 | 无向图:链表节点数;有向图:邻接表 = 出度、逆邻接表 = 入度 |
| 适用场景 | 稠密图、需快速判断邻接的场景 | 稀疏图、需频繁遍历邻接边的场景 |
6.2.4讲课中的考试与学习注意事项
- 邻接矩阵主对角线约定:考试建议主对角线记为 0,教材常用∞,需严格遵循题目要求;
- 有向图邻接矩阵的边数:矩阵中 1 的个数 = 弧的总数(无向图为 1 的个数 / 2);
- 邻接表的唯一性:表节点顺序不影响存储有效性,因此同一图的邻接表表示不唯一;
- 知识衔接:掌握图的存储结构后,后续将学习图的核心操作 ——图的遍历(深度优先 / 广度优先),为后续最小生成树、最短路径等应用打基础。
6.3 图的遍历
6.3.1图的遍历概述
(1)定义
从图中某一顶点出发,访遍图中其余所有顶点且每个顶点仅被访问一次的操作,称为图的遍历。
(2)核心意义
图的遍历算法是求解图的连通性问题、拓扑排序、关键路径等后续图应用算法的基础,是图论算法体系的核心前置知识点。
(3)两种经典遍历方法
深度优先搜索(DFS)遍历、广度优先搜索(BFS)遍历,两种方法均可实现对图中所有顶点的不重复访问,且遍历序列不唯一。
6.3.2 深度优先搜索(DFS)遍历
(1)算法核心思想
深度优先搜索的本质是 “递归 + 回退”,通过 “优先访问当前顶点的未访问邻居,直到无邻居可访问时回退到上一顶点”
(2)算法执行步骤(标准流程)
- 首先访问起始顶点
i,将其访问标记置为已访问,即visited[i] = 1(初始化时所有visited[]均为 0); - 搜索与顶点
i有边相连的下一个顶点j:- 若
j未被访问(visited[j] = 0),则访问j并置visited[j] = 1,然后从j开始重复步骤 2(递归深入); - 若
j已被访问(visited[j] = 1),则继续检查与i有边相连的其他顶点;
- 若
- 若与
i有边相连的所有顶点均已访问,则回退到上一个访问过的顶点,重复步骤 2,直到图中所有顶点都被访问完毕。
(3)辅助存储结构
遍历过程需借助栈实现回溯,栈遵循 “后进先出” 原则,用于记录访问路径,当当前顶点分支探索完毕时,从栈中弹出顶点实现回溯。
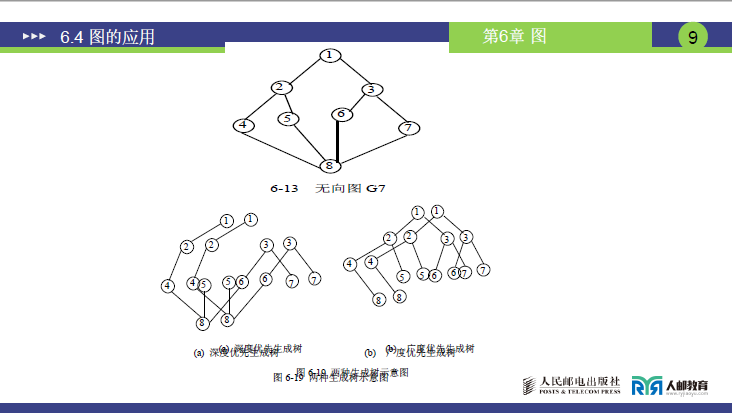
(4)典型示例(无向图 G7,从顶点 0 出发)
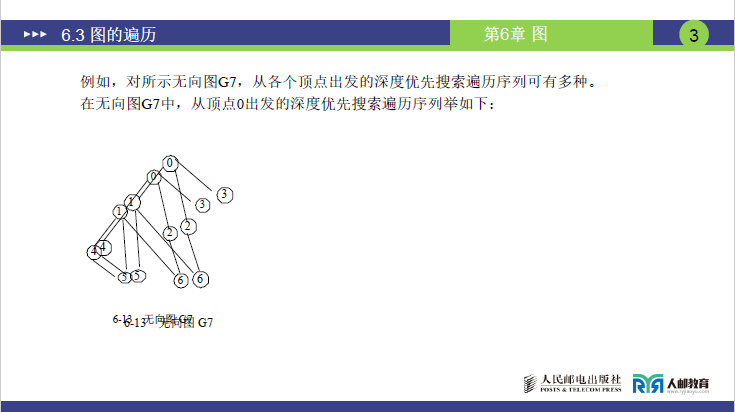
①图的背景
无向图 G7 包含顶点 0、1、2、3、4、5、6(课件页码 3-4 的图 6-13 中,顶点连接关系:0 连 1、2、3;1 连 0、4、5、6;4 连 1、5;5 连 1、4;6 连 1、2;2 连 0、6;3 连 0)。
②以顶点 0 为起始点的遍历过程(讲课内容补充)
按 “0→1→4→5→回退→1→6→2→回退→0→3” 的顺序展开,每一步跟踪visited数组和回退逻辑:
- 初始状态:
visited = [0,0,0,0,0,0,0],起始顶点选 0;- 访问 0,
visited[0] = 1,0 的邻居为 1、2、3(任选 1,讲课中选 1);
- 访问 0,
- 访问 1,
visited[1] = 1,1 的邻居为 0(已访问)、4、5、6(任选 4); - 访问 4,
visited[4] = 1,4 的邻居为 1(已访问)、5(未访问,选 5); - 访问 5,
visited[5] = 1,5 的邻居为 1(已访问)、4(已访问)→ 无未访问邻居,回退到 4; - 回退到 4 后,4 的邻居均已访问→ 继续回退到 1;
- 1 的邻居中,0、4、5 已访问,剩余 6(未访问)→ 访问 6,
visited[6] = 1; - 6 的邻居为 1(已访问)、2(未访问)→ 访问 2,
visited[2] = 1; - 2 的邻居为 0(已访问)、6(已访问)→ 无未访问邻居,回退到 6;
- 6 的邻居均已访问→ 回退到 1,1 的邻居均已访问→ 回退到 0;
- 0 的邻居中,1、2 已访问,剩余 3(未访问)→ 访问 3,
visited[3] = 1; - 3 的邻居为 0(已访问)→ 无未访问邻居,遍历结束。
③遍历序列与唯一性分析
- 上述过程的遍历序列:
0→1→4→5→6→2→3; - 序列不唯一的原因:
- 起始顶点可选(如选 1、2、3 为起始点,序列完全不同);
- 邻居顶点选择顺序可换(如 0 的邻居先选 2 而非 1,序列会变为
0→2→6→1→4→5→3;1 的邻居先选 5 而非 4,序列会变为0→1→5→4→6→2→3);
- 考试判断序列正确性的方法:检查序列是否符合 “访问当前顶点→递归访问未访问邻居→回退” 的逻辑,只要每一步都能通过 “当前顶点的未访问邻居” 推导到下一个顶点,即为正确序列(如讲课中提到的
0→3→2→6→1→5→4也是正确序列)。
(5)关键结论与考点
- 遍历起点可任意选择,考试中常指定起点;
- 同一顶点的多个未访问邻接顶点可任选访问顺序,因此DFS 遍历序列不唯一;
- 考试常考 “判断给定序列是否为合法 DFS 遍历序列”,需验证序列是否符合 “先深后广、回溯探索” 的逻辑。
6.3.3 广度优先搜索(BFS)遍历
(1)算法核心思想
遵循 “先广后深、分层访问” 的原则,先访问起始顶点的所有邻接顶点(同层顶点),再依次访问各邻接顶点的邻接顶点(下一层顶点)。
(2)算法执行步骤(课件标准流程)
- 初始化队列,将其置空;
- 选择起始顶点,访问该顶点并置
visited[起始顶点] = 1,将其入队; - 若队列非空:
- 将队首顶点出队,遍历其所有有边相连的顶点
j; - 若
j未被访问,则访问j并置visited[j] = 1,将j入队;
- 将队首顶点出队,遍历其所有有边相连的顶点
- 重复步骤 3,直到队列为空:
- 若此时所有顶点均已访问,遍历结束;
- 若仍有未访问顶点,需另选新的起始顶点(针对非连通图),重复步骤 2-3。
关键区别:与深度优先搜索的辅助结构对比
| 遍历方式 | 辅助结构 | 结构特性 | 遍历逻辑 |
|---|---|---|---|
| 深度优先搜索 | 栈(或递归栈) | 后进先出(LIFO) | 一条路走到底,走不通回退 |
| 广度优先搜索 | 队列 | 先进先出(FIFO) | 一层一层扩散,先扫邻居 |
(3)辅助存储结构
遍历过程需借助队列实现分层访问,队列遵循 “先进先出” 原则,保证同层顶点按入队顺序依次处理。
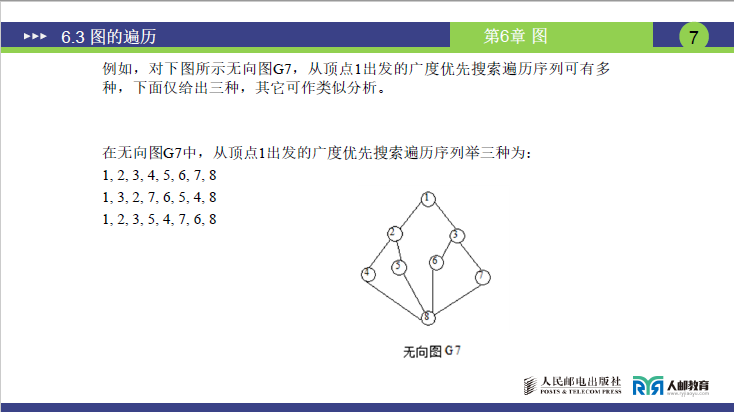
(4)典型示例(无向图 G7,从顶点 1 出发)
①图的背景
同深度优先遍历的无向图 G7(顶点 0-6,连接关系不变;讲课中补充顶点 8,推测为课件图中遗漏标注,实际连接:4 连 8、5 连 8、6 连 8、7 连 8,7 连 3)。
②以顶点 1 为起始点的遍历过程(讲课内容补充)
按 “队列进出 + 层次访问” 展开,每一步跟踪队列状态和visited数组:
- 初始状态:
visited = [0,0,0,0,0,0,0,0,0],队列空,起始顶点选 1;- 访问 1,
visited[1] = 1,1 入队→ 队列:[1];
- 访问 1,
- 队首 1 出队,遍历 1 的邻居:0(未访问)、2(未访问)、3(未访问)、4(未访问)、5(未访问)、6(未访问)(讲课中选 2、3 优先);
- 访问 2,
visited[2] = 1,2 入队;访问 3,visited[3] = 1,3 入队→ 队列:[2,3];
- 访问 2,
- 队首 2 出队,遍历 2 的邻居:0(未访问)、6(未访问)(1 已访问);
- 访问 6,
visited[6] = 1,6 入队;访问 0,visited[0] = 1,0 入队→ 队列:[3,6,0];
- 访问 6,
- 队首 3 出队,遍历 3 的邻居:0(已访问)、7(未访问);
- 访问 7,
visited[7] = 1,7 入队→ 队列:[6,0,7];
- 访问 7,
- 队首 6 出队,遍历 6 的邻居:1(已访问)、2(已访问)、8(未访问);
- 访问 8,
visited[8] = 1,8 入队→ 队列:[0,7,8];
- 访问 8,
- 队首 0 出队,遍历 0 的邻居:1(已访问)、2(已访问)、3(已访问)→ 无未访问邻居→ 队列:
[7,8]; - 队首 7 出队,遍历 7 的邻居:3(已访问)、8(未访问?8 未访问则访问 8,已访问则跳过)→ 8 已访问→ 队列:
[8]; - 队首 8 出队,遍历 8 的邻居:4(未访问)、5(未访问)、6(已访问)、7(已访问);
- 访问 4,
visited[4] = 1,4 入队;访问 5,visited[5] = 1,5 入队→ 队列:[4,5];
- 访问 4,
- 队首 4 出队,遍历 4 的邻居:1(已访问)、5(未访问?5 未访问则访问,已访问则跳过)、8(已访问)→ 5 已访问→ 队列:
[5]; - 队首 5 出队,遍历 5 的邻居:1(已访问)、4(已访问)、8(已访问)→ 无未访问邻居→ 队列空,遍历结束。
③遍历序列与唯一性分析(课件页码 7)
- 课件给出 3 种正确序列:
1,2,3,4,5,6,7,8;1,3,2,7,6,5,4,8;1,2,3,5,4,7,6,8;
- 序列不唯一的核心原因:同一层顶点的访问顺序可换(如步骤 2 中 1 的邻居先选 3 再选 2,序列变为
1,3,2,...;步骤 8 中 8 的邻居先选 5 再选 4,序列变为...,5,4,...); - 序列正确性判断:检查是否符合 “层次遍历” 逻辑 ------当前顶点的所有邻居(同一层)必须在邻居的邻居(下一层)之前访问(如
1的邻居 2、3 必须在 2 的邻居 6、0 之前访问,3 的邻居 7 必须在 6 的邻居 8 之前访问)。
(5)快速判断合法 BFS 序列的技巧
可将遍历序列按 “层” 划分:起始顶点为第 0 层,其邻接顶点为第 1 层,第 1 层顶点的邻接顶点为第 2 层,以此类推。同层顶点的顺序可任意互换,只要满足 “先访问上层顶点,再访问下层顶点” 即可判定为合法序列。
(6)两种遍历方法核心总结
| 对比维度 | 深度优先搜索(DFS) | 广度优先搜索(BFS) |
|---|---|---|
| 辅助结构 | 栈(或递归栈) | 队列 |
| 遍历顺序 | 深度优先(一条路走到底) | 广度优先(一层一层扩散) |
| 序列唯一性 | 不唯一(起始点 + 邻居选择) | 不唯一(起始点 + 同层顺序) |
| 适用场景 | 连通性判断、迷宫求解 | 最短路径(无权图)、层次分析 |
| 核心逻辑 | 递归 + 回退 | 队列进出 + 层次访问 |
6.4 图的应用
6.4.1. 生成树和最小生成树
(1)课程引入:图的核心应用方向
上一节学习了图的两种遍历算法(深度优先搜索 DFS、广度优先搜索 BFS),是图应用的基础。本节课进入图的核心应用模块,考试中涉及的图算法共 7 个,重点掌握 4 个核心方向:
- 最小生成树(本节课重点)
- 最短路径(后续课程)
- 拓扑排序(后续课程)
- 关键路径(后续课程)
图的应用核心思想:将复杂的 “图” 简化为已掌握的结构(如树、线性表)解决,例如树可简化为二叉树,图可简化为树(生成树),再进一步解决 “最小”“最短” 等优化问题。
(2)生成树和最小生成树
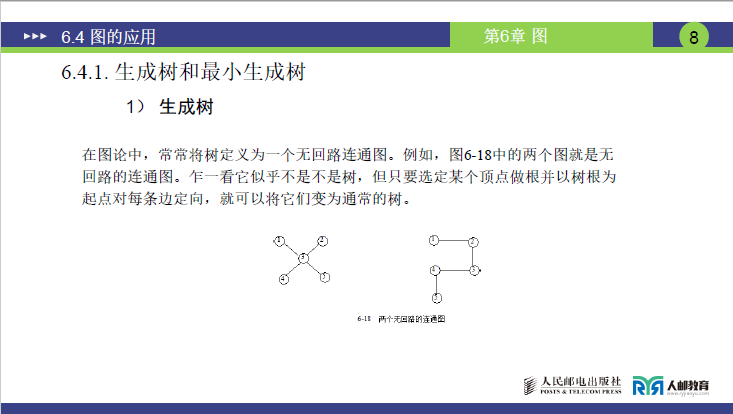
①生成树的定义与本质
1. 课件核心定义
-
树的图论定义:无回路的连通图(无环且所有顶点连通)。
-
生成树的概念:从任意连通图中提取的子图,满足两个条件:
(1)包含原图所有顶点;
(2)保持连通且无回路(符合树的定义);
(3)顶点数为
n时,边数必为n-1(树的顶点 - 边关系)。
2. 图与树的区别
| 特征 | 树(生成树的基础) | 图(生成树的来源) |
|---|---|---|
| 顶点关系 | 一对多(有根,唯一父节点) | 多对多(无固定根,可双向连接) |
| 回路(环) | 无 | 可能有 |
| 核心特点 | “甩顶点无珠子掉落”(连通无环,拎任意顶点,所有顶点都被边牵连) | 可能 “有珠子掉落”(不连通)或 “形成圈”(有环) |
3. 生成树的构造方法(衔接图的遍历)
课件隐含逻辑:通过图的遍历算法(DFS/BFS)可将连通图转化为生成树,对应两种生成树:
- 深度优先生成树(DFS 生成树):基于深度优先遍历路径构建,优先 “深入” 未访问顶点。
- 广度优先生成树(BFS 生成树):基于广度优先遍历路径构建,优先 “横向” 访问邻接顶点。
示例:无向图 G7 的生成树
- 图 6-19(a)深度优先生成树:顶点 1 为起点,遍历路径 1→2→4→8→5→3→6→7,边数 7(顶点 8 个,8-1=7),无环且连通;
- 图 6-19(b)广度优先生成树:顶点 1 为起点,遍历路径 1→2→3→4→7→5→6→8,边数 7,层级分明(如 1 的邻接顶点 2、3 先访问,再访问 2 的邻接 4 等)。
(3)最小生成树:带权图的 “最优” 生成树
①核心概念:从 “图” 到 “网”
- 网(带权图):边附带权值的图(权值可表示距离、费用、时间等);
- 最小生成树(Minimum Spanning Tree, MST):在网的所有生成树中,所有边的权值之和最小的生成树。
②应用场景
- 实际问题:全国城市间铺设光缆,使所有城市连通且光缆总长度最短(费用最低);
- 核心需求:保持连通性(无孤立顶点)、无回路(避免浪费)、权和最小(优化目标)。
③两种经典算法
课件明确提到两种求最小生成树的算法,本节课先详解普里姆算法,后续课程讲克鲁斯卡尔算法:
- 普里姆(Prim)算法:按 “顶点扩展” 思路,适合稠密图(边多顶点少);
- 克鲁斯卡尔(Kruskal)算法:按 “边排序选优” 思路,适合稀疏图(边少顶点多)。
6.4.2 普里姆(Prim)算法:顶点扩展法求 MST
(1)算法核心思想
①三大集合定义
V:图中所有顶点的全集(固定不变);U:已加入最小生成树的顶点集合(初始任选一个顶点,逐步扩大);W:未加入最小生成树的顶点集合(W = V - U,逐步缩小至空)。
②核心步骤(循环执行至W为空)
- 初始化:任选顶点
k(如课件选顶点 1),令U={k},W=V-U;用虚线连接U中顶点与W中顶点,标注边权(无直接边则标∞,表示 “不可达”); - 选最短边:在
U与W之间的所有虚线边中,选择权值最小的边,将其改为实线(加入生成树); - 扩展
U:将步骤 2 中最短边的W端顶点(未选顶点)加入U,同时从W中删除该顶点; - 修正边权:重新检查
U与W之间的虚线边 —— 若新加入U的顶点能让U到W的某顶点的边权更小,则更新该边权(“留小去大”); - 终止条件:当
W为空时,U=V,生成树构建完成(边数n-1)。
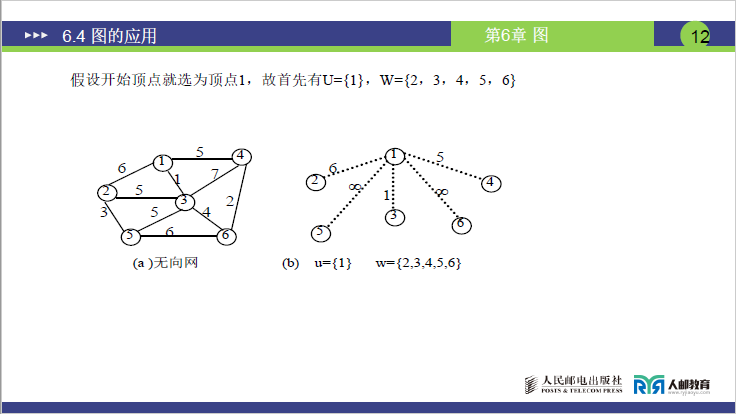
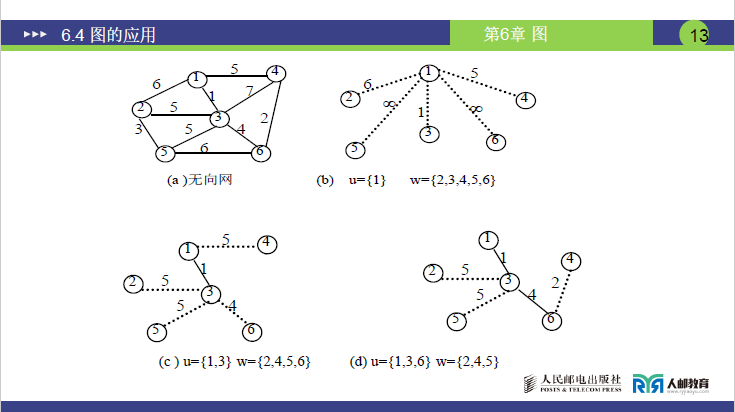
(2)实操示例:无向网(顶点 1-6)的 MST 构建(课件第 12-14 页 图 6-20)
已知条件
无向网顶点:1、2、3、4、5、6;边权如下(课件图 6-20(a)):
- 1-2(6)、1-3(1)、1-4(5);
- 3-2(5)、3-5(5)、3-6(4);
- 6-4(2)、2-5(3);
- 其余无直接边(如 1-5、1-6、4-2、4-5)标
∞。
步骤 1:初始化(课件图 6-20(b),页码 12)
U={1},W={2,3,4,5,6};- 虚线边及权值:1-2(6)、1-3(1)、1-4(5)、1-5(∞)、1-6(∞);
- 核心:仅基于
U中顶点 1 连接W,无其他顶点辅助。
步骤 2:第一次选边与扩展(课件图 6-20(c))
- 选最短边:
U-W间最小权边是 1-3(权 1),改实线; - 扩展
U:将 3(W中顶点)加入U,此时U={1,3},W={2,4,5,6}; - 修正边权:基于新加入的 3,更新
U-W边权:- 3-2(5)<1-2(6)→ 删 1-2(6),改虚线 3-2(5);
- 3-5(5)<1-5(∞)→ 删 1-5(∞),改虚线 3-5(5);
- 3-6(4)<1-6(∞)→ 删 1-6(∞),改虚线 3-6(4);
- 3-4(7)>1-4(5)→ 保留虚线 1-4(5);
- 结果:
U有 2 个顶点,生成树有 1 条边(1-3)。
步骤 3:第二次选边与扩展(课件图 6-20(d))
- 选最短边:
U-W间最小权边是 3-6(权 4),改实线; - 扩展
U:将 6 加入U,U={1,3,6},W={2,4,5}; - 修正边权:基于新加入的 6,更新
U-W边权:- 6-4(2)<1-4(5)→ 删 1-4(5),改虚线 6-4(2);
- 6-2(∞)>3-2(5)→ 保留 3-2(5);
- 6-5(6)>3-5(5)→ 保留 3-5(5);
- 结果:生成树新增边 3-6,共 2 条边。
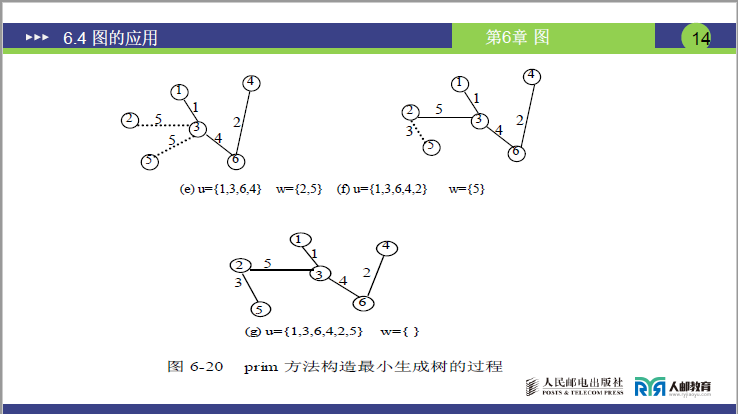
步骤 4:第三次选边与扩展(课件图 6-20(e))
- 选最短边:
U-W间最小权边是 6-4(权 2),改实线; - 扩展
U:将 4 加入U,U={1,3,6,4},W={2,5}; - 修正边权:基于新加入的 4,检查
U-W边:- 4-2(∞)>3-2(5)→ 保留 3-2(5);
- 4-5(∞)>3-5(5)→ 保留 3-5(5);
- 无更新,直接保留原有虚线;
- 结果:生成树新增边 6-4,共 3 条边。
步骤 5:第四次选边与扩展(课件图 6-20(f))
- 选最短边:
U-W间最小权边是 3-2(权 5),改实线; - 扩展
U:将 2 加入U,U={1,3,6,4,2},W={5}; - 修正边权:基于新加入的 2,更新
U-W边权:- 2-5(3)<3-5(5)→ 删 3-5(5),改虚线 2-5(3);
- 结果:生成树新增边 3-2,共 4 条边。
步骤 6:第五次选边与终止(课件图 6-20(g))
- 选最短边:
U-W间仅存虚线 2-5(权 3),改实线; - 扩展
U:将 5 加入U,U={1,3,6,4,2,5}=V,W=空; - 终止条件满足,生成树构建完成;
- 最终生成树边集:1-3(1)、3-6(4)、6-4(2)、3-2(5)、2-5(3);
- 总权和:1+4+2+5+3=15(最小权和)。
(3)算法规律与学习提示
- 步骤数规律:
n个顶点需n-1次选边(生成树边数),加 1 次初始化,共n步(如 6 个顶点,5 次选边 + 1 次初始化 = 6 步); - 核心逻辑:始终围绕 “
U扩展”,每次选 “U-W 最短边”,保证生成树权和最小(贪心思想); - 画图技巧:初始化用虚线,选边后变实线,修正边权时 “只换更小的,不换更大的”;
- 考试重点:掌握算法思想(集合变化、选边逻辑),能手动模拟小案例(如 3-5 个顶点的网),无需死记代码(第二遍课程再讲实现)。
6.4.3克鲁斯卡尔(Kruskal)算法:边排序法
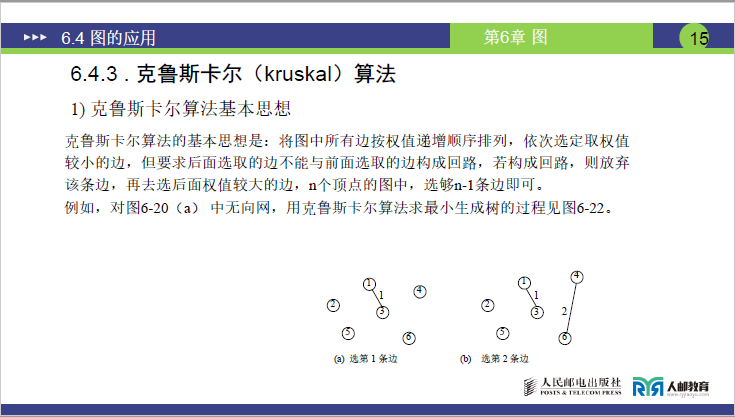
(1)算法基本思想
- 排序边:将图中所有边按权值递增顺序排列(需依赖排序算法,后续第八章详细讲解);
- 选边判回路:依次选取权值最小的边,若该边与已选边不构成回路,则保留该边;若构成回路,则丢弃该边,继续选下一条权值更大的边;
- 终止条件:对于含
n个顶点的图,当选中n-1条边时,算法结束(n-1条无回路边可构成树,且权值和最小)。
(2)与普里姆算法的区别
| 对比维度 | 普里姆算法 | 克鲁斯卡尔算法 |
|---|---|---|
| 扩展思路 | 按顶点扩展(U逐步扩大) |
按边扩展(选排序后的边) |
| 适合图类型 | 稠密图(边多,顶点少) | 稀疏图(边少,顶点多) |
| 核心难点 | 修正U-W边权 |
判断边是否形成回路(需并查集) |
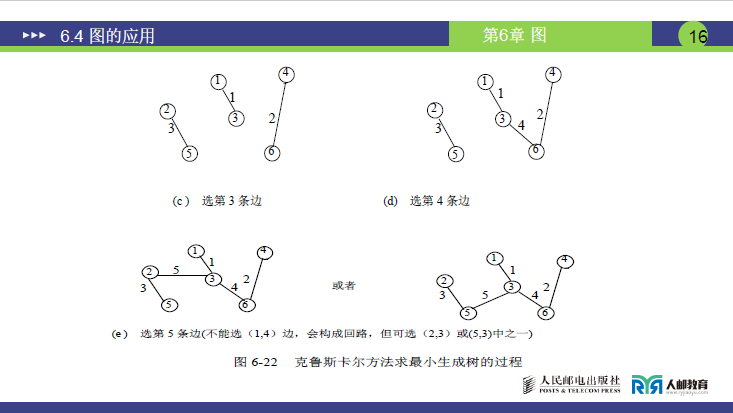
(3)算法执行步骤(结合课件图 6-22 示例)
课件以 “图 6-20 (a) 中的无向网” 为示例(含 6 个顶点,需选 5 条边),具体选边过程如下(对应图 6-22 (a)-(e),课件页码 15-16):
| 步骤 | 选边操作 | 权值 | 是否构成回路 | 已选边集合(边:权值) | 备注 |
|---|---|---|---|---|---|
| 1 | 选边 (1,3) | 1 | 否(初始无已选边) | 所有边中权值最小的边(对应图 6-22 (a)) | |
| 2 | 选边 (2,6) | 2 | 否(与 (1,3) 无公共顶点,无回路) | 剩余边中权值最小的边(对应图 6-22 (b)) | |
| 3 | 选边 (3,5) | 3 | 否(与 (1,3) 公共顶点为 3,不构成回路) | 剩余边中权值最小的边(对应图 6-22 (c)) | |
| 4 | 候选边 (1,4) | 4 | 是(若选 (1,4),1 与 4 无已选边连接?此处需结合原图:实际 (1,4) 会与 (1,3)、(3,5) 等构成回路,故丢弃) | 不变 | 丢弃后选下一条权值为 5 的边(对应图 6-22 (d)) |
| 5 | 选边 (2,3) 或 (5,3) | 5 | 否(选 (2,3):与 (2,6) 公共顶点 2、与 (1,3) 公共顶点 3,无回路;选 (5,3):与 (3,5) 重复,故任选其一) | 此时已选 4 条边,需再选 1 条(对应图 6-22 (e)) | |
| 6 | 选最后一条权值合适的边(如 (4,6),权值 4?需结合原图,最终凑够 5 条边) | - | 否 | 共 5 条边,满足 n-1(6-1=5) | 算法结束,得到最小生成树 |
(4)关键说明
- 回路判断核心:选边时需检查 “边的两个顶点是否已在同一连通分量中”(后续可通过 “并查集” 数据结构高效实现,本节课暂不展开);
- 与普里姆算法的区别:普里姆算法 “从顶点出发”(先选起始顶点,逐步扩展连通分量),克鲁斯卡尔算法 “从边出发”(先排序边,逐步选无回路边),前者更适合稠密图,后者更适合稀疏图;
- 最小性保证:因每次选权值最小的无回路边,最终
n-1条边的权值和必然最小,符合最小生成树定义。
6.4.4 单源点最短路径
(1)单源点最短路径的定义
- 问题背景:在带权有向网
G=(V,E)中,给定一个 “源点”(出发点)v₁,求v₁到其他所有顶点的最短路径(路径上各边权值之和最小,而非边数最少); - 关键前提:边的权值非负;若两顶点无直接边,初始距离设为
∞(表示无直接通路,可能通过中转顶点到达); - 应用场景:交通网络中 “从某一城市到其他所有城市的最短距离 / 时间 / 费用” 计算。
(2)迪杰斯特拉(Dijkstra)算法 —— 单源点最短路径的核心解法
①算法基本思想
算法通过 “逐步扩充已确定最短路径的顶点集合” 实现,核心是两个集合的操作:
- 集合
S:存放已求出最短路径的顶点(初始仅含源点v₁,v₁到自身的距离为 0); - 集合
V-S(记为W):存放未确定最短路径的顶点(初始含除v₁外的所有顶点,v₁到W中顶点的初始距离:有直接边则为边权,无直接边则为∞)。
算法步骤:
- 初始化
S={v₁},W=V-{v₁},设置v₁到自身距离为 0,到W中顶点的初始距离; - 从
W中选一个 “v₁到其距离最小的顶点vₘ”,将vₘ加入S; - 以
vₘ为中转顶点,修正v₁到W中剩余顶点的距离:若v₁→vₘ的距离 +vₘ→vⱼ的距离 <v₁→vⱼ的当前距离,则更新v₁→vⱼ的距离为前者; - 重复步骤 2-3,直到
S=V(W为空),此时v₁到所有顶点的最短路径均已确定。
②算法执行步骤(结合课件图 6-27 示例)
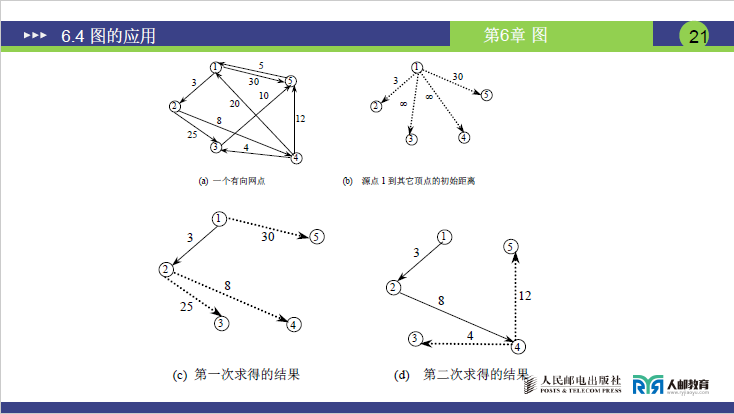
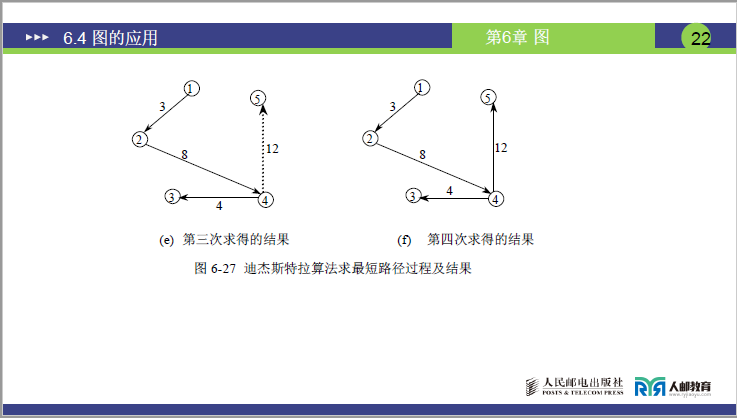
课件以 “图 6-27 (a) 的有向网” 为示例(源点为顶点 1,共 5 个顶点:1、2、3、4、5),具体执行过程如下(对应图 6-27 (a)-(f),课件页码 19-22):
A. 初始状态(对应图 6-27 (a)、(b))
- 源点
v₁=1,S={1},W={2,3,4,5}; - 初始距离(
1到各顶点的距离):1→1:0(已确定);1→2:3(有直接边,边权 3);1→3:∞(无直接边);1→4:∞(无直接边,注意:有向网中 “4→1” 有边,但 “1→4” 无边);1→5:30(有直接边,边权 30)。
B.第一次迭代(对应图 6-27 (c))
- 从
W={2,3,4,5}中选距离最小的顶点:2(距离 3),将2加入S,此时S={1,2},W={3,4,5}; - 以
2为中转顶点,修正1到W中顶点的距离:1→3:原距离∞,中转后1→2(3) +2→3(25)= 28 <∞,故更新为 28;1→4:原距离∞,中转后1→2(3) +2→4(8)= 11 <∞,故更新为 11;1→5:原距离 30,中转后1→2(3) +2→5(∞)=∞> 30,不更新;
- 此时
1到W中顶点的距离:3→28、4→11、5→30(对应图 6-27 (c))。
C.第二次迭代(对应图 6-27 (d))
- 从
W={3,4,5}中选距离最小的顶点:4(距离 11),将4加入S,此时S={1,2,4},W={3,5}; - 以
4为中转顶点,修正1到W中顶点的距离:1→3:原距离 28,中转后1→4(11) +4→3(4)= 15 < 28,故更新为 15;1→5:原距离 30,中转后1→4(11) +4→5(12)= 23 < 30,故更新为 23;
- 此时
1到W中顶点的距离:3→15、5→23(对应图 6-27 (d))。
D.第三次迭代(对应图 6-27 (e))
- 从
W={3,5}中选距离最小的顶点:3(距离 15),将3加入S,此时S={1,2,4,3},W={5}; - 以
3为中转顶点,修正1到5的距离:1→5:原距离 23,中转后1→3(15) +3→5(10)= 25 > 23,不更新;
- 此时
1到5的距离仍为 23(对应图 6-27 (e))。
E.第四次迭代(对应图 6-27 (f))
- 从
W={5}中选唯一顶点5(距离 23),将5加入S,此时S={1,2,4,3,5}(W为空); - 无剩余顶点需修正,算法结束。
F.最终结果(源点 1 到各顶点的最短路径)
| 源点→顶点 | 最短路径 | 路径权值和(最短距离) |
|---|---|---|
| 1→1 | 1 | 0 |
| 1→2 | 1→2 | 3 |
| 1→3 | 1→2→4→3 | 3+8+4=15 |
| 1→4 | 1→2→4 | 3+8=11 |
| 1→5 | 1→2→4→5 | 3+8+12=23 |
(3)关键说明
- 与最小生成树的区分技巧:
- 最小生成树:处理无向网,目标是选
n-1条边使权值和最小(构成树); - 迪杰斯特拉算法:处理有向网,目标是求 “单源点到所有顶点的最短路径”(非树结构,是路径集合);
- 最小生成树:处理无向网,目标是选
- 算法理解方法:强调 “跑例子”—— 通过手动模拟每一步选顶点、修正距离的过程,才能理解算法逻辑(避免死记硬背思想);
- 时间复杂度:若用邻接矩阵存储图,每次选
W中最小距离顶点需O(n),修正距离需O(n),共迭代n次,总时间复杂度为O(n²)。
所有顶点对之间的最短路径
-
问题定义
- 给定有向网
G=(V,E),对任意一对有序顶点(vᵢ, vⱼ)(i≠j),求vᵢ到vⱼ的最短距离,以及vⱼ到vᵢ的最短距离(需考虑有向边的方向)。
- 给定有向网
-
求解方法
-
方法 1:重复执行迪杰斯特拉算法
n次-
思路:轮流将每个顶点作为 “源点”,对每个源点执行一次迪杰斯特拉算法,即可得到所有顶点对的最短路径;
-
时间复杂度:每次迪杰斯特拉算法时间复杂度为
O(n²),重复n次后,总时间复杂度为O(n³); -
适用场景:边权非负的有向网(迪杰斯特拉算法不支持负权边)。
-
-
方法 2:弗洛伊德(Floyd)算法
-
思路:通过 “动态规划” 思想,引入 “中转顶点
k”,逐步更新vᵢ到vⱼ的最短距离(d[i][j] = min(d[i][j], d[i][k] + d[k][j])),直接在距离矩阵上进行变换; -
时间复杂度:
O(n³)(与方法 1 相同,但实现更简洁,且支持负权边,不支持负权回路); -
优势:无需重复调用迪杰斯特拉算法,一次遍历即可得到所有顶点对的最短路径。
-
-
关键说明
-
两种方法的时间复杂度均为
O(n³),但弗洛伊德算法的代码实现更简洁,且对负权边的兼容性更好(需注意无负权回路); -
应用场景:当需要一次性求所有顶点对的最短路径时(如交通网络中 “所有城市间的最短路线表”),优先选择弗洛伊德算法;若仅需单源点路径,迪杰斯特拉算法更高效。
-
-
6.4.5 拓扑排序(课件 P24-30)
拓扑排序是图的重要应用之一,核心解决 “有先后依赖关系的活动如何有序执行” 的问题,广泛用于工程调度、课程安排等场景。
(1)拓扑排序的引入
在实际场景中,许多活动存在先后依赖关系:
-
工程场景:大工程拆分为多个子活动(如 “设计图纸” 需在 “施工” 前完成),需按依赖关系有序执行才能高效完成。
-
课程安排场景(讲课重点示例):计算机专业课程开设存在 “先修 - 后继” 关系(如 “数据结构” 需先学 “程序设计基础” 和 “离散数学”),不能随意安排顺序。
拓扑排序的本质就是:将存在依赖关系的活动(顶点)排列成一个线性序列,确保所有前驱活动先执行、后继活动后执行。
(2)AOV 网:拓扑排序的载体
为了描述活动的依赖关系,引入AOV 网(顶点表示活动的网络,Activity On Vertices),其定义与性质如下:
| 核心要素 | 定义 |
|---|---|
| 顶点(Vertex) | 表示一个 “活动”(如课程 “高等数学”、“数据结构”) |
| 有向边(Edge) | 表示活动的 “优先关系”:若存在有向边<<i,j>,则活动i是活动j的直接前驱,活动j是活动i的直接后继(即i必须完成后,j才能开始) |
| 关键性质 | 1. 传递性:若i是j的前驱,j是k的前驱,则i是k的前驱;2. 反自反性:任何活动不能以自身为前驱 / 后继;3. 无环性:AOV 网中不能存在有向环(否则会出现 “活动 A 依赖 B,B 依赖 A” 的矛盾,工程无法进行) |
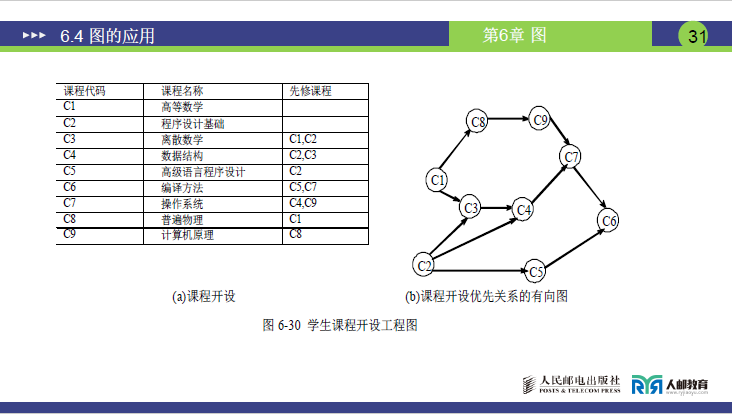
示例:计算机专业课程的 AOV 网
课件中给出计算机专业核心课程的 “先修关系表” 及对应的 AOV 网,具体如下:
-
课程先修关系表(讲课详细解读):
课程代号 课程名称 先修课程(直接前驱) 解读(讲课补充) C1 高等数学 无 无先修课,可最早开设 C2 程序设计基础 无 无先修课,可最早开设 C3 离散数学 C1、C2 需先学 “高等数学(C1)” 和 “程序设计基础(C2)” C4 数据结构 C2、C3 需先学 “程序设计基础(C2)” 和 “离散数学(C3)” C5 高级语言程序设计 C2 需先学 “程序设计基础(C2)” C6 编译原理 C5、C7 计算机四大王牌课之一,需先学 “高级语言(C5)” 和 “操作系统(C7)” C7 操作系统 C4、C9 需先学 “数据结构(C4)” 和 “普通物理(C9)” C8 计算机原理 C1 需先学 “高等数学(C1)” C9 普通物理 C1 需先学 “高等数学(C1)” -
对应的 AOV 网(图 6-30(b)):
- 顶点:C1~C9(9 门课程,即 9 个活动);
- 有向边:
<C1,C3>(C1 是 C3 的先修)、<C2,C3>(C2 是 C3 的先修)、<C3,C4>(C3 是 C4 的先修)等,完全体现先修关系。
(3)拓扑排序的算法步骤
拓扑排序的核心是 “反复找入度为 0 的顶点(无未完成的前驱活动),删除其及出边”,具体步骤如下:
- 选顶点:在 AOV 网中选择一个入度为 0的顶点(无任何前驱活动未完成),将其输出到拓扑序列中;
- 删边:从 AOV 网中删除该顶点,以及所有从该顶点出发的有向边(这些边对应的后继活动的 “前驱依赖” 已满足);
- 循环终止:重复步骤 1 和 2,直到以下两种情况之一:
- 情况 1:AOV 网中所有顶点都被输出 → 拓扑排序成功,AOV 网无环(工程可正常执行);
- 情况 2:网中无入度为 0 的顶点,但仍有顶点未输出 → 拓扑排序失败,AOV 网存在有向环(工程无法执行)。
(4)拓扑排序示例
示例 1:计算机课程 AOV 网的拓扑排序(讲课详细推导)
以图 6-30(b)的课程 AOV 网为例,逐步执行拓扑排序:
- 初始状态:入度为 0 的顶点是C1(高等数学)、C2(程序设计基础)(无先修课);
- 输出 C1 → 删除 C1 的出边
<C1,C3>、<C1,C8>、<C1,C9>; - 此时入度为 0 的顶点:C2(入度仍 0)、C8(删除
<C1,C8>后入度 0)、C9(删除<C1,C9>后入度 0)。
- 输出 C1 → 删除 C1 的出边
- 输出 C2 → 删除 C2 的出边
<C2,C3>、<C2,C4>、<C2,C5>;- 此时入度为 0 的顶点:C3(删除
<C1,C3>和<C2,C3>后入度 0)、C8、C9。
- 此时入度为 0 的顶点:C3(删除
- 输出 C8 → 无出边(C8 无后继课程),直接删除;
- 输出 C9 → 删除 C9 的出边
<C9,C7>; - 此时入度为 0 的顶点:C3、C5(删除
<C2,C5>后入度 0)。
- 输出 C9 → 删除 C9 的出边
- 输出 C3 → 删除 C3 的出边
<C3,C4>;- 输出 C5 → 删除 C5 的出边
<C5,C6>; - 此时入度为 0 的顶点:C4(删除
<C2,C4>和<C3,C4>后入度 0)。
- 输出 C5 → 删除 C5 的出边
- 输出 C4 → 删除 C4 的出边
<C4,C7>;- 此时入度为 0 的顶点:C7(删除
<C4,C7>和<C9,C7>后入度 0)。
- 此时入度为 0 的顶点:C7(删除
- 输出 C7 → 删除 C7 的出边
<C7,C6>;- 此时入度为 0 的顶点:C6(删除
<C5,C6>和<C7,C6>后入度 0)。
- 此时入度为 0 的顶点:C6(删除
- 输出 C6 → 所有顶点输出完毕。
- 最终拓扑序列(一种可能):
C1→C2→C8→C9→C3→C5→C4→C7→C6(序列不唯一,只要满足依赖关系即可)。
- 最终拓扑序列(一种可能):
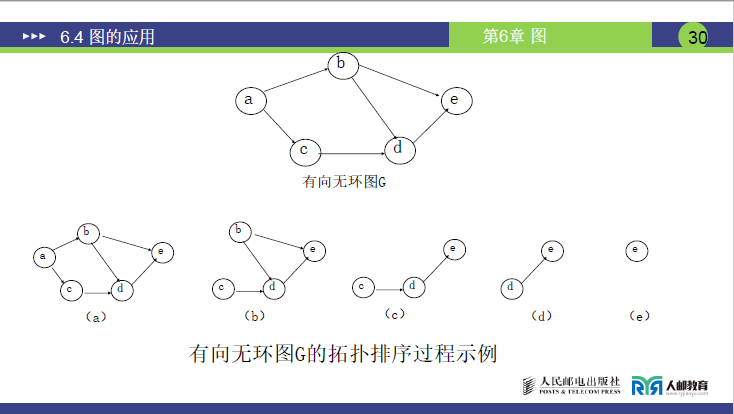
示例 2:有向无环图 G 的拓扑排序(课件 P30 图)
课件给出一个简单有向无环图 G(顶点 a、b、c、d、e),拓扑排序过程如下:
- 初始入度为 0 的顶点:a(无入边);
- 输出 a → 删除 a 的出边
<a,b>、<a,c>(图 6-30(a)→(b)); - 入度为 0 的顶点:b、c。
- 输出 a → 删除 a 的出边
- 输出 b → 删除 b 的出边
<b,d>(图 6-30(b)→(c));- 入度为 0 的顶点:c。
- 输出 c → 删除 c 的出边
<c,d>(图 6-30(c)→(d));- 入度为 0 的顶点:d。
- 输出 d → 删除 d 的出边
<<d,e>(图 6-30(d)→(e));- 入度为 0 的顶点:e。
- 输出 e → 所有顶点输出完毕,排序成功(序列:
a→b→c→d→e)。
(5)拓扑排序的核心作用
- 生成合法活动序列:为有依赖关系的活动(如课程、工程子任务)提供可执行的顺序;
- 判断 AOV 网是否有环:若排序后仍有顶点未输出,说明网中存在有向环(如 “课程 A 依赖 B,B 依赖 C,C 依赖 A”,三者无法开设),工程 / 任务无法执行。
6.4.6 关键路径(对应课件 34-42 页)
(1) AOE 网的定义与核心特征
① AOE 网的定义
- 全称:Activity On Edge Network(活动在边的网),是一种带权有向图,具体定义为:
- 顶点(Vertex):代表事件(Event),即工程进展中的某个状态(如 “开工”“地基完成”“竣工”),事件是瞬间发生的(无持续时间)。
- 弧(Arc):代表活动(Activity),即实现事件转换的具体任务(如 “地基施工”“墙体砌筑”)。
- 弧的权值(Weight):代表完成该活动所需的时间(如 “地基施工需 10 天”)。
②AOE 网的核心特征
- 源点唯一:入度为 0 的顶点(工程开始事件,如 “项目开工日”),整个工程仅一个起点。
- 汇点唯一:出度为 0 的顶点(工程结束事件,如 “项目竣工日”),整个工程仅一个终点。
- 无环:若有环,活动循环依赖,工程无法推进(需通过拓扑排序验证)。
③AOE 网实例解析
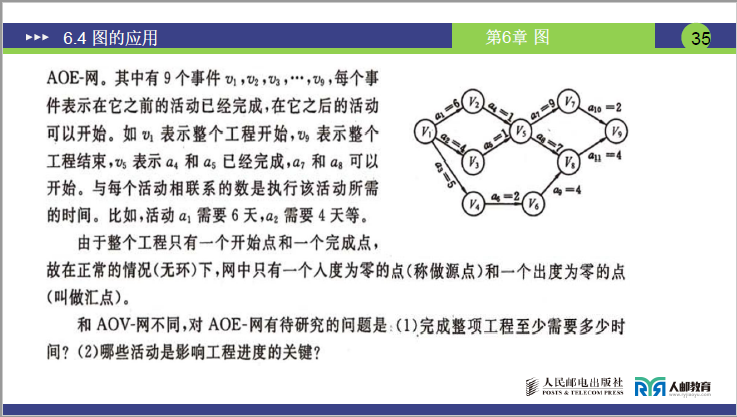
-
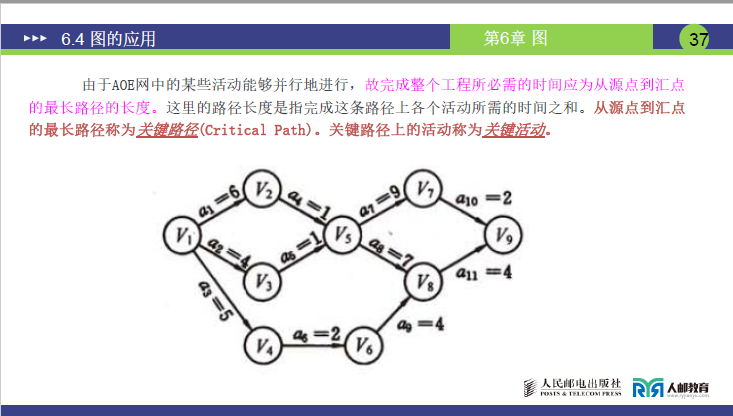
实例规模:9 个事件(V₁~V₉)、11 个活动(a₁~a₁₁),各活动时间及事件含义如下:
事件 含义(对应老师讲课解释) 关联活动(入弧:已完成活动;出弧:可开始活动) V₁ 工程开始(源点,入度 0) 出弧:a₁(V₁→V₂,6 天)、a₂(V₁→V₃,4 天)、a₃(V₁→V₄,5 天) V₂ a₁完成,a₄可开始 入弧:a₁;出弧:a₄(V₂→V₅,1 天) V₃ a₂完成,a₅可开始 入弧:a₂;出弧:a₅(V₃→V₅,1 天) V₄ a₃完成,a₆可开始 入弧:a₃;出弧:a₆(V₄→V₆,2 天) V₅ a₄、a₅完成,a₇、a₈可开始 入弧:a₄、a₅;出弧:a₇(V₅→V₇,9 天)、a₈(V₅→V₈,7 天) V₆ a₆完成,a₉可开始 入弧:a₆;出弧:a₉(V₆→V₈,4 天) V₇ a₇完成,a₁₀可开始 入弧:a₇;出弧:a₁₀(V₇→V₉,2 天) V₈ a₈、a₉完成,a₁₁可开始 入弧:a₈、a₉;出弧:a₁₁(V₈→V₉,4 天) V₉ 工程结束(汇点,出度 0) 入弧:a₁₀、a₁₁ -
举例:事件 V₅类似 “交作业前需完成‘写作业’(a₄)和‘买作业本’(a₅)”,只有这两个活动都完成,才能开始 “交作业”(a₇、a₈)相关活动。
(2)关键路径相关核心概念
为明确关键路径的判定依据,需先掌握以下概念:
| 概念 | 教材定义(课件 36 页) | 通俗解释(更易理解应用) |
|---|---|---|
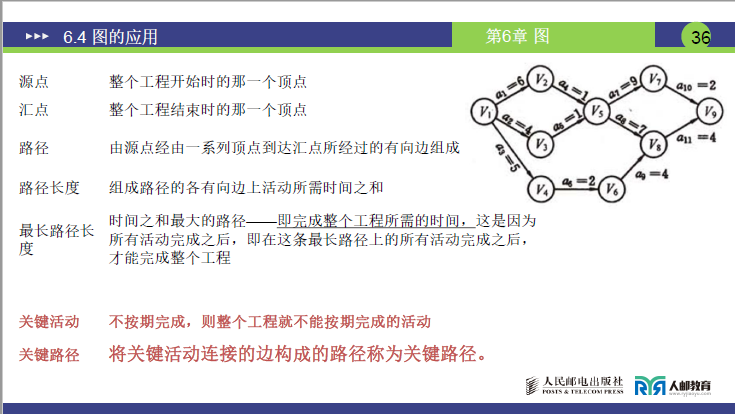
| 源点 | 整个工程开始时的顶点(入度为 0) | 工程开工日(如建大楼的 “奠基日”),无任何前置任务。 |
| 汇点 | 整个工程结束时的顶点(出度为 0) | 工程竣工日(如建大楼的 “验收通过日”),所有任务最终汇总于此。 |
| 路径 | 由源点经一系列顶点到达汇点的有向边(活动)组成的序列 | 工程的一条执行流程(如 “开工→地基→主体→竣工”)。 |
| 路径长度 | 路径上所有活动的时间之和 | 完成某条流程所需的总时间(如 “地基 10 天 + 主体 20 天 = 30 天”)。 |
| 最长路径长度 | 所有路径中长度最大的数值 | 工程最少完成时间(因并行活动需等最慢的流程完成,如 “地基 10 天、水电 8 天,需等地基完成才进主体”)。 |
| 关键活动 | 不按期完成则整个工程无法按期完成的活动 | “牵一发而动全身” 的活动(如 “主体建设延误 1 天,竣工必延误 1 天”)。 |
| 关键路径 | 从源点到汇点的最长路径;关键路径上的活动为关键活动(教材定义,课件 37 页) | 关键活动连接而成的路径(老师定义,更实用);如 “a₁→a₄→a₇→a₁₀”“a₁→a₄→a₈→a₁₁”。 |
- 强调:教材 “最长路径 = 关键路径” 的定义仅用于理论判定,实际求解需通过 “找关键活动→连关键路径” 的方式(即五变量法),更易操作。
(3) 关键路径求解:五变量法
核心思路:通过计算 5 个变量,判断每个活动的 “时间余量”(松弛时间),无余量的活动即为关键活动,进而构成关键路径。以下为变量定义、公式及实例计算。
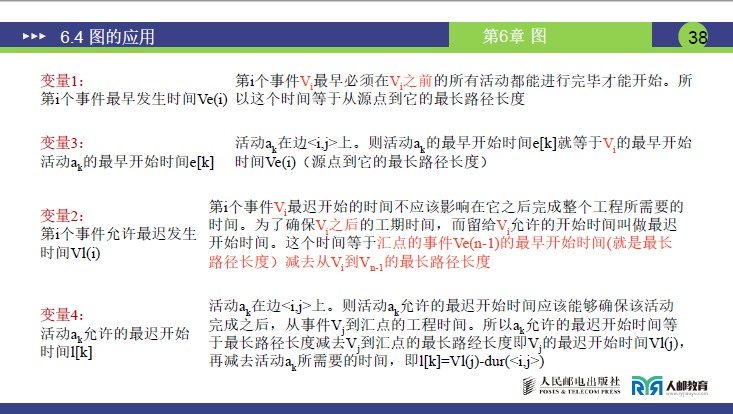
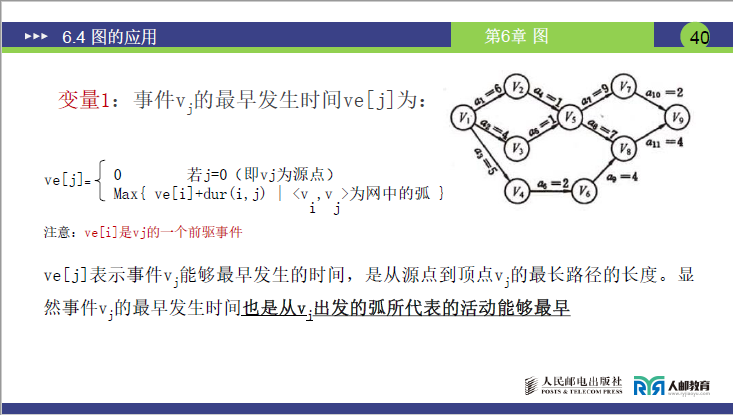
变量 1:事件的最早发生时间(Ve [j])——“事件最早能在第几天发生”
-
定义(课件 38 页):事件 Vⱼ最早发生的时间,等于从源点到 Vⱼ的最长路径长度(需等所有前置活动完成,取最慢的流程时间)。
-
公式(课件 40 页):
\[Ve[j] = \begin{cases} 0 & \text{若 } j=0 (V_j \text{为源点, 对应课件35页} V_1 ) \\ \text{Max}\{Ve[i] + dur(i, j) \mid <V_i, V_j> \text{为网中的弧} \} & \text{其他情况} \end{cases} \]- 说明:dur(i,j) 是活动 <Vi,Vj> 的持续时间;Ve[i] 是 Vⱼ的前驱事件 Vᵢ的最早发生时间。
-
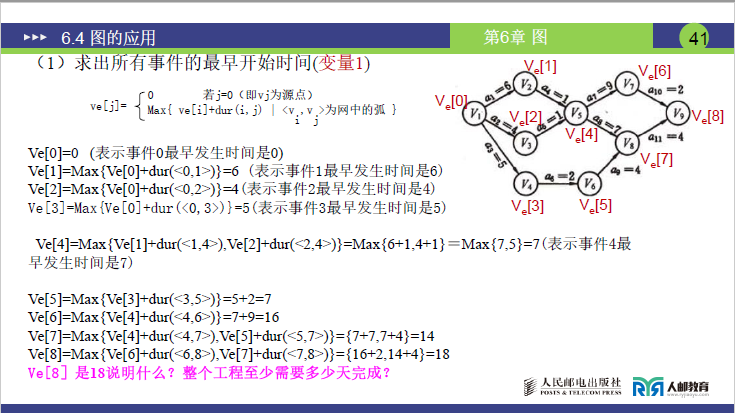
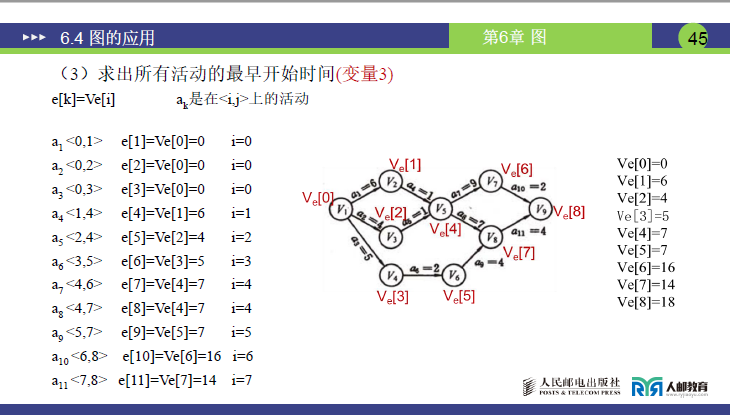
实例计算(对应课件 40-41 页,事件编号按课件 0~8 对应 V₁~V₉):
- Ve [0](V₁,源点)= 0(公式规定)
- Ve [1](V₂)= Max {Ve [0] + dur (0,1)} = 0 + 6 = 6(仅 1 条前置路径:V₁→V₂)
- Ve [2](V₃)= Max {Ve [0] + dur (0,2)} = 0 + 4 = 4(仅 1 条前置路径:V₁→V₃)
- Ve [3](V₄)= Max {Ve [0] + dur (0,3)} = 0 + 5 = 5(仅 1 条前置路径:V₁→V₄)
- Ve [4](V₅)= Max {Ve [1]+dur (1,4), Ve [2]+dur (2,4)} = Max {6+1, 4+1} = Max {7,5} = 7(2 条前置路径:V₂→V₅、V₃→V₅,取最长)
- Ve [5](V₆)= Max {Ve [3] + dur (3,5)} = 5 + 2 = 7(仅 1 条前置路径:V₄→V₆)
- Ve [6](V₇)= Max {Ve [4] + dur (4,6)} = 7 + 9 = 16(仅 1 条前置路径:V₅→V₇)
- Ve [7](V₈)= Max {Ve [4]+dur (4,7), Ve [5]+dur (5,7)} = Max {7+7, 7+4} = Max {14,11} = 14(2 条前置路径:V₅→V₈、V₆→V₈,取最长)
- Ve [8](V₉,汇点)= Max {Ve [6]+dur (6,8), Ve [7]+dur (7,8)} = Max {16+2, 14+4} = Max {18,18} = 18
-
关键结论:汇点 Ve [8]=18,即整个工程最少需 18 天完成(强调:考试中求工程最少时间,直接算汇点的 Ve 值即可)。
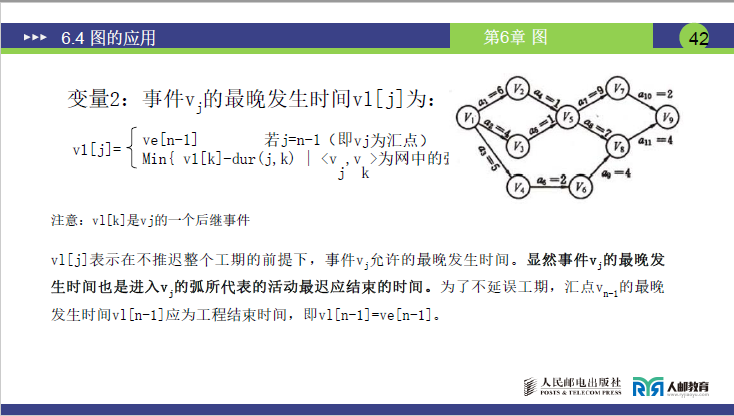
变量 2:事件的最晚发生时间(Vl [j])——“事件最晚能在第几天发生,且不延误工期”
-
定义(课件 38 页):事件 Vⱼ最晚发生的时间,需保证后续活动能在工程最少时间内完成(即不影响汇点的最早发生时间)。
-
公式(课件 43 页):
\[Vl[j] = \begin{cases} Ve[n-1] & \text{若 } j=n-1 (V_j \text{为汇点, } n \text{为事件总数}) \\ \text{Min}\{Vl[k] - dur(j, k) \mid <V_j, V_k> \text{ 为网中的弧} \} & \text{其他情况} \end{cases} \]- 说明:Vl[k] 是 Vⱼ的后继事件 Vₖ的最晚发生时间;需取 Min 是为了避免后续活动时间不足(如 “后续活动最晚需 18 天完成,若本事件太晚,后续活动无法按时结束”)。
-
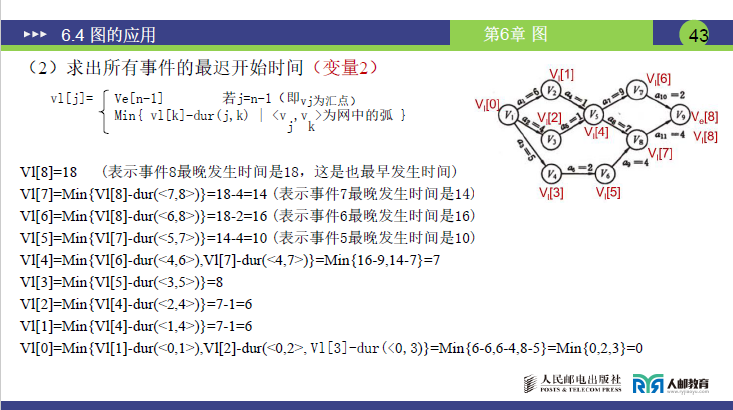
实例计算(对应课件 43 页,汇点 Vl [8]=Ve [8]=18,逆序计算):
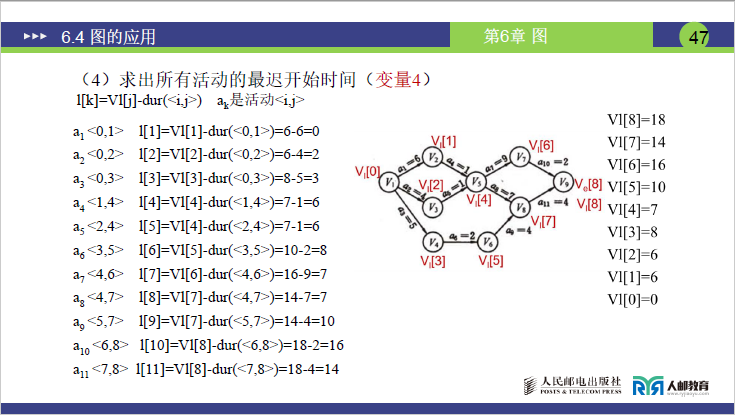
- Vl [8](V₉,汇点)= Ve [8] = 18(公式规定,工期不延误,汇点最晚与最早发生时间一致)
- Vl [7](V₈)= Min {Vl [8] - dur (7,8)} = 18 - 4 = 14(仅 1 条后继路径:V₈→V₉)
- Vl [6](V₇)= Min {Vl [8] - dur (6,8)} = 18 - 2 = 16(仅 1 条后继路径:V₇→V₉)
- Vl [5](V₆)= Min {Vl [7] - dur (5,7)} = 14 - 4 = 10(仅 1 条后继路径:V₆→V₈)
- Vl [4](V₅)= Min {Vl [6]-dur (4,6), Vl [7]-dur (4,7)} = Min {16-9, 14-7} = Min {7,7} = 7(2 条后继路径:V₅→V₇、V₅→V₈,取最小)
- Vl [3](V₄)= Min {Vl [5] - dur (3,5)} = 10 - 2 = 8(仅 1 条后继路径:V₄→V₆)
- Vl [2](V₃)= Min {Vl [4] - dur (2,4)} = 7 - 1 = 6(仅 1 条后继路径:V₃→V₅)
- Vl [1](V₂)= Min {Vl [4] - dur (1,4)} = 7 - 1 = 6(仅 1 条后继路径:V₂→V₅)
- Vl [0](V₁,源点)= Min {Vl [1]-dur (0,1), Vl [2]-dur (0,2), Vl [3]-dur (0,3)} = Min {6-6, 6-4, 8-5} = Min {0,2,3} = 0
-
举例:事件 V₃(Vl [2]=6)的含义是 “V₃最晚需在第 6 天发生,若超过 6 天,后续活动 V₃→V₅(1 天)完成时间会超过 V₅的最晚发生时间 7 天,导致工期延误”。
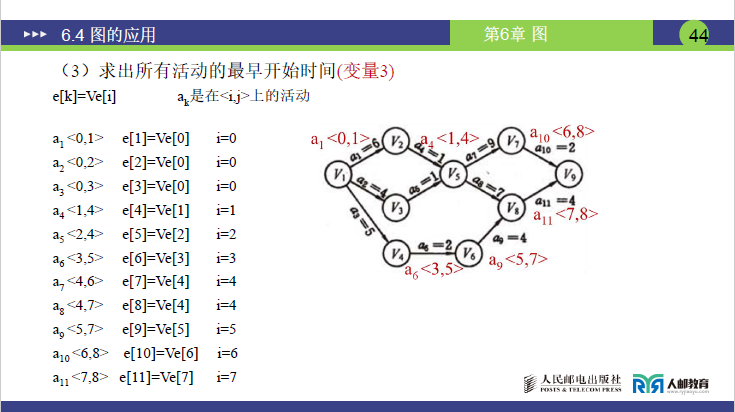
变量 3:活动的最早开始时间(e [k])——“活动最早能在第几天开始”
-
定义(课件 38 页):活动 aₖ(对应弧<Vi,Vj>)的最早开始时间,等于其起点事件 Vᵢ的最早发生时间(Vᵢ发生后,活动即可开始)。
-
公式(课件 44-45 页):e[k]=Ve[i](aₖ对应弧<Vi,Vj>,i 为起点事件编号)
-
实例计算(对应课件 45 页,11 个活动):
活动 对应弧 e [k] = Ve [i](i 为起点事件编号) 计算结果 a₁ <0,1>(V₁→V₂) Ve[0] 0 a₂ <0,2>(V₁→V₃) Ve[0] 0 a₃ <0,3>(V₁→V₄) Ve[0] 0 a₄ <1,4>(V₂→V₅) Ve[1] 6 a₅ <2,4>(V₃→V₅) Ve[2] 4 a₆ ❤️,5>(V₄→V₆) Ve[3] 5 a₇ <4,6>(V₅→V₇) Ve[4] 7 a₈ <4,7>(V₅→V₈) Ve[4] 7 a₉ <5,7>(V₆→V₈) Ve[5] 7 a₁₀ <6,8>(V₇→V₉) Ve[6] 16 a₁₁ <7,8>(V₈→V₉) Ve[7] 14
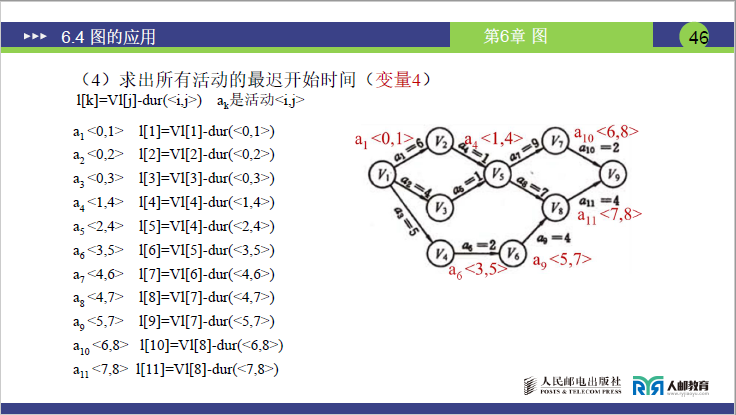
变量 4:活动的最晚开始时间(l [k])——“活动最晚能在第几天开始,且不延误工期”
-
定义(课件 38 页):活动 aₖ(对应弧<Vi,Vj>)的最晚开始时间,需保证其终点事件 Vⱼ能在最晚时间发生(即 Vⱼ的 Vl [j] 减去活动持续时间)。
-
公式(课件 46 页):l[k]=Vl[j]−dur(i,j)(aₖ对应弧<Vi,Vj>,j 为终点事件编号,dur (i,j) 为活动时间)
-
实例计算(对应课件 46-47 页,11 个活动):
活动 对应弧 l [k] = Vl [j] - dur (i,j)(j 为终点编号,dur 为活动时间) 计算结果 a₁ <0,1>(V₁→V₂) Vl[1] - 6(dur=6) 6-6=0 a₂ <0,2>(V₁→V₃) Vl[2] - 4(dur=4) 6-4=2 a₃ <0,3>(V₁→V₄) Vl[3] - 5(dur=5) 8-5=3 a₄ <1,4>(V₂→V₅) Vl[4] - 1(dur=1) 7-1=6 a₅ <2,4>(V₃→V₅) Vl[4] - 1(dur=1) 7-1=6 a₆ ❤️,5>(V₄→V₆) Vl[5] - 2(dur=2) 10-2=8 a₇ <4,6>(V₅→V₇) Vl[6] - 9(dur=9) 16-9=7 a₈ <4,7>(V₅→V₈) Vl[7] - 7(dur=7) 14-7=7 a₉ <5,7>(V₆→V₈) Vl[7] - 4(dur=4) 14-4=10 a₁₀ <6,8>(V₇→V₉) Vl[8] - 2(dur=2) 18-2=16 a₁₁ <7,8>(V₈→V₉) Vl[8] - 4(dur=4) 18-4=14
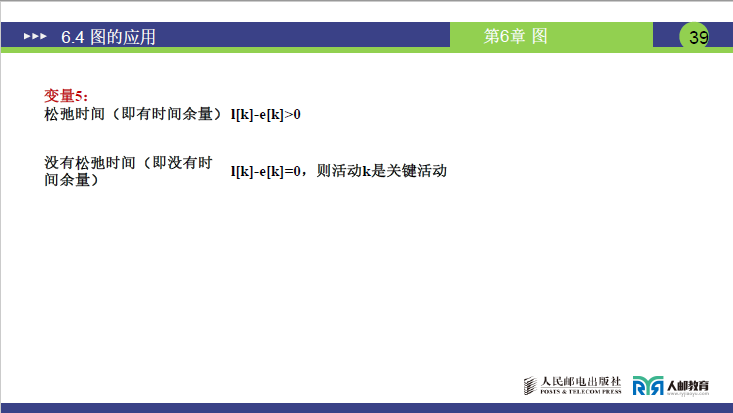
变量 5:松弛时间(Slack Time)——“活动的时间余量”
-
定义(课件 39 页):活动 aₖ的时间余量,即最晚开始时间与最早开始时间的差值,公式为:松弛时间=l[k]−e[k]。
-
核心判断规则(课件 39 页):
- 若松弛时间 = 0:活动无时间余量,延误则工期延误→关键活动。
- 若松弛时间 > 0:活动有时间余量,延误不影响工期→非关键活动。
-
实例计算(11 个活动的松弛时间与关键活动判定):
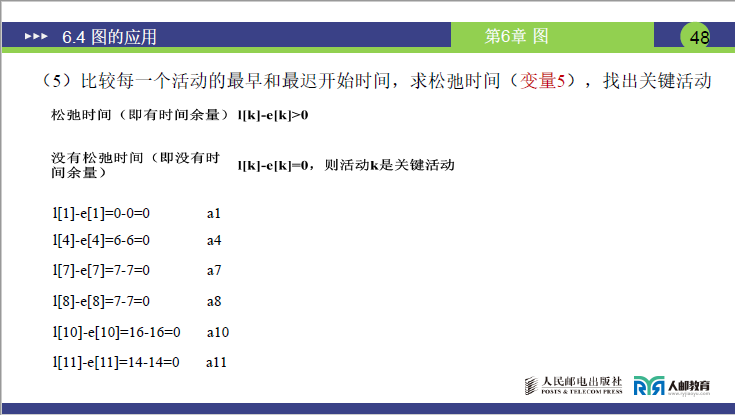
活动 e[k] l[k] 松弛时间 = l [k]-e [k] 是否为关键活动 a₁ 0 0 0 是 a₂ 0 2 2 否 a₃ 0 3 3 否 a₄ 6 6 0 是 a₅ 4 6 2 否 a₆ 5 8 3 否 a₇ 7 7 0 是 a₈ 7 7 0 是 a₉ 7 10 3 否 a₁₀ 16 16 0 是 a₁₁ 14 14 0 是
(4) 关键路径最终确定
1.关键路径定义
由关键活动首尾连接形成的路径(即无时间冗余的活动构成的路径),对应课件 49 页的 AOE 网图中红色标注的路径。
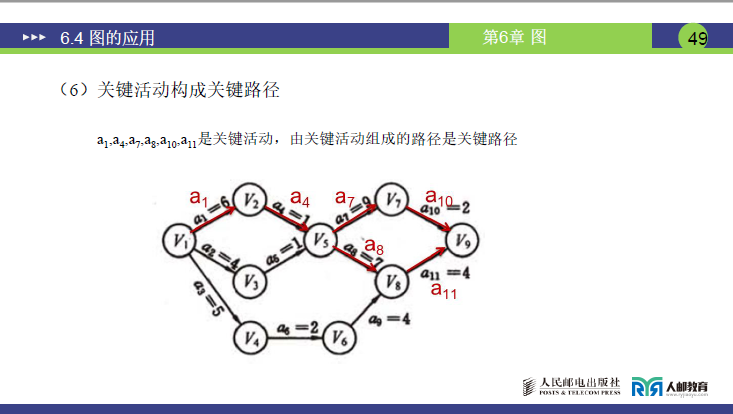
2.关键路径示例(结合课件 49 页图)
根据关键活动a1、a4、a7、a8、a10、a11,可构成两条关键路径:
- \(v_0 \xrightarrow{a_1} v_1 \xrightarrow{a_4} v_4 \xrightarrow{a_7} v_6 \xrightarrow{a_{10}} v_8 \quad (\text{路径长度: } 6+1+9+2=18) ;\)
- \(v_0 \xrightarrow{a_1} v_1 \xrightarrow{a_4} v_4 \xrightarrow{a_7} v_6 \xrightarrow{a_{10}} v_8 \quad (\text{路径长度: } 6+1+7+4=18) ;\)。
3.关键路径意义
- 关键路径的长度 = 总工期(18 天),是源点到汇点的最长路径;
- 关键活动是 “瓶颈”:任何关键活动延误 1 天,总工期必延误 1 天;
- 非关键活动有冗余:如a2可延误 2 天,a3可延误 3 天,不影响总工期。
(5)关键路径求解总结

完整的关键路径求解需分 4 步,确保无环(若拓扑排序无法输出所有顶点,说明网中有环,工程无法完成):
- 步骤 1:拓扑排序:对 AOE 网进行拓扑排序,得到拓扑序列(如v0→v1→v2→v3→v4→v5→v6→v7→v8);
- 步骤 2:计算事件最早发生时间Ve(j):按拓扑序列从源点到汇点,依次计算每个事件的Ve(j)(用 max);
- 步骤 3:计算事件最迟发生时间Vl(j):按逆拓扑序列从汇点到源点,依次计算每个事件的Vl(j)(用 min);
- 步骤 4:判断关键活动与关键路径:对每个活动ak=<<i,j>,若e[k]=l[k](即Ve(i)+dur(i,j)=Vl(j)),则为关键活动;将关键活动连接成关键路径。
总结
- 关键路径的核心是 “找无时间冗余的活动”,依赖 5 个变量的逐步计算;
- 总工期由汇点的Ve(n−1)决定,关键活动延误则总工期延误;
- 求解前需先拓扑排序,避免网中有环导致工程无法推进。
参考资料:教材《数据结构 C 语言 第 3 版》 数据结构考研指导(基础篇) 、数据结构考研指导(基础篇) 视频课程|赵海英

 浙公网安备 33010602011771号
浙公网安备 33010602011771号