第4章串、数组和广义表
第4章 串、数组和广义表
4.1 串的定义
4.1.1 串的定义
- 文字定义:由零个或多个字符组成的有限序列。
- 符号化表示:记作 S=′a1a2⋯an′(n≥0),其中 S 为串名,a1a2⋯an为串值,n 为串的长度。
关于“串的定义”的考试要点:
- 严谨性要求: 考试中回答定义时必须严谨。核心点是“由零个或多个字符组成”。老师特别强调,很多同学容易忽略“零个”的情况,只回答“若干个”,这是不完整的,“零个”字符也是一个合法的串。
- 两种表示形式(满分答法): 考试中如果能同时给出以下两种形式,通常是满分标准:
- 文字定义: “由零个或多个字符组成的有限序列”。
- 符号化表示: S=′a1a2⋯an′(n≥0)。其中n 可以等于 0,表示空串。
4.1.2 串的术语
| 术语 | 课件定义 | 【老师补充讲解】 |
|---|---|---|
| 串名 | 串的标识(如上述 S) | 通常用大写字母(如 、)表示,用于区分不同串,无实际字符意义。 |
| 串值 | 用单引号括起来的字符序列 | 单引号是串值的 “标识符号”,不属于串的组成部分;例如 ′BEI′ 中,串值为 “BEI”。 |
| 长度 | 串中字符的数目 | 长度最小为 0(空串),最大为有限值;需注意 “空格” 算一个字符(如 ′BEIJING′ 长度为 8)。 |
| 空串 | 含零个字符的串(记为 ∅) | 空串 ≠ 空格串:空格串是由 1 个或多个 “键盘 space 键” 组成的串(如 长度为 3),属于非空串。 |
| 空格串 | 由一个或多个空格组成的串 | 空格是合法字符,需计入长度;例如课件中 d=′BEIJING′ 因含 1 个空格,长度比 c=′BEIJING′ 多 1。 |
| 子串 | 串中任意个连续的字符组成的子序列 | ① 关键属性:“连续”—— 非连续字符序列不属于子串(如 ′BEIJING′ 中 “BJ” 不是子串);② 任意范畴:“零个或多个字符”(零个子串即空串,多个字符需连续)。 |
| 字符在串的位置 | 字符在序列中的序号 | 序号有两种计数方式:① 从 1 开始(常用,如 ′BE**I′ 中 “B” 位置为 1);② 从 0 开始(编程中常见,如 ′BE**I′ 中 “B” 位置为 0),需结合场景判断。 |
| 子串在串的位置 | 子串的第一个字符在串中的位置 | 例如 ′JING′ 在 ′BEIJING′ 中位置为 4(从 1 计数),因第一个字符 “J” 在原串第 4 位;注意不是子串最后一个字符的位置。 |
| 相等 | 当且仅当两个串的值相等 | 需同时满足 “长度相等”+“对应位置字符完全一致”;例如 ′ABC′\=′ABD′(第 3 位字符不同),′AB′\=′ABC′(长度不同)。 |
关于“串的术语”详解:
- 串值 (String Value): 注意是用单引号括起来的字符序列(例如
'abc'),这是表征串值的标准方式。 - 空串 (Empty String): 长度为 0,不含任何字符。
- 空格串 (Blank String): 千万别混淆! 空格串不是空串。它是由一个或多个“空格字符”(键盘上的 Space 键)组成的串。空格也是字符,占用长度。
- 子串 (SubString) 的核心定义:
- 定义:串中任意个、连续的字符组成的子序列。
- 关键点 1 “任意个”: 这里的“任意”范围是零个或零个以上。零个字符(空串)也是任意串的子串。
- 关键点 2 “连续”: 这是判断是否为子串的最核心标准。必须是原串中连续在一起的一段字符,不能跳着取。
- 位置 (Position):
- 字符位置: 指的是序号。注意序号可能从 0 开始(计算机习惯),也可能从 1 开始(人类习惯),具体看题目约定。
- 子串位置: 指的是该子串在主串中第一个字符出现的位置(首字符索引)。
4.1.3 串的举例
课件示例:a=′BEI′、b=′JING′、c=′BEIJING′、d=′BEIJING′
-
长度:分别为 3、4、7、8;
-
子串关系:a 和 b 均是 c 和 d 的子串;
-
位置:a 在 c 和 d 中位置均为 1;b 在 c 中位置为 4,在 d 中位置为 5(因 d 中 “BEI” 后有 1 个空格,“J” 在第 5 位);
-
相等判断:a、b、c、d 彼此不相等(长度或串值不同)。
-
空格的影响:d 因含 1 个空格,长度比 c 多 1,且 b 在 d 中的位置比在 c 中多 1,需注意空格对 “位置” 和 “长度” 的影响;
-
考试常见题型:给定多个串,判断子串关系、计算长度或位置,需重点关注空格字符。
4.1.4 串的比较
串的比较: 通过组成串的字符之间的比较来进行的。
给定两个串:X='x1x2...xn' 和Y='y1y2...yn' ,则:
-
当n=m且 x1=y1, ..., xn=yn 时,称 X=Y;
-
当下列条件之一成立时,称 X < Y:
- n<m且 xi=yi(1 ≤ i ≤ n);
- 存在 k ≤ min(m,n),使得 xi=yi(1 ≤ i ≤ k-1)且 xk<yk。
串比较的核心规则(通俗理解):
-
对应字符比较: 两个串(串 1 和串 2)从第一个位置开始,两两比较相同位置上的字符。
-
停止时机: 一旦发现相同位置上的字符不一样,立即停止比较。
-
大小判定: 停止位置上,哪个字符的 ASCII 码大,所在的那个串就大。
-
ASCII差 = 0 →字符相等。
-
ASCII差 < 0 → 前者小。
-
ASCII差 > 0 → 前者大。
-
-
重要误区: 串的大小绝不是比长度! 并不是字符串越长就越大。例如 "A..." 很长,但只要第一个字符比对方小,整个串就小。
形式化定义详解(考研/科研基础): 老师强调要掌握这种“形式化语言”,这是将文字描述转化为公式推理的基础。
- 相等 (\(X=Y\)): 必须满足两个条件:① 长度相等 (n=m);② 对应位置字符完全一致。
- 小于 ( X < Y) 的两种情况:
- 情况 1(前缀相同,X 短):X的所有字符都和 Y 的前 n 个字符一样,但 X 比 Y短 (n<m)。
- 例子: X='ABC', Y='ABCD'。X 是 Y 的前缀,且更短,所以 X< Y 。
- 情况 2(出现字符差异): 在第k个位置首次出现不同 (xk≠_y_k),而在 k 之前的所有字符都相同。如果此时 xk<yk,则 X< Y 。
- 例子 1: X='ABC', Y='ZHYK'。第 1 个字符 'A' < 'Z',直接判定 X< Y。
- 例子 2: X='ABCDEFG...'(很长), Y='ZHY'。第 1 个字符 'A' < 'Z',依然是 X< Y,与长度无关。
- 情况 1(前缀相同,X 短):X的所有字符都和 Y 的前 n 个字符一样,但 X 比 Y短 (n<m)。
4.1.5 串与线性表的区别
| 对比维度 | 串 | 线性表 |
|---|---|---|
| 数据对象 | 仅限定为字符集(如 ASCII 字符、Unicode 字符) | 无限制(可是数字、结构体、字符等任意数据类型) |
| 基本操作对象 | 以 “串的整体” 为单位(如查找子串、插入子串、删除子串) | 以 “单个元素” 为单位(如查找单个元素、插入单个元素、删除单个元素) |
为什么把“串、数组、广义表”放在一章?
- 这一章展示了从线性到非线性,再到统一范式的演变。
- 串: 简单的线性结构。
- 数组: 一维数组是线性,二维及以上是非线性,但结构规整。
- 广义表: 是本章的升华。它可以包含异构数据(原子或子表),能将线性结构(串、数组)和非线性结构(树、图)统一到一个框架(范式)下进行表示。
考试要求:
- 串: 掌握 BF 和 KMP 算法。
- 数组: 掌握两类操作——压缩(特殊矩阵、稀疏矩阵)和表征(地址计算)。
- 广义表: 理解其递归定义和基本运算(Head/Tail)。
4.2串的类型定义、存储及其运算
- 知识点 1:串的表示(即串的存储结构):3 种常用存储方法,解决 “如何高效存放字符序列”;
- 知识点 2:串的模式匹配:串的核心运算(考试必考),重点讲解 BF 算法,引入 KMP 算法思想。
4.2.1知识点 1:串的表示(串的存储结构)
串的存储需平衡 “空间利用率” 与 “操作效率”
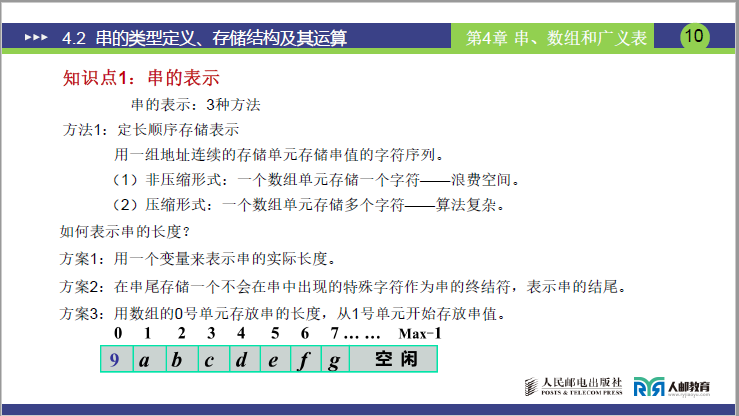
(1)方法1:定长顺序存储表示
-
基本思想:用一组地址连续的存储单元依次存储串的字符,存储长度预先固定(如数组大小
Max),本质是 “静态顺序存储”。 -
两种存储形式:
存储形式 实现逻辑 课件示例(串 "abcdef",长度 6)优缺点 非压缩形式 1 个存储单元仅存 1 个字符(如 char S[Max])数组下标 1-6 存 'a'-'f',每个下标占 1 字节优点:操作简单(字符定位直接, S[i]即第i个字符);
缺点:空间浪费(如 4 字节单元存 1 字节 ASCII 字符)压缩形式 1 个存储单元存多个字符(如 4 字节存 4 个 ASCII 字符) 1 个单元存 'a','b','c','d',另 1 个单元存'e','f'(补空格)优点:空间利用率高;
缺点:插入 / 删除需拆分 / 合并单元,算法复杂(如删除'c'需移动后续字符) -
如何表示串的长度?
| 方案 | 实现逻辑 | 课件示例(串"abcdef",长度 6) |
适用场景 |
|---|---|---|---|
| 方案 1:变量记录长度 | 额外定义len变量存储串长(如char S[100]; int len=6;) |
S[1]='a', S[2]='b', ..., S[6]='f',len=6 |
需频繁获取长度的场景,但需额外空间存len |
| 方案 2:串尾终结符 | 串尾存特殊字符(如 C 语言的'\0')标识结束 |
S[1]='a', ..., S[6]='f', S[7]='\0' |
无需额外变量,但获取长度需遍历(时间复杂度O(n)),特殊字符可能与串值冲突 |
| 方案 3:0 号单元存长度(最常用) | 数组 0 号单元存串长,字符从 1 号单元开始存放 | S[0]=6(长度),S[1]='a', S[2]='b', ..., S[6]='f' |
考试 / 工程首选:获取长度O(1),字符定位直接,无额外空间浪费 |
- 定长顺序存储的核心是 “地址连续”,本质是利用线性表的顺序存储特性存储字符序列,理解即可,无需深入复杂实现。
- 串长度表示的三种方案中,方案 3(0 号单元存长度,1 号单元存字符)是考试及实际应用中最常用的方式,后续模式匹配算法(BF、KMP)均默认此方案。
(2)方法2:堆分配存储表示
①基本思想( “动态存储” 核心)
在内存 “堆区” 开辟动态连续空间存储串值,用 “符号表” 管理串的元信息(串名、位置、长度),解决定长存储 “长度固定” 的缺陷。
②核心组成(课件 11 页表格清晰展示)
| 组成部分 | 功能 | 课件示例(串"BEIJING") |
|---|---|---|
| 符号表 | 符号表的作用是 “索引”,通过记录串变量名与串值位置的对应关系,快速定位和管理串值,类似 “目录与文件” 的对应关系。 | 列:位置(堆区地址0x1234)、串名(S)、长度(7) |
| 串值存储区 | 堆分配存储的核心是 “动态分配”,空间可可逆利用(即无需使用时可释放回系统),解决了定长存储 “空间固定、易浪费或溢出” 的问题。 | 地址0x1234-0x123A存'B','E','I','J','I','N','G' |
③操作逻辑
- 建串:向系统申请堆区空间(如
malloc(7*sizeof(char))),写入字符序列,在符号表新增一行记录; - 删串:释放堆区空间(
free(地址)),从符号表删除对应记录; - 扩容:若串值变长,重新申请更大堆区空间(
realloc),复制原串值后释放原空间。
④优势
“动态分配” 使其适合串长不确定的场景(如用户输入的文本),但需手动管理内存(避免内存泄漏)。
(3)方法3:串的块链存储表示
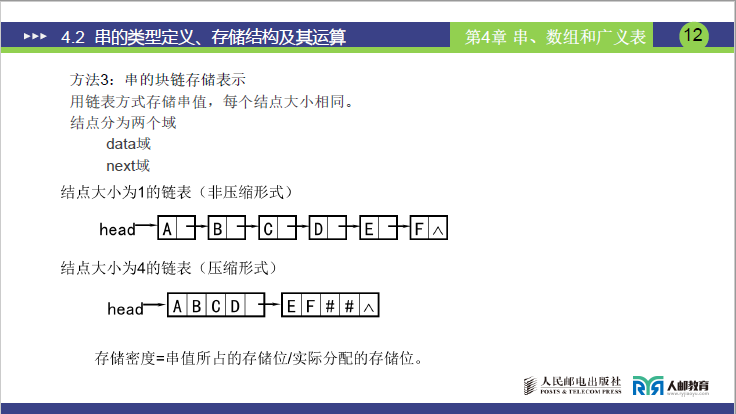
- 基本思想:借鉴线性表的链式存储,用链表存储串值,每个节点含数据域(data) 和指针域(next),指针域指向后续节点。
- 两种节点模式( “非压缩模式常用”)
| 节点模式 | 实现逻辑 | 课件示例(串"BEIJING") |
关键指标:压缩密度 |
|---|---|---|---|
| 非压缩模式(常用) | 1 个节点的 data 域存 1 个字符 | 7 个节点,分别存'B','E','I','J','I','N','G',每个节点含data+next |
压缩密度 = 字符空间 /(字符空间 + 指针空间),如指针 4 字节、字符 1 字节,密度 = 1/(1+4)=20% |
| 压缩模式 | 1 个节点的 data 域存多个字符(如 4 个) | 2 个节点:第 1 个存'B','E','I','J',第 2 个存'I','N','G'(补空格) |
密度更高(如 4 字符 + 4 指针,密度 = 4/(4+4)=50%),但插入 / 删除需拆分节点 |
-
存储密度: 存储密度 = 串值所占的存储位 / 实际分配的存储位。
指实际字符所占空间与结点总空间(data 域 + next 域)的比值,也叫 “压缩力度”,密度越高,空间利用率越高。
4.2.2串的模式匹配
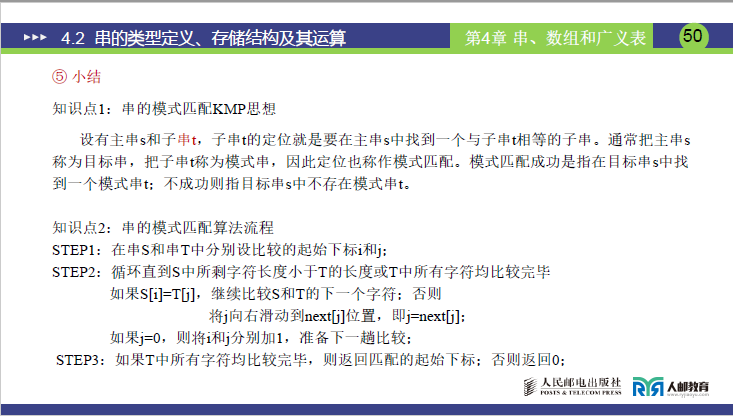
(1)模式匹配定义与特点
-
模式匹配: 给定主串S="s1s2...sn"和模式 T="t1t2...tm",在S中寻找T的过程称为模式匹配。如果匹配成功,返回T在S中的位置,如果匹配失败,返回0。
- 主串与模式串的符号约定:主串通常用 S 表示,模式串(即要查找的子串)常用 T 或 P(P 为 “Pattern” 的缩写,意为 “模式”)。
-
基本假设: 假设串采用顺序存储结构,串的长度存放在数组的0号单元,串值从1号单元开始存放。
-
模式匹配问题的特点:
- (1) 算法的一次执行时间不容忽视:问题规模通常很大,常常需要在大量信息中进行匹配。
- (2) 算法改进所取得的积累效益不容忽视:模式匹配操作经常被调用,执行频率高。
-
介绍两种方法:
- 方法1:BF算法
- 方法2:KMP算法
-
匹配结果的明确规定:
- 成功:返回模式串在主串中第一次出现的第一个字符的位置(而非最后一个字符位置)。
- 失败:统一返回 0(而非 - 1,需注意与编程中的 “索引习惯” 区分,考试严格按此标准)。
-
约定(与严老师考试要求一致):
- 存储结构:仅用 “顺序存储”(不用块链存储),字符连续存放,无后继指针。
- 串长度存储:串的长度存于 0 号单元,1 号单元开始存实际字符(如 S [0] 存主串长度 n,S [1]~S [n] 存主串字符;T [0] 存模式串长度 m,T [1]~T [m] 存模式串字符)。
-
模式匹配的重要性:是串运算中最核心、考试每年必考的内容(选择题、计算题均会涉及),CS 专业甚至有专门研究串的硕博方向,数据结构课程中需通过匹配算法掌握串的实用价值。
(2)模式匹配---BF算法 (Brute-Force)
①BF算法基本思想
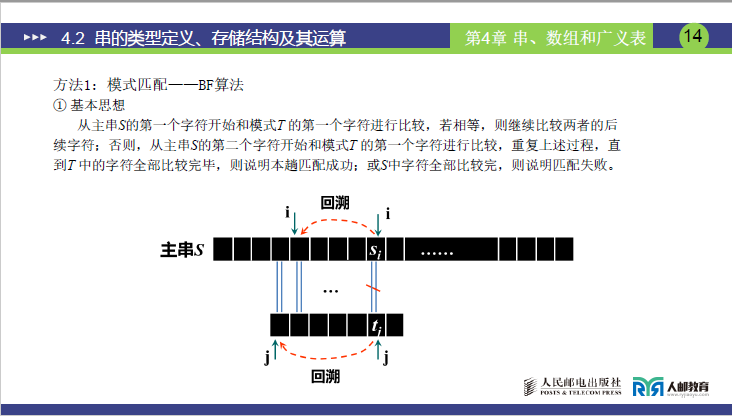
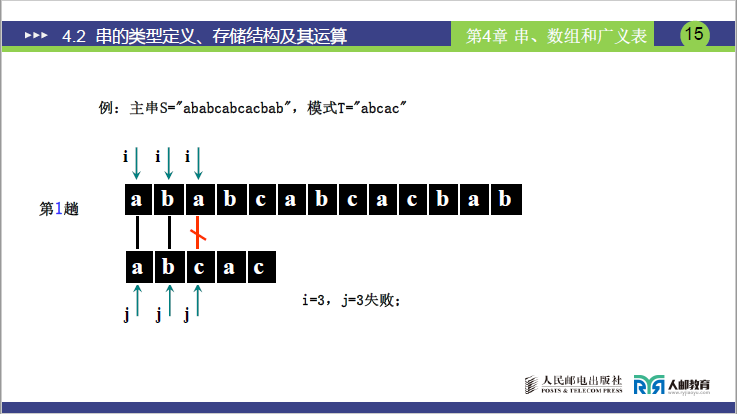
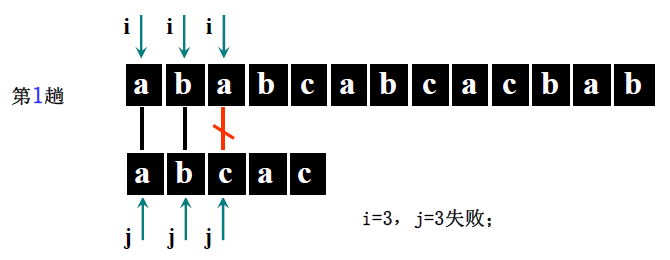
- 基本思想: 从主串S的第一个字符开始和模式T的第一个字符进行比较,若相等,则继续比较两者的后续字符;否则,从主串S的第二个字符开始和模式T的第一个字符进行比较,重复上述过程,直到T中的字符全部比较完毕,则说明本趟匹配成功;或S中字符全部比较完,则说明匹配失败。核心特征是 “回溯”。
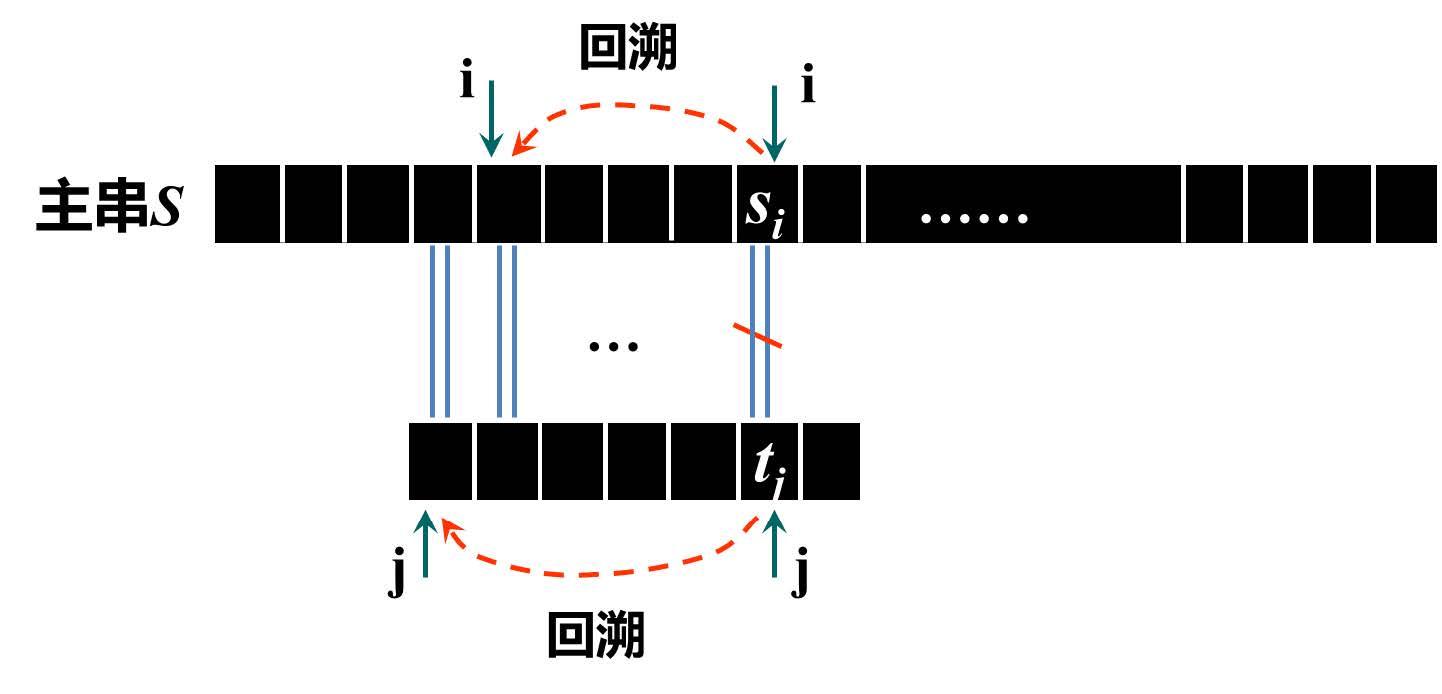
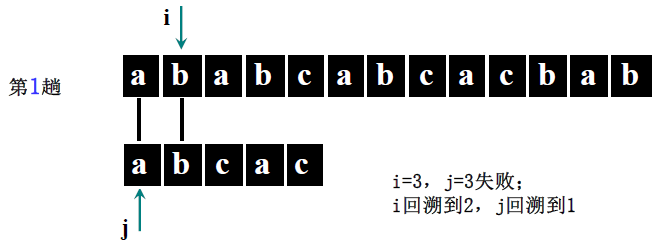
- 回溯的具体操作:当 S [i]≠T [j](某一位不匹配)时,主串指针 i 需回溯到 “当前比较起始位置的下一个位置”(即 i = 初始 i+1),模式串指针 j 回溯到 “起始位置 1”,重新开始新一轮比较。
- 通俗理解:类似 “逐字比对,错了就退一步重新比”,逻辑简单但效率较低,因未利用已比对过的字符信息。
详细步骤:
主串 S = “ababc”(S [0]=5,S [1]='a'、S [2]='b'、S [3]='a'、S [4]='b'、S [5]='c'),模式串 T = “abca”(T [0]=4,T [1]='a'、T [2]='b'、T [3]='c'、T [4]='a')。
- 第一趟(i=1,j=1):S [1]='a'==T [1]='a'(i=2,j=2)→ S [2]='b'==T [2]='b'(i=3,j=3)→ S [3]='a'≠T [3]='c' → 回溯 i=3-3+2=2,j=1;
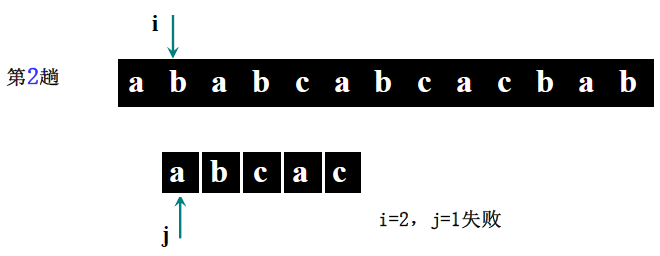
- 第二趟(i=2,j=1):S [2]='b'≠T [1]='a' → 回溯 i=2-1+2=3,j=1;
- 第三趟(i=3,j=1):S [3]='a'==T [1]='a'(i=4,j=2)→ S [4]='b'==T [2]='b'(i=5,j=3)→ S [5]='c'==T [3]='c'(i=6,j=4)→ S [6] 不存在(i>5)→ 回溯 i=6-4+2=4,j=1;
- 第四趟(i=4,j=1):S [4]='b'≠T [1]='a' → 回溯 i=4-1+2=5,j=1;
- 第五趟(i=5,j=1):S [5]='c'≠T [1]='a' → 回溯 i=5-1+2=6,j=1;
- 第六趟(i=6>5):主串比对完,返回 0(此案例实际匹配失败,讲课案例表述中主串可能为 “ababcabca”,需以步骤逻辑为准,核心是理解回溯过程)。
②BF 算法过程
-
Step1:初始化起始下标 ——i=1(主串 S 的起始比较位置,因 S [0] 存长度),j=1(模式串 T 的起始比较位置,因 T [0] 存长度)。
-
Step2:循环比较(终止条件:i>S [0] 或 j>T [0]):
-
2.1 若 S [i] == T [j]:i += 1,j += 1(继续比对下一位);
-
2.2 若 S [i] != T [j]:i = i - j + 2(主串回溯到 “当前趟起始位置 + 1”,如当前 i=3、j=3,回溯后 i=3-3+2=2),j=1(模式串回溯到起始);
-
-
Step3:结果判断:
-
若 j > T [0](模式串全部比对完成):匹配成功,返回 “i - T [0]”(即模式串在主串中第一次出现的起始位置,如 i=8、T [0]=3,返回 8-3=5);
-
若 i > S [0](主串比对完仍未匹配):返回 0,匹配失败。
-
(3)BF 算法性能分析
| 性能情况 | 触发条件 | 比较次数 | 时间复杂度 | 老师举例 |
|---|---|---|---|---|
| 最好情况 | 每趟匹配 “第一个字符即不相等”(T[1]与S[i]始终不等) |
总次数≈n(n-m+1趟,每趟 1 次,成功时加m次) |
O(n+m) |
S="abcde",T="xbc":T[1]='x'与S[1]='a'、S[2]='b'等均不等,仅比较n-m+1=3次 |
| 最坏情况 | 每趟匹配 “前m-1个字符相等,最后 1 个不等” |
总次数≈n×m(n-m+1趟,每趟m次) |
O(nm) |
S="aaaaa",T="aaab":前 3 个'a'均相等,第 4 个'a'!='b',每趟比较 4 次,共 3 趟,总 12 次 |
-
性能量化分析:
-
最好情况时间复杂度:O (n + m)。
例:主串 S=“abcdefgh”(n=8),模式串 T=“xyz”(m=3),每趟仅比较 T [1](第一个字符)就不匹配,共需比较 n - m + 1 = 8-3+1=6 次,接近 O (n),加上成功匹配的 m 次,总复杂度为 O (n + m)。
-
最坏情况时间复杂度:O (n×m)。
例:主串 S=“aaaaaab”(n=7,末尾为 'b'),模式串 T=“aaab”(m=4,末尾为 'b')。每趟需比较 m 次(前 3 个 'a' 匹配,第 4 个不匹配),共需 n - m + 1 = 7-4+1=4 趟,总比较次数 = 4×4=16 次,接近 O (n×m)。
-
-
BF 算法的核心缺陷:主串指针 i 的 “回溯” 导致重复比对。例如主串已比对到第 100 位,因模式串最后一位不匹配,需回溯到第 50 位重新比对,浪费已有的比对信息,效率低下。
(4)为什么BF算法时间性能低?
- 原因: 在每趟匹配不成功时存在大量回溯,没有利用已经部分匹配的结果。
- 思考: 如何在匹配不成功时主串 不回溯?
- 思路: 主串不回溯,模式就需要向右滑动一段距离。
- 解决方法: 模式匹配——KMP算法。
(5)如何再匹配不成功时主串不回溯?
主串不回溯,模式就需要向右滑动一段距离。
解决方法:模式匹配---KMP算法
- KMP 算法的核心目标:解决 BF 算法中 “主串回溯” 的缺陷,实现主串指针 i 不回溯,仅通过调整模式串指针 j 的位置,继续后续比对,大幅提升效率。
- KMP 算法的重要性:提出后对串模式匹配领域影响深远,是严老师大纲明确要求掌握的算法,其核心优势是 “利用已比对的部分匹配信息,让模式串尽可能向右滑动更远的距离”,避免重复比对。
- 后续学习重点:需掌握 KMP 算法的核心思想(部分匹配表)、next 函数的定义与计算、KMP 匹配过程,以及 nextval 函数(next 函数的改进)。
4.2.3模式匹配---KMP算法
(1)本节课知识定位
- 章节归属:属于第 4 章 “串、数组和广义表” 中4.2 串的类型定义、存储结构及其运算的知识点 2:串的模式匹配,是对 BF 算法的进阶改进,核心讲解KMP 算法的原理、
next[j]函数及优化方案,课件明确其为串运算的核心考点。 - 内容承接:本节课前需掌握串的 3 种存储结构(课件知识点 1)及 BF 模式匹配算法(课件知识点 2 的方法 1),KMP 算法针对 BF 算法 “主串指针回溯” 的缺陷进行优化。
(2)BF 算法(课件铺垫内容,KMP 算法的改进前提)
①基本思想
从主串S的第一个字符开始与模式串T的第一个字符逐位比较,相等则继续比对后续字符;若不等,主串指针i回溯至当前趟起始位置的下一位,模式串指针j回溯至 1,重复直至匹配成功或主串遍历完毕。
②算法性能
设主串长度为n,模式串长度为m,匹配成功时存在两种极端情况:
- 最好情况:失配均发生在模式串第 1 个字符,时间复杂度为O(n+m);
- 最坏情况:失配均发生在模式串最后一个字符,存在大量冗余回溯,时间复杂度为O(n×m)。
(3)KMP 算法(课件 P30-60,本节课核心内容)
①分析过程
A.算法分析过程
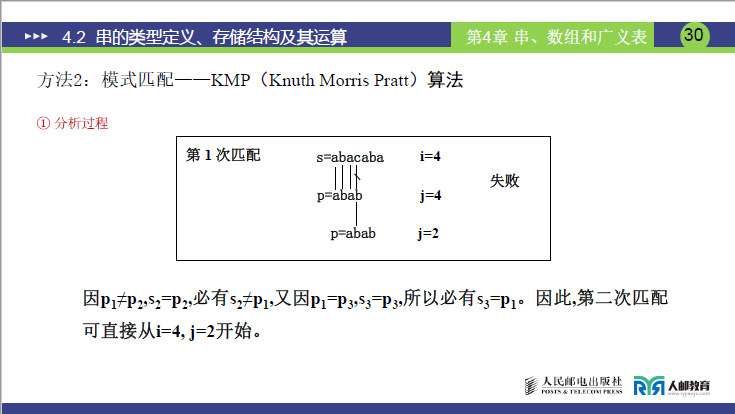
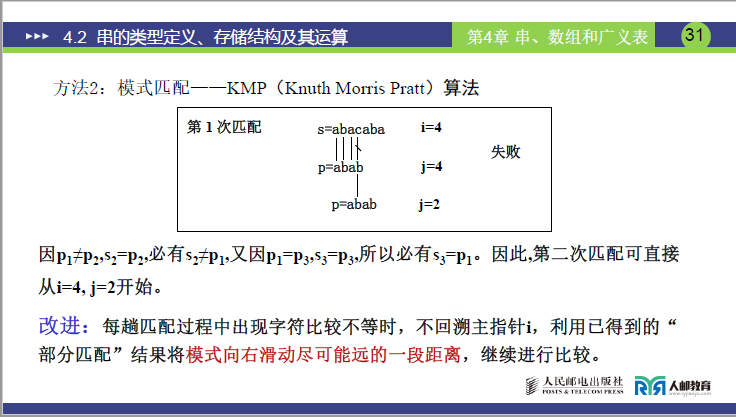
以主串s=abacaba、模式串p=abab为例,首次匹配在、时失配:
- BF 算法的缺陷:主串i回溯至 2,模式串j回溯至 1,重复无效比对;
- KMP 改进逻辑:利用 “部分匹配” 信息推导 —— 因p1≠p2且s2=p2,故s2≠p1;又因p1=p3且s3=p3,故s3=p1,因此无需回溯主串i,仅将模式串j调整至 2,直接从、开始下一轮比对,核心是主串指针不回溯。
B.核心推导
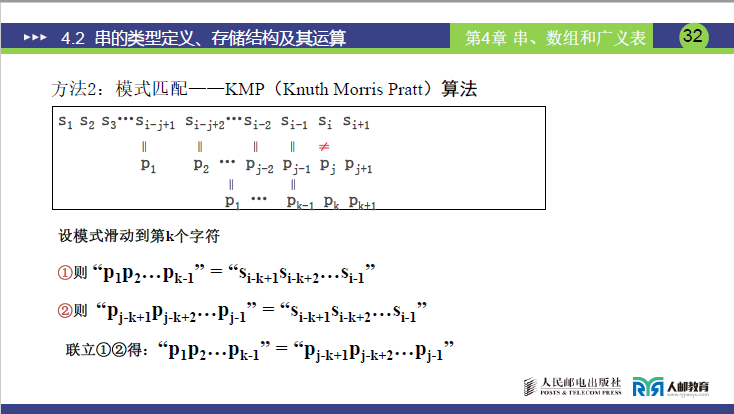
当主串s[i]\≠p[j]时,前j−1位已完全匹配,联立以下两个等式可确定模式串滑动的新起点k:
-
p1p2…pk−1=si−k+1si−k+2…si−1
-
pj−k+1pj−k+2…pj−1=si−k+1si−k+2…si−1
联立得:
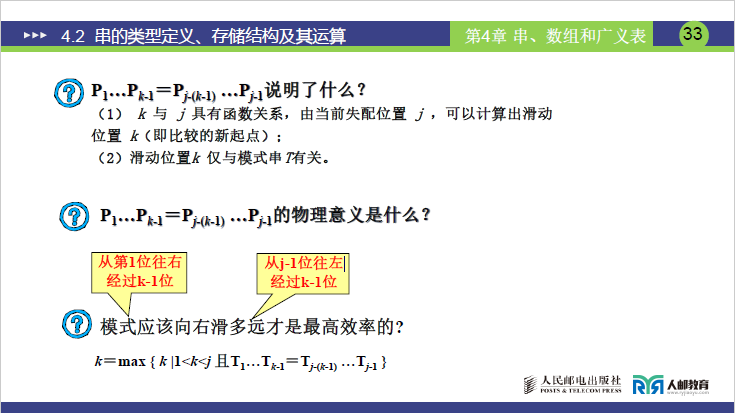
p1p2…pk−1=pj−k+1pj−k+2…pj−1,且k的取值仅与模式串p相关,与主串s无关。
C.next[j]函数定义
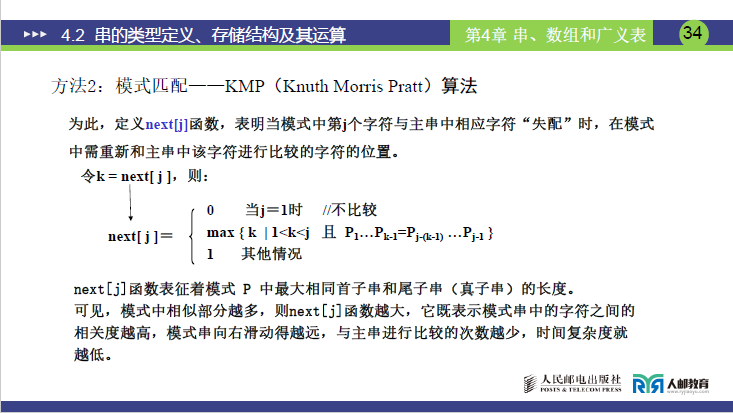
next[j]表示模式串第j个字符失配时,需重新与主串当前字符比对的模式串字符位置,数学定义为:
其物理意义为模式串前j−1位中最大相同首尾真子串的长度,值越大,模式串滑动距离越远,比对次数越少。
②分析结论

③.next[j]计算方法
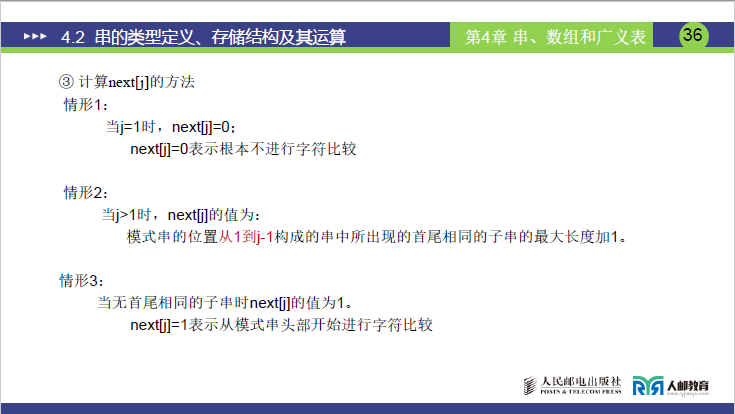
课件将计算规则分为 3 种情形:
- 情形 1:j=1时,next[j]=0(硬性规定);
- 情形 2:j>1时,若模式串p[1..j−1]存在首尾相同子串,取其最大长度l,则next[j]=lsubstringmax+1;
- 情形 3:j>1且无首尾相同子串时,next[j]=1。
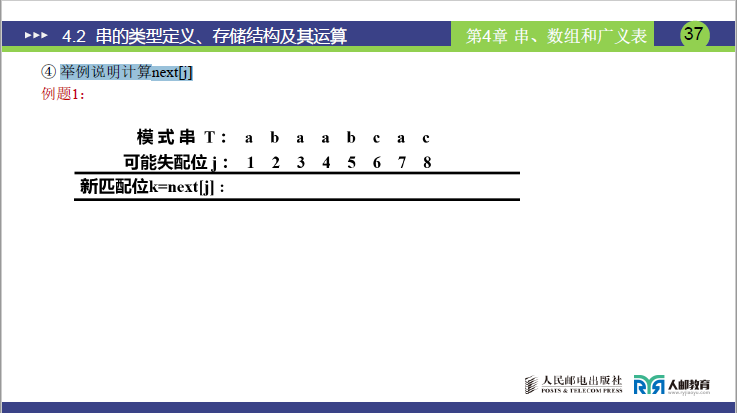
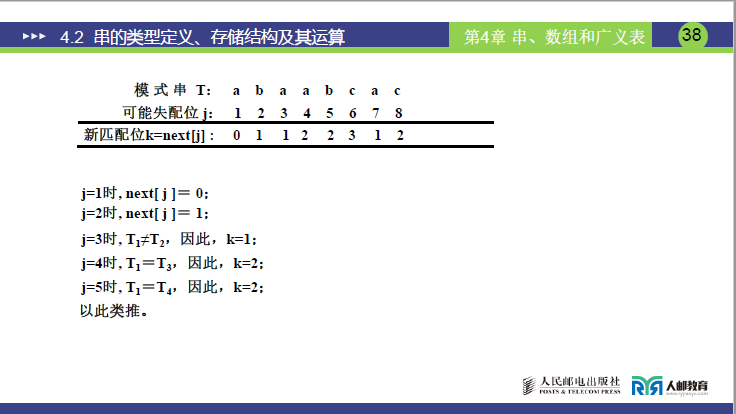
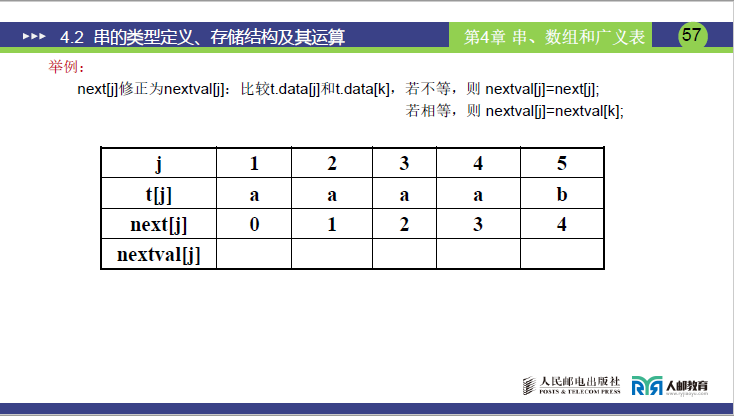
④举例说明计算next[j]
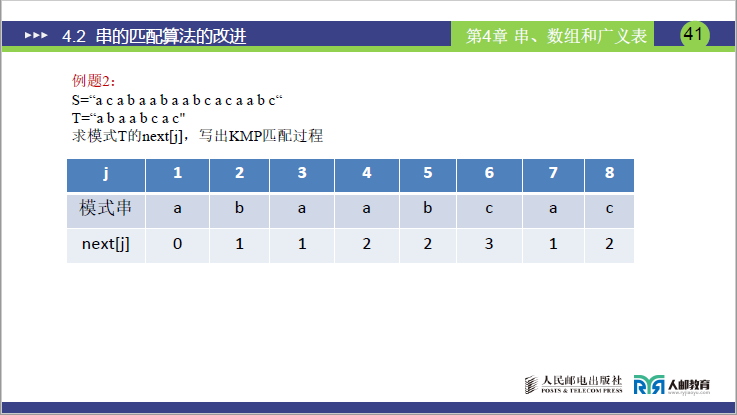
next[j]计算三原则(回顾)
- j=1时:
next[1]=0(规定:失配时不比较,直接调整主串指针); - j>1时:若T[1..j−1]有最长首尾串(长度lsubstringmax),则next[j]=lsubstringmax+1;
- 无最长首尾串时:
next[j]=1(从模式串头部重新比较)。
逐j推导
| j(失配位) | 模式串T[j] | T[1..j−1](已匹配前缀) | 最长首尾串(真子串) | 长度lsubstringmax | next[j]=lsubstringmax+1 | 补充说明 |
|---|---|---|---|---|---|---|
| 1 | a | 空串 | 无 | - | 0 | 规定值,失配时不比较 |
| 2 | b | a | 无(仅 1 个字符,无真子串) | 0 | 1 | 前缀只有 a,无首尾相等,回退到 1 |
| 3 | a | ab | 无(a≠b) | 0 | 1 | 前缀 ab 的首 A≠尾 b,回退到 1 |
| 4 | a | aba | a(首 1 个a=尾 1 个a) | 1 | 2 | 前缀 aba 的首 a = 尾 a,最长长度 1,回退到 2 |
| 5 | b | abaa | a(首 1 个a=尾 1 个a) | 1 | 2 | 前缀 ABAA 的首 A = 尾 A,无更长首尾串,回退到 2 |
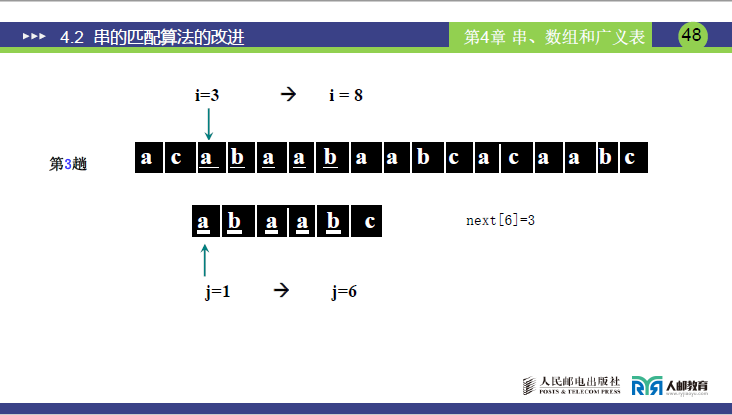
| 6 | c | abaab | ab(首 2 个ab=尾 2 个ab) | 2 | 3 | 前缀 abaab 的首 ab = 尾 ab,最长长度 2,回退到 3 |
| 7 | a | abaabc | 无(a≠c) | 0 | 1 | 前缀 abaabc 的尾 c≠首 a,回退到 1 |
| 8 | c | abaabca | a(首 1 个a=尾 1 个a) | 1 | 2 | 前缀 abaabca 的首 a = 尾 a,回退到 2 |
- 最终结果:
next[j] = [0,1,1,2,2,3,1,2]
KMP 匹配过程
匹配规则(老师反复强调)
- 主串指针i不回溯,仅调整模式串指针j;
- 若S[i]=T[j]:i=i+1,j=j+1;
- 若S[i]\=T[j]:j=next[j],若j=0则i=i+1、j=1(重新开始)。
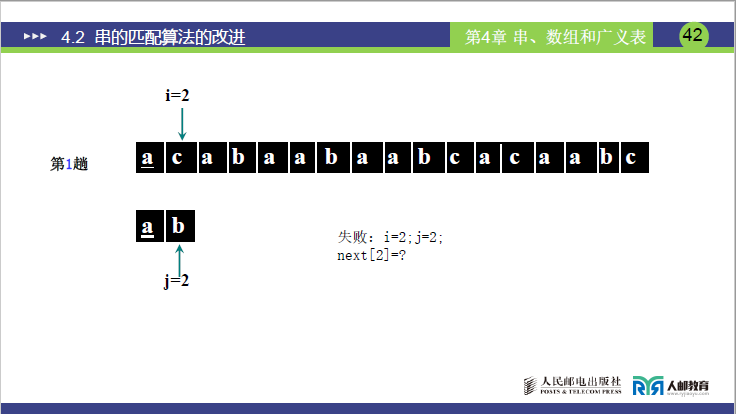
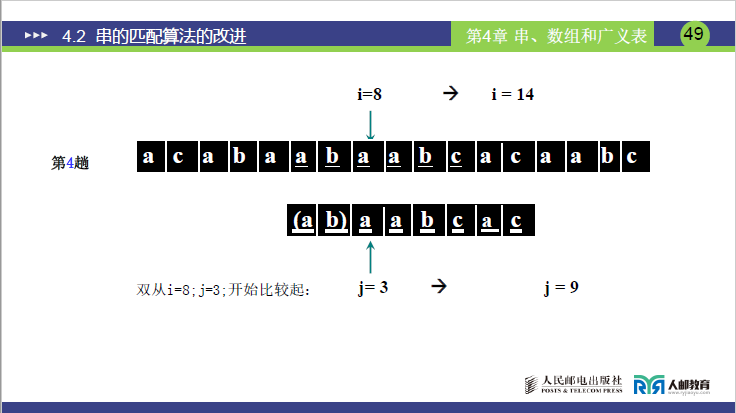
逐趟推导(对应课件 42-49 页每趟图)
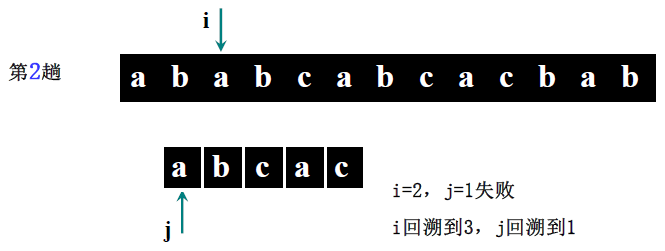
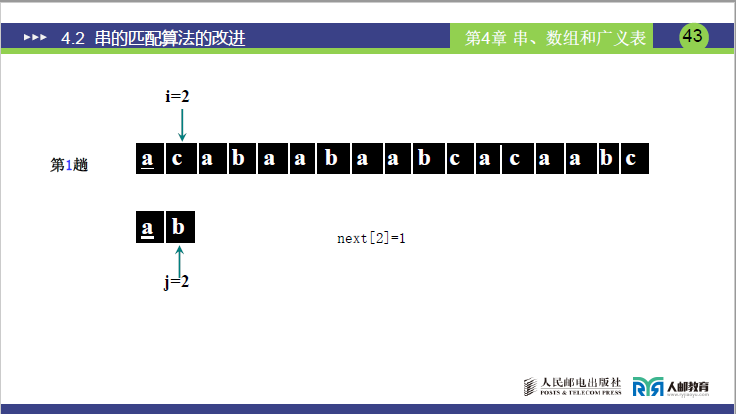
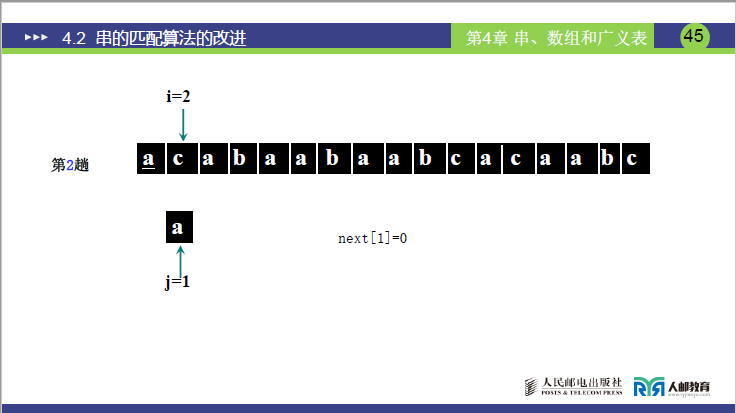
第 1 趟:初始i=2,j=2
- 比较:S[2]=c vs T[2]=b → 失配;
- 查
next[2]=1,调整j=1(i保持 2); - 继续比较:S[2]=c vs T[1]=a → 仍失配;
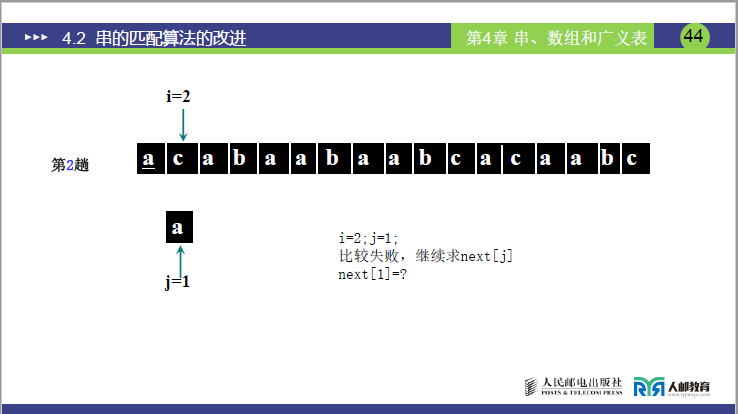
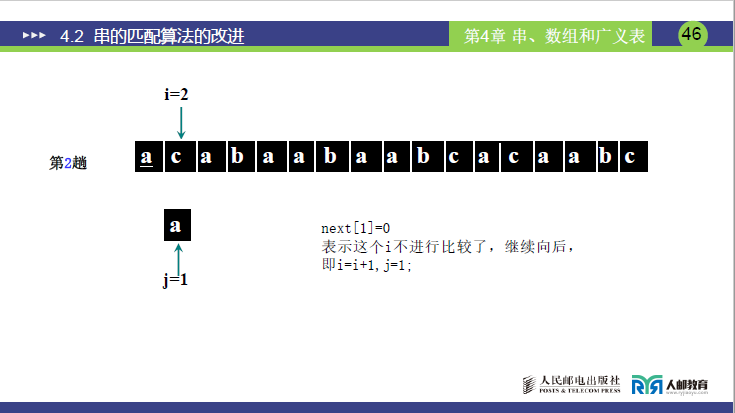
- 老师补充:j=1失配时查
next[1]=0,按规则i=i+1=3,j=1(主串后移,模式串从头开始)。
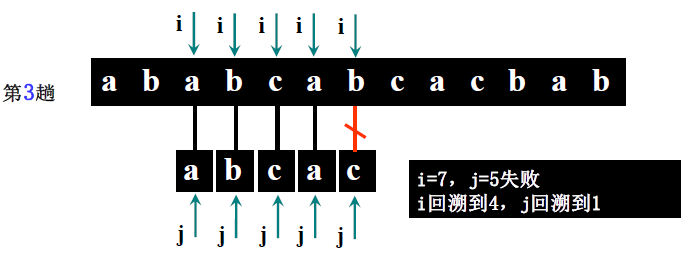
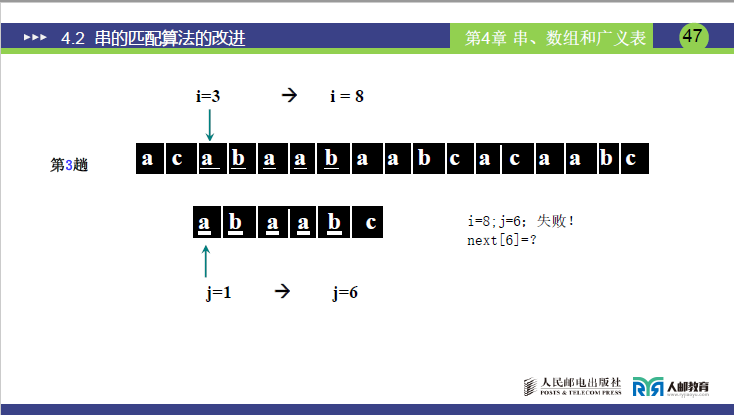
第 2 趟:i=3,j=1
- 比较:S[3]=a vs T[1]=a → 匹配,i=4,j=2;
- 后续匹配:S[4]=b=T[2]=b(i=5,j=3)→ S[5]=a=T[3]=a(i=6,j=4)→ S[6]=a=T[4]=a(i=7,j=5)→ S[7]=b=T[5]=b(i=8,j=6);
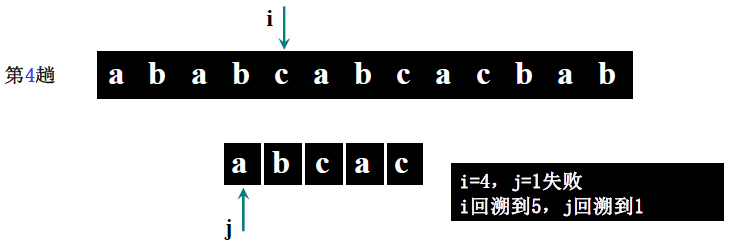
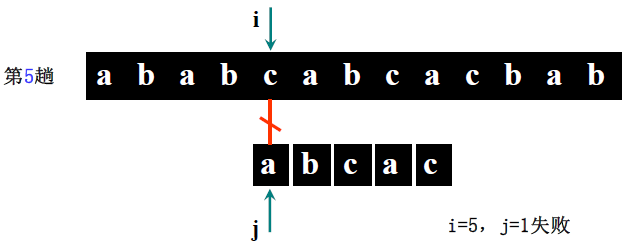
- 失配:S[8]=b vs T[6]=c → 失配;
- 查
next[6]=3,调整j=3(i保持 8)。
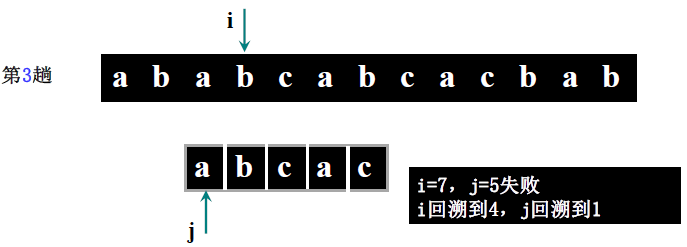
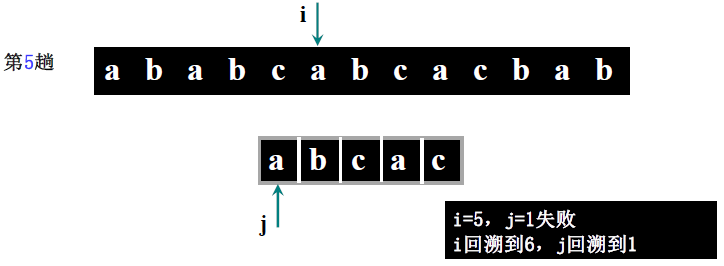
第 3 趟:i=8,j=3
- 比较:S[8]=b vs T[3]=a → 失配;
- 查
next[3]=1,调整j=1(i保持 8); - 比较:S[8]=b vs T[1]=a → 失配;
- 调整:j=0 → i=9,j=1。
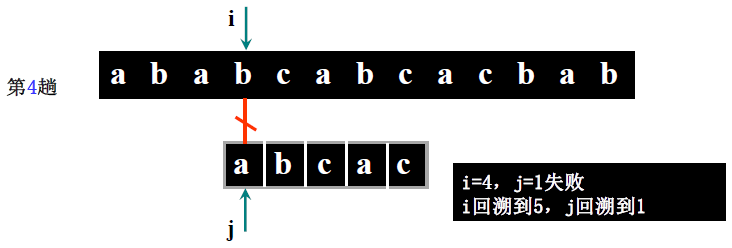
第 4 趟:i=9,j=1
-
逐字符匹配:
S[9]=a=T[1]=a(i=10,j=2)→ S[10]=a=T[2]=b?→ 不,重新核对:
实际主串:S[9]=a、S[10]=b、S[11]=c、S[12]=a、S[13]=c、S[14]=a、S[15]=a、S[16]=b、S[17]=c;
模式串:T[1]=a、T[2]=b、T[3]=a、T[4]=a、T[5]=b、T[6]=c、T[7]=a、T[8]=c;
-
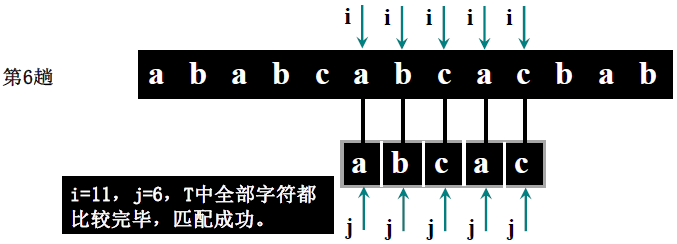
最终匹配:当i=17、j=8时,S[17]=c=T[8]=c,模式串全部匹配完毕;
-
匹配成功位置:主串起始位置为i−8+1=17−8+1=10(老师强调:起始位置需用i减去模式串长度再加 1)。
⑤小结
⑥练习
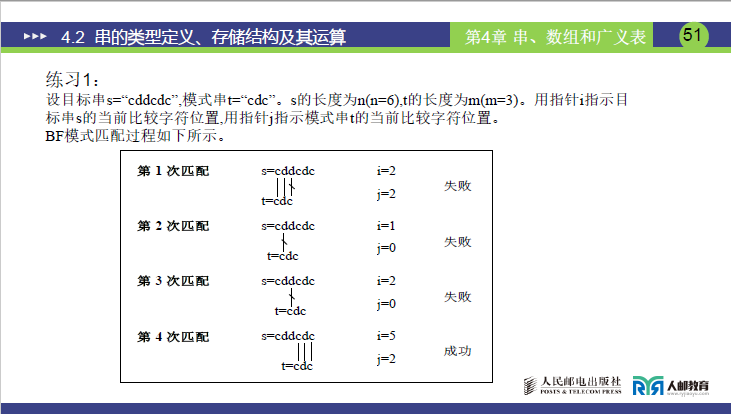
- 题目:目标串s="cddcdc"(n=6),模式串t="cdc"(m=3),用 BF 算法匹配。
- BF 核心:主串指针i回溯(每次失配i=i−j+2),模式串指针j回溯到 1。
- 匹配过程:
- 第 1 趟:i=1,j=1(c=c)→ i=2,j=2(d=d)→ i=3,j=3(d≠c)→ 失配,i=2,j=1;
- 第 2 趟:i=2,j=1(d≠c)→ 失配,i=3,j=1;
- 第 3 趟:i=3,j=1(d≠c)→ 失配,i=4,j=1;
- 第 4 趟:i=4,j=1(c=c)→ i=5,j=2(d=d)→ i=6,j=3(c=c)→ 匹配成功。
- 结论:BF 算法需 4 趟匹配,效率低于 KMP。
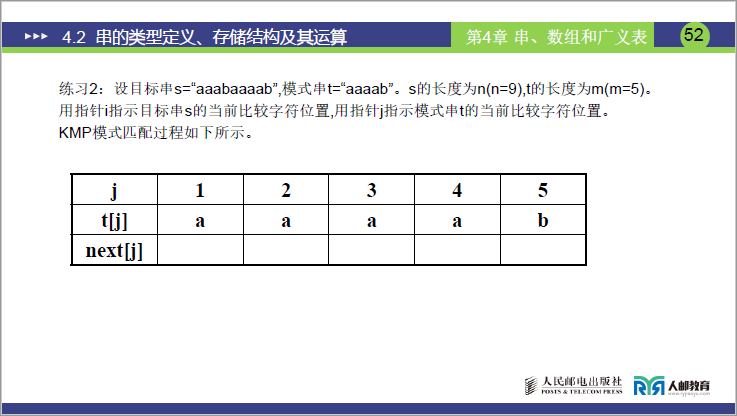
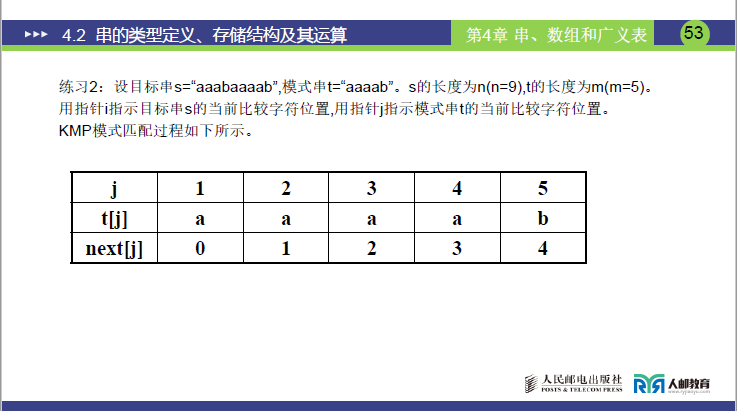
- 题目:目标串s="aaabaaaab"(n=9),模式串t="aaaab"(m=5),求
next[j]。 - 计算结果:
next[j] = [0,1,2,3,4]; - 强调:此例正是
next[j]有缺陷的典型场景,后续需优化为nextval[j]。
next[j]的缺陷与nextval[j]优化
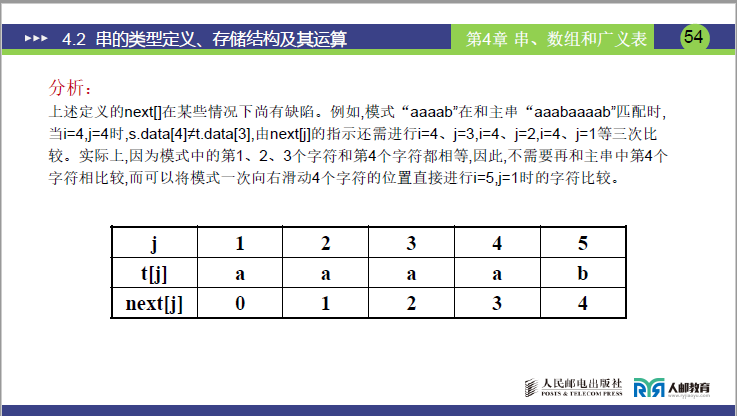
next[j]的缺陷(课件页码 52-54,图:缺陷示意图)
(1)缺陷场景(老师举例分析)
- 已知:主串S="aaabaaaab",模式串T="aaaab"(next[j]=[0,1,2,3,4]);
- 失配过程:i=4,j=4(S[4]=b vs T[4]=a)→ 失配;
- 查
next[4]=3,比较S[4]=b vs T[3]=a → 失配; - 查
next[3]=2,比较S[4]=b vs T[2]=a → 失配; - 查
next[2]=1,比较S[4]=b vs T[1]=a → 失配;
- 查
- 分析:因T[4]=T[3]=T[2]=T[1]=a,与S[4]=b必然失配,多次调整j属于无效操作,需优化
next[j]。
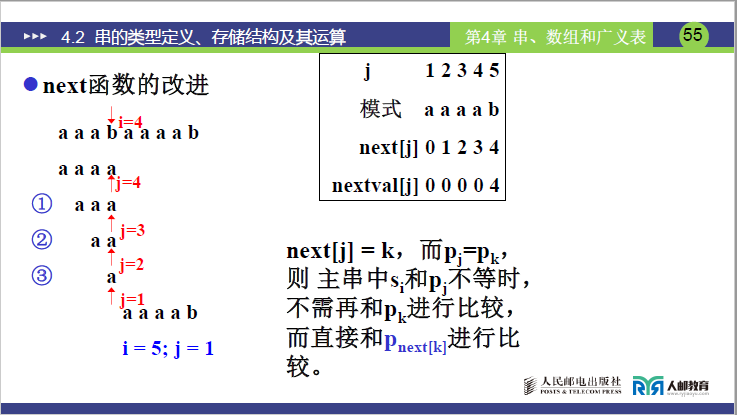
(2)缺陷本质
- 当
next[j]=k且T[j]=T[k]时,S[i]与T[j]失配后,S[i]与T[k]也必然失配,无需重复比较。
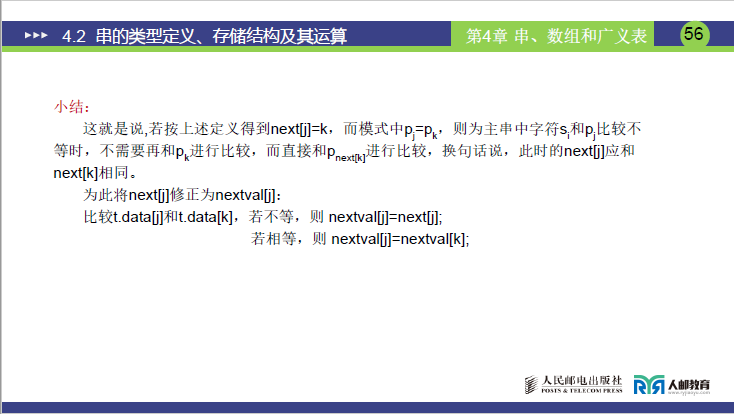
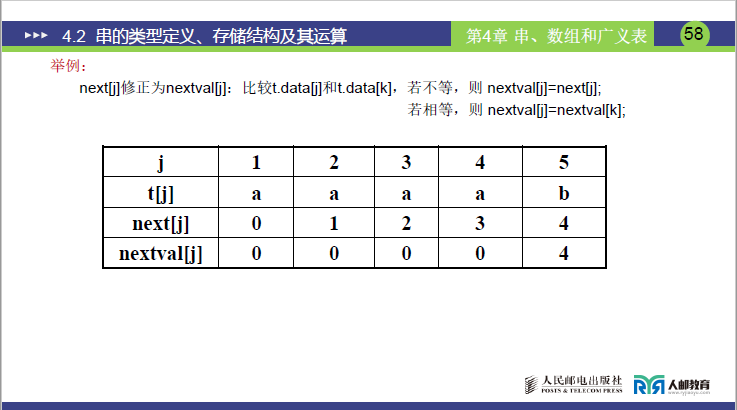
nextval[j]优化规则(课件页码 56,图:优化逻辑图)
(1)核心思想
- 若T[j]==T[next[j]]:nextval[j]=nextval[next[j]](跳过无效比较,继承
nextval[next[j]]); - 若T[j]≠T[next[j]]:nextval[j]=next[j](直接沿用
next[j])。
(2)nextval[j]计算实例 1:模式串T="aaaab"(课件页码 57-58)
- 已知
next[j] = [0,1,2,3,4],逐j推导:
| j | T[j] | next[j] = k |
T[j]与T[k]比较 | nextval[j] |
老师讲课补充 |
|---|---|---|---|---|---|
| 1 | a | 0 | 无(k=0无字符) | 0 | 规定值 |
| 2 | a | 1 | T[2]=a==T[1]=a | nextval[1]=0 |
相等,继承 nextval [1] |
| 3 | a | 2 | T[3]=a==T[2]=a | nextval[2]=0 |
相等,继承 nextval [2] |
| 4 | a | 3 | T[4]=a==T[3]=a | nextval[3]=0 |
相等,继承 nextval [3] |
| 5 | b | 4 | T[5]=b≠T[4]=a | next[5]=4 |
不等,沿用 next [4] |
- 结果(与课件 58 页一致):
nextval[j] = [0,0,0,0,4] - 优化效果:i=4,j=4失配时,j=nextval[4]=0 → i=5,j=1,直接跳过 3 次无效比较。
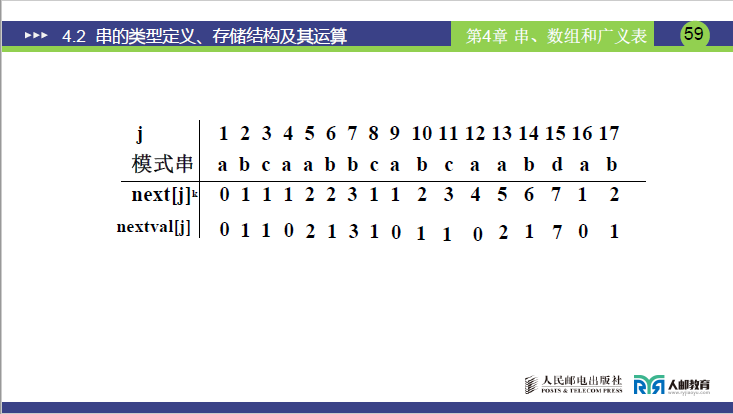
(3)nextval[j]计算实例 2:长模式串
- 模式串:T="abcaabbcabcaabdab"(j=1−17);
- 已知
next[j] = [0,1,1,1,2,2,3,1,1,2,3,4,5,6,7,1,2]; - 关键优化点(重点拆解):
- j=4(T[j]=a):
next[j]=1(T[1]=a),T[4]=a==T[1]=a →nextval[4]=nextval[1]=0; - j=12(T[j]=a):
next[j]=4(T[4]=a),T[12]=a==T[4]=a →nextval[12]=nextval[4]=0; - j=17(T[j]=b):
next[j]=2(T[2]=b),T[17]=b==T[2]=b →nextval[17]=nextval[2]=1;
- j=4(T[j]=a):
- 最终
nextval[j] = [0,1,1,0,2,1,3,1,1,2,3,0,5,6,7,1,1]。
⑥KMP 算法时间复杂度
- 时间复杂度分析
- 求
next/nextval数组:遍历模式串 1 次,时间复杂度O(m)(m为模式串长度); - 匹配过程:主串指针i不回溯,仅遍历主串 1 次,比较次数为O(n)(n为主串长度);
- 总时间复杂度:O(n+m)。
- 与 BF 算法对比
- BF 算法:最坏时间复杂度O(n×m)(如主串s="aaaaa...",模式串t="aaab");
- KMP 算法:无论最好 / 最坏情况,总时间复杂度均为O(n+m),在长串匹配(如文本检索、DNA 序列匹配)中效率显著更高。
(4)核心重难点总结
- KMP 核心:主串指针不回溯,利用模式串自身前后缀特性确定滑动距离,关键是
next[j]函数的计算; next[j]本质:模式串前j−1位的最大相同首尾真子串长度 + 1(j=1时为 0);nextval作用:解决next[j]的无效比对缺陷,进一步压缩比对次数;- 考点方向:
next[j]/nextval[j]的手工计算、KMP 匹配流程、时间复杂度分析。
4.3 数组
4.3.1 数组的概念
(1)数组的定义
数组是由个数固定、类型相同的数据元素组成的阵列,是编程中常用的数据结构。
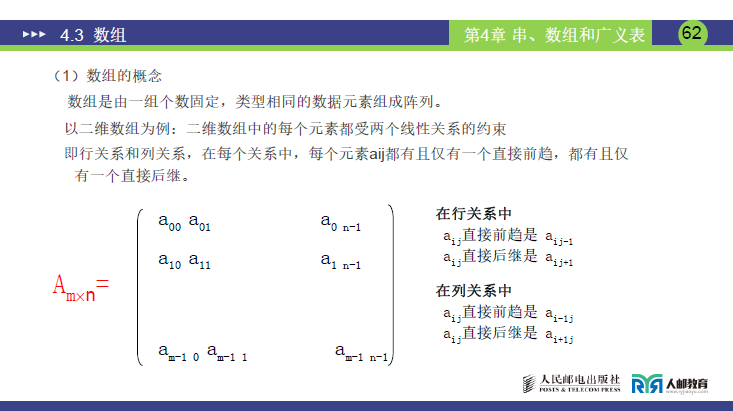
(2) 二维数组的线性特性分析
一维数组是典型的线性结构(每个元素仅有一个直接前驱和一个直接后继),但二维数组不满足线性结构的定义:
对于二维数组 Am×n(共 m 行、n 列,元素表示为 aij,0≤i≤m−1,0≤j≤n−1),每个元素 aij 存在两个维度的前驱和后继:
- 行维度:直接前驱为 ai,j−1(同一行前一列元素),直接后继为 ai,j+1(同一行后一列元素);
- 列维度:直接前驱为 ai−1,j(同一列前一行元素),直接后继为 ai+1,j(同一列后一行元素)。
(3) 二维数组的数学表示
二维数组的数学形式为:\(\color{black}{A_{m \times n}=} \begin{pmatrix} a_{00} & a_{01} & & a_{0 \ n-1} \\ a_{10} & a_{11} & & a_{1 \ n-1} \\ \\ a_{m-1 \ 0} & a_{m-1 \ 1} & & a_{m-1 \ n-1} \end{pmatrix}\)
其中 m 是行数,n 是列数,所有元素的类型一致。
4.3.2 数组的顺序存储结构
数组的存储本质是 “线性化”—— 将多维结构映射到一维内存空间,核心区别在于维度遍历顺序,分为 “以行为主序” 和 “以列为主序” 两种策略。
(1)一维数组的存储
一维数组本身是线性结构,直接将元素按下标顺序存入连续内存单元即可,例如数组 B[0..k−1],存储顺序为 B[0]→B[1]→⋯→B[k−1],无需额外处理。
(2)二维数组的两种存储策略
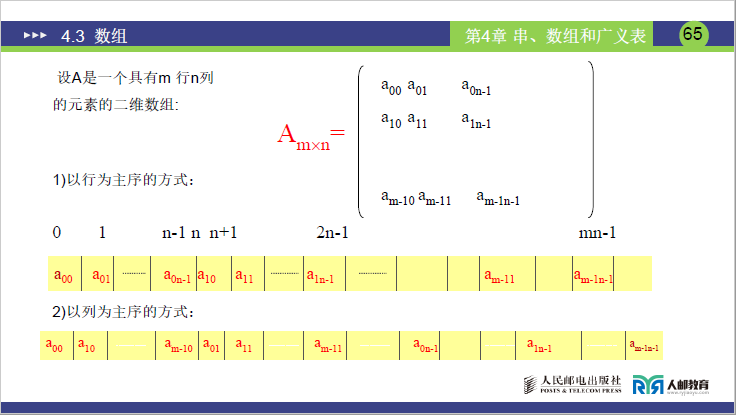
①以行为主序(行优先,C/C++/C# 采用)
- 核心规则:先存完一行所有元素,再存下一行(“先行后列”);
- 存储顺序:a00→a01→⋯→a0,n−1→a10→a11→⋯→a1,n−1→⋯→am−1,0→am−1,1→⋯→am−1,n−1;
- 示意:一维存储空间中,元素排列为 a00 a01 ... a0,(n-1) a10 a11 ... a1,(n-1) ... a(m-1),(n-1),下标从 0 到 m×n−1。
②以列为主序(列优先,部分其他语言采用)
- 核心规则:先存完一列所有元素,再存下一列(“先列后行”);
- 存储顺序:a00→a10→⋯→am−1,0→a01→a11→⋯→am−1,1→⋯→a0,n−1→a1,n−1→⋯→am−1,n−1;
- 示意:一维存储空间中,元素排列为 a00 a10 ... a(m-1),0 a01 a11 ... a(m-1),1 ... a(m-1),(n-1),下标从 0 到 m×n−1。
③数组元素存储地址的计算
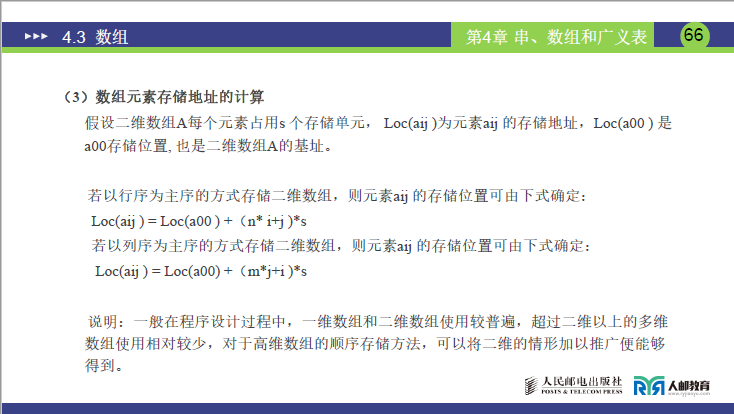
数组元素的存储地址是 “基地址 + 偏移量”,需结合存储策略(行 / 列优先)计算,核心参数如下:
- Loc(a00):二维数组的基地址(即第一个元素 a00 的存储地址);
- s:每个元素占用的存储单元数(如 int 型占 4 字节,s=4);
- m:数组行数,n:数组列数;
- aij:目标元素(行下标 i,列下标 j)。
A. 行优先存储(C 语言体系)
- 偏移量计算:前 i 行(0 到 i−1 行)共 i×n 个元素,第 i 行中 a**ij 是第 j 个元素,总偏移元素个数为 n×i+j;
- 地址公式:Loc(aij)=Loc(a00)+(n×i+j)×s
B. 列优先存储
- 偏移量计算:前 j 列(0 到 j−1 列)共 j×m 个元素,第 j 列中 a**ij 是第 i 个元素,总偏移元素个数为 m×j+i;
- 地址公式:Loc(aij)=Loc(a00)+(m×j+i)×s
C. 示例计算
已知二维数组 A5×4(m=5,n=4),基地址 Loc(a00)=1000,每个元素占 4 字节(s=4),求 Loc(a2,3)(行优先):
- 偏移元素个数:4×2+3=11;
- 偏移字节数:11×4=44;
- 存储地址:1000+44=1044。
D.矩阵的压缩存储
矩阵是特殊的二维数组,压缩存储的核心是 “只存必要元素”(避免零元素或重复元素占用空间),分为特殊矩阵和稀疏矩阵两类。
1.特殊矩阵
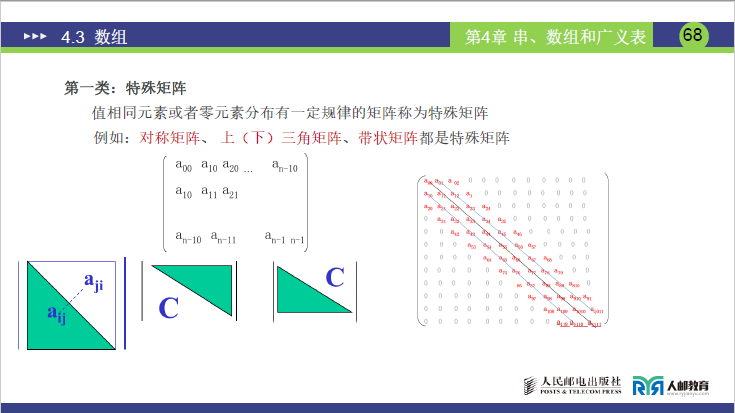
特殊矩阵是 “值相同元素或零元素分布有规律” 的矩阵,包括对称矩阵、上 / 下三角矩阵、带状矩阵(对角矩阵)。
-
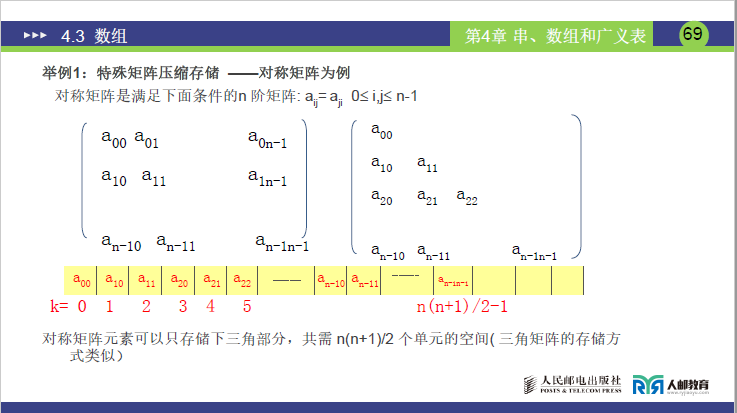
对称矩阵
-
定义:满足 aij=aji(0≤i,j≤n−1)的 n 阶矩阵,元素关于主对角线对称;
-
压缩思路:只需存储下三角(或上三角)+ 主对角线元素(共 n(n+1)/2 个元素),对称元素通过 “行列互换” 获取;
-
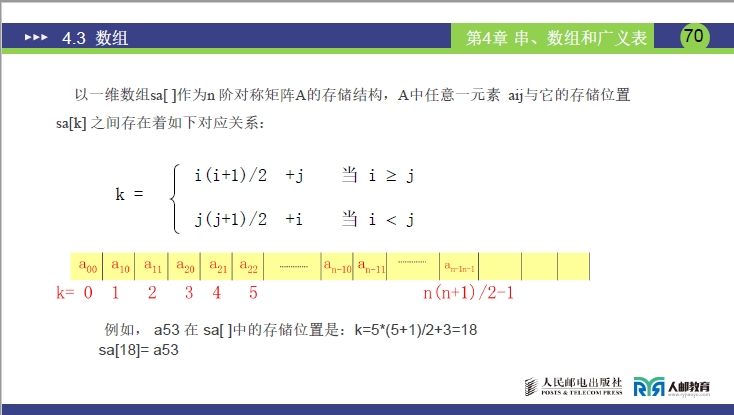
课件 69 页存储示意图:一维数组 sa[] 存储下三角元素,顺序为 a00→a10→a11→a20→a21→a22→⋯→an−1,n−1,下标 k 从 0 到 n(n+1)/2−1。
-
元素与存储地址的映射关系:
- 若 i≥j(下三角元素,直接存储):k=i(i+1)/2+j;
- 若 i<j(上三角元素,对称获取):k=j(j+1)/2+i(因 aij=aji,映射到 aji 的存储位置)。
-
示例(课件 70 页例子):求 a5,3 在 sa[] 中的存储位置(i=5,j=3,i≥j):
k=25×(5+1)+3=15+3=18
即 sa[18]=a5,3;若求 a3,5,因 a3,5=a5,3,故 k=18,sa[18]=a3,5。
-
-
上 / 下三角矩阵
-
定义:
- 下三角矩阵:主对角线以上元素全为常数(如 0),主对角线及以下元素非零;
- 上三角矩阵:主对角线以下元素全为常数(如 0),主对角线及以上元素非零;
-
压缩思路:
- 下三角矩阵:存储下三角 + 主对角线元素(共 n(n+1)/2 个),常数单独存 1 个;
- 上三角矩阵:存储上三角 + 主对角线元素(共 n(n+1)/2 个),常数单独存 1 个;
-
映射关系:与对称矩阵类似,仅需关注非零区域的元素下标计算。
-
-
带状矩阵(对角矩阵)
-
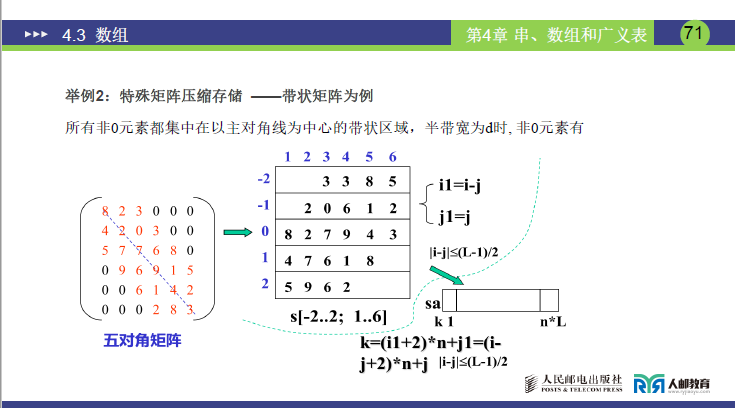
定义:非零元素集中在 “以主对角线为中心的带状区域”,如三对角(主对角线 ±1 条)、五对角(主对角线 ±2 条)矩阵;
-
压缩思路:只存储带状区域内的非零元素,避免零元素占用空间,常用两种方式:
① 补零法:
- 核心:补零使每行元素个数等于 “带宽 L”(如五对角 L=5),按行存储到一维数组;
- 空间大小:n×L(n 为矩阵阶数);
- 映射公式:若 ∣i−j∣≤2L−1(非零元素),则 k=(i−1)×L+1+(j−i);
- 课件 71 页五对角矩阵示例:左图五对角矩阵(6 阶),补零后每行存 5 个元素,一维数组 sa[] 存储顺序为
8 2 3 4 2 0 3 5 7 7 6 8 9 6 9 1 5 6 1 4 2 2 8 3 2 1 2 2 2 3。
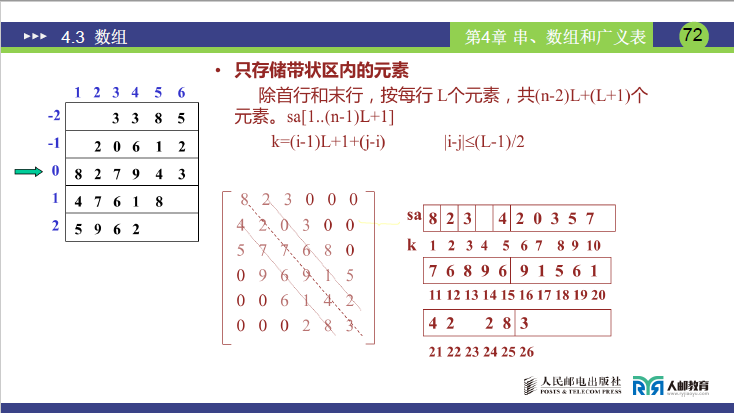
② 直接存储非零区域(课件 72 页说明):
- 核心:首行和末行按实际非零元素个数存储,中间行按带宽 L 存储;
- 空间大小:(n−2)×L+(L+1)(首末行各多 1 个元素);
- 适用场景:零元素极少,需严格节省空间时。
-
-
稀疏矩阵(课件页码 73-79 页)
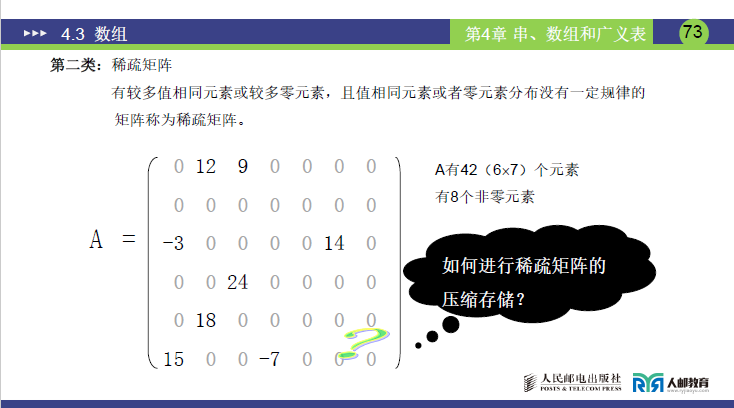
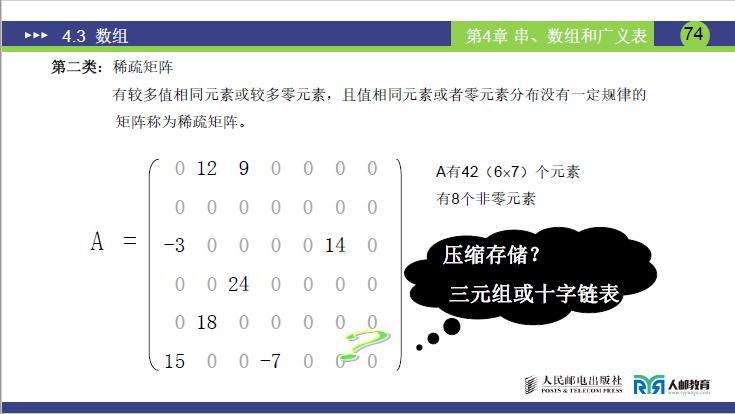
- 定义:零元素数量远多于非零元素,且非零元素分布无规律的矩阵(如课件 73 页矩阵 A:6 行 7 列共 42 个元素,仅 8 个非零元素);
- 压缩思路:只存储非零元素的 “位置 + 值”,避免零元素浪费空间,常用两种结构:
(1)三元组表(顺序存储,课件页码 74-77 页)

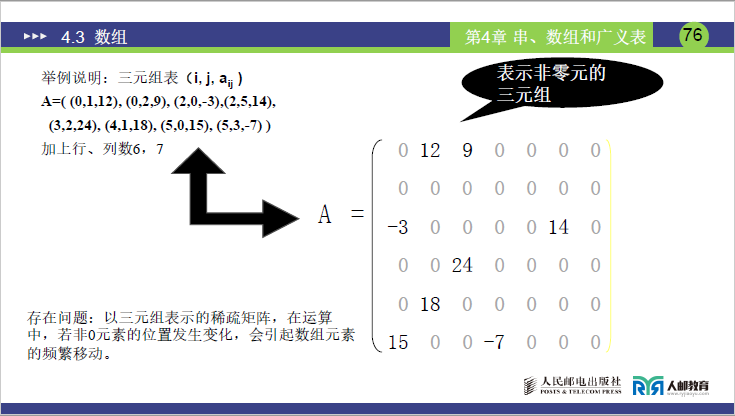
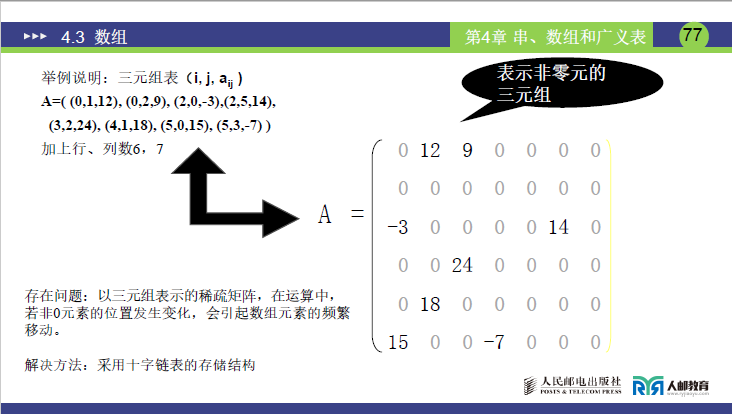
- 核心结构:每个非零元素用 “三元组 (i,j,value)” 表示(i 行下标、j 列下标、value 元素值),同时记录矩阵总行数 m、总列数 n、非零元素个数 t;
- 课件 75 页示意图:矩阵 A 的三元组表课件75页图
- 关键说明:
- 必须记录 m 和 n:否则无法确定矩阵大小,无法恢复零元素的位置(如仅给三元组,不知道是 6×7 还是其他尺寸的矩阵);
- 存储顺序:通常按行优先排列,便于后续遍历和恢复矩阵。
- 矩阵恢复示例:根据上述三元组表恢复 6×7 矩阵 A:
- 初始化 6 行 7 列全零矩阵;
- 依次将三元组中的 (i,j,value) 填入对应位置,得到课件 73 页的矩阵 A。
(2)十字链表(链式存储,课件页码 78-79 页)
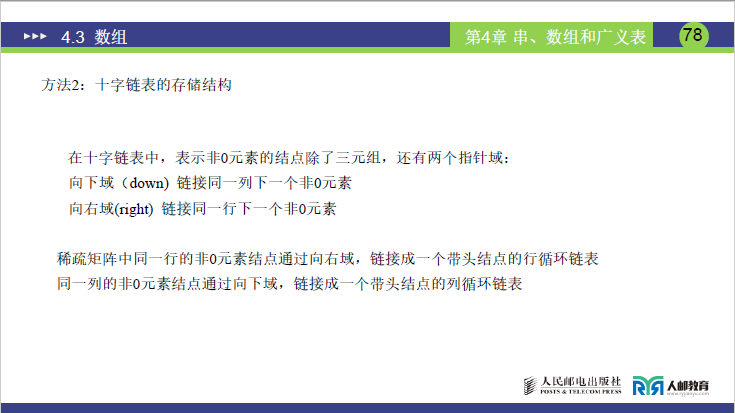
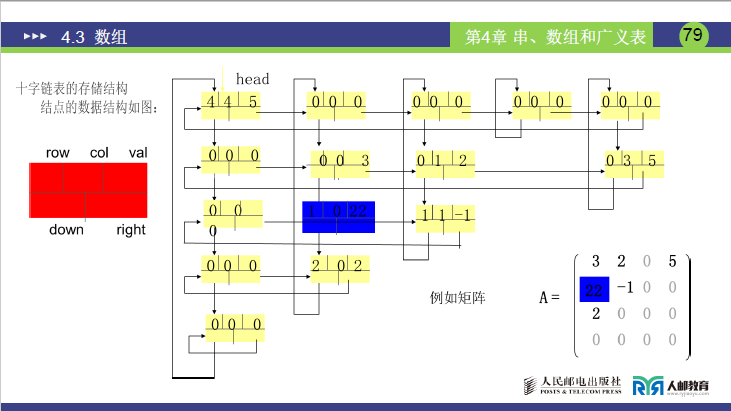
- 核心结构:非零元素用 “十字链表结点” 存储,结点包含 5 个域(课件 78 页结点图):
- i:非零元素的行下标;
- j:非零元素的列下标;
- value:非零元素的值;
- right:指针,指向同一行的下一个非零元素;
- down:指针,指向同一列的下一个非零元素;
- 整体结构(课件 79 页示意图):
- 每行非零元素通过 right 指针链接成 “带头结点的行循环链表”;
- 每列非零元素通过 down 指针链接成 “带头结点的列循环链表”;
- 所有行链表的头结点和列链表的头结点集中存储,便于定位。
- 示例(讲课补充):矩阵 A 中 (0,1,12) 结点:
- right 指针指向同一行的下一个非零元素 (0,2,9);
- down 指针指向同一列的下一个非零元素 (4,1,18);
- (0,2,9) 的 down 指针指向同一列的 (3,2,24),以此形成十字链接。
- 优势:相比三元组表,十字链表支持高效的插入、删除操作(无需移动大量元素),适合动态修改的稀疏矩阵。
4.4广义表
4.4.1 广义表的定义与说明
(1)广义表的定义
课件内容:广义表也称为列表,是线性表的一种扩展,也是数据元素的有限序列。记作 LS = (d₀, d₁, d₂, ..., dₙ₋₁),其中每个数据元素 d**i 既可以是单个元素(称为 “原子”),也可以是广义表(称为 “子表”)。
广义表的核心价值在于 “统一表示”—— 它打破了线性表只能存储单个元素的限制,允许元素是原子(如数字、字符)或子表(子表可进一步包含原子或更复杂的结构,甚至图、树等),从而将线性结构与非线性结构统一在同一种表示范式中,这种统一性在计算机数据结构研究和实际应用中非常重要。
同时,广义表的定义是递归定义(描述广义表时,数据元素又可能是广义表),这也是它与普通线性表的关键区别之一。
(2)核心说明
- 递归性:广义表的定义具有递归性,因描述广义表时会再次用到 “广义表” 这一概念(如子表本身就是广义表)。
- 元素多样性:线性表的所有数据元素均为 “单个原子”,而广义表的元素分为两类:
- 原子:不可再分的单个元素(如
a、5、'x'); - 子表:可再分的广义表(如
(b,c,d)、(A,B),其中A、B也可是广义表)。
- 原子:不可再分的单个元素(如
- 表长定义:广义表的 “长度” 指其一级元素的个数(即最外层括号内,由逗号分隔的元素总数),用
n表示(对应定义中 d0 到 d**n−1 的个数)。
4.4.2 广义表示例解析(课件 82 页)
课件给出 5 个典型广义表示例,结合讲课内容详细说明如下:
| 广义表 | 课件定义 | 讲课补充解析(表长、元素类型) |
|---|---|---|
| A=() | 空表 | - 表长为 0(最外层括号内无任何元素);- 是空广义表的标准表示,无原子也无子表。 |
| B=(a,(b,c,d)) | 含 1 个原子和 1 个子表的广义表 | - 表长为 2(一级元素共 2 个:逗号前是原子 a,逗号后是子表 (b,c,d));- 注意:子表 (b,c,d) 是 “二级结构”,计算表长时仅算一级元素,不深入子表内部。 |
| C=(e) | 含 1 个原子的广义表 | - 表长为 1(最外层括号内仅 1 个一级元素:原子 e);- 与原子 e 的区别:C 是广义表(带括号),e 是单个原子,二者数据类型不同。 |
| D=(A,B,C,f) | 含 3 个子表和 1 个原子的广义表 | - 表长为 4(一级元素共 4 个:子表 A、子表 B、子表 C、原子 f);- 前 3 个元素是已定义的广义表(子表),第 4 个是原子,体现广义表元素的多样性。 |
| E=(a,E) | 递归广义表 | - 表长为 2(一级元素:原子 a、子表 E);- 递归性体现:子表 E 就是广义表本身,这种结构可用于描述无限序列(如 (a, (a, (a, ...)))),但实际存储时会通过指针闭环实现有限表示。 |
4.4.3 广义表的核心运算 —— 表头与表尾(课件 83 页)
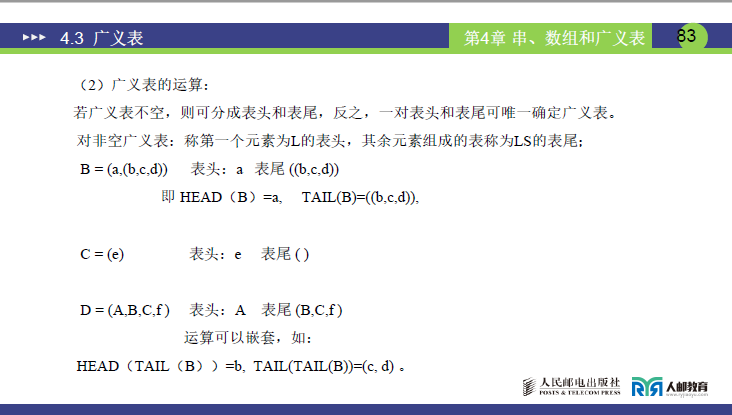
广义表的核心运算围绕 “表头” 和 “表尾” 展开,是构建和分解广义表的基础,课件明确以下规则:
(1)运算定义
- 表头(HEAD (LS)):对非空广义表
LS,其第一个一级元素称为表头(表头可以是原子,也可以是子表)。 - 表尾(TAIL (LS)):对非空广义表
LS,除去表头后,剩余一级元素组成的新广义表称为表尾(表尾一定是广义表,即使剩余 1 个元素,也需用括号包裹成表)。 - 关键结论:一对表头和表尾可唯一确定一个广义表(已知表头和表尾,即可反向构造出原广义表)。
(2)运算示例
结合讲课解释,对课件示例的运算步骤拆解如下:
| 原广义表 | 表头(HEAD (LS)) | 表尾(TAIL (LS)) | 讲课补充解析 |
|---|---|---|---|
| B=(a,(b,c,d)) | a(原子) | ((b,c,d))(广义表) | - 表头是第一个一级元素 a;- 表尾是 “除去 a 后剩余的一级元素(子表 (b,c,d))”,需用括号包裹成新表,故为 ((b,c,d))(而非 (b,c,d))。 |
| C=(e) | e(原子) | ()(空表) | - 表头是唯一的一级元素 e;- 除去 e 后无剩余元素,表尾为空表 ()。 |
| D=(A,B,C,f) | A(子表) | (B,C,f)(广义表) | - 表头是第一个一级元素(子表 A);- 表尾是剩余 3 个一级元素组成的新表 (B, C, f)。 |
(3)嵌套运算
课件示例:HEAD(TAIL(B)) = b、TAIL(TAIL(B)) = (c,d)
步骤拆解:
-
先求
TAIL(B):由上文知TAIL(B) = ((b,c,d))(表尾是广义表); -
再求
HEAD(TAIL(B)):对((b,c,d))取表头,其第一个一级元素是子表(b,c,d),故HEAD(TAIL(B)) = (b,c,d)?(注:课件结论为b,实际需进一步嵌套:对(b,c,d)再取表头,即HEAD((b,c,d)) = b,完整表达式应为HEAD(HEAD(TAIL(B))) = b,可能是课件简写,核心是 “嵌套运算需从内到外逐步拆解”); -
求
TAIL(TAIL(B)):对((b,c,d))取表尾,除去表头(b,c,d)后无剩余元素?实际应为TAIL((b,c,d)) = (c,d),需结合子表内部运算,本质是 “嵌套运算需逐层处理每个广义表的表头和表尾”。
4.4.4 广义表的存储结构(课件 84-85 页)
由于广义表元素既可以是原子也可以是子表(结构不统一),无法用顺序存储(顺序存储要求元素结构一致),因此采用链表存储,课件定义两种核心节点类型:
(1)节点结构定义
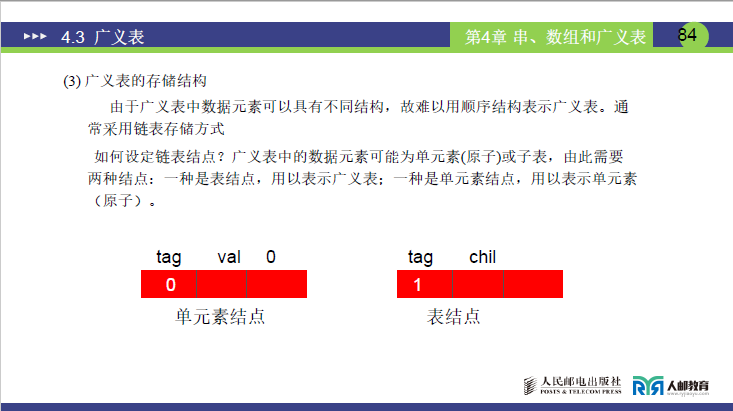
广义表的链表由 “单元素节点” 和 “表节点” 组成,通过 tag 标志区分节点类型:
| 节点类型 | tag 标志 |
核心域 | 作用 |
|---|---|---|---|
| 单元素节点(原子节点) | 0 | val 域 |
存储 “原子” 的值(如字符 a、数字 5),代表广义表中的单个元素。 |
| 表节点(子表节点) | 1 | child 域 |
存储指向 “子表” 的指针(child 指向子表的链表头节点),代表广义表中的子表。 |
讲课补充:
tag是 “类型标志位”,0 表示 “此节点是不可再分的原子”,1 表示 “此节点是可再分的子表”;- 所有节点还需包含
next域(课件未显式画出,但链表需通过next连接同一广义表的多个一级元素),next指向同一广义表的下一个一级元素节点(若为最后一个元素,next为NULL)。
(2)存储结构示例图
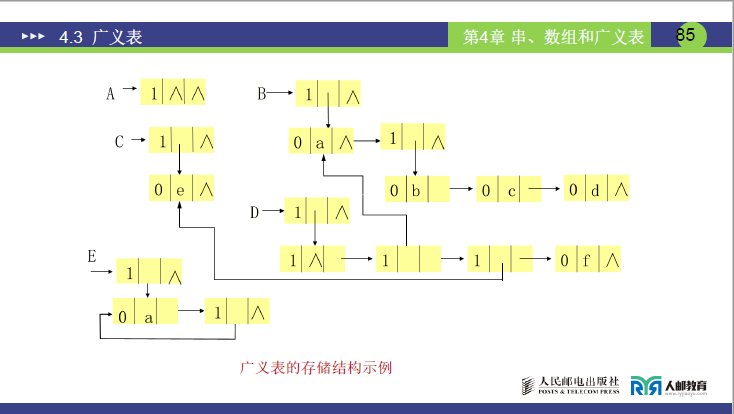
以广义表 B=(a,(b,c,d)) 为例,课件 85 页图展示其存储结构,结合讲课解释拆解如下:
- 根节点:表节点(
tag=1),代表整个广义表 B;其child域指向广义表的第一个一级元素节点,next域为NULL(根节点无后续节点)。 - 第一个一级元素节点:单元素节点(
tag=0),val=a;其next域指向第二个一级元素节点(子表节点)。 - 第二个一级元素节点:表节点(
tag=1),代表子表(b,c,d);其child域指向子表的第一个元素节点,next域为NULL(无后续一级元素)。 - 子表
(b,c,d)的元素节点:3 个单元素节点(tag=0),分别存储val=b、val=c、val=d;通过next域依次连接(b的next指向c,c的next指向d,d的next为NULL)。
简言之,该图通过 “表节点嵌套表节点 / 单元素节点” 的方式,完整表示了广义表 B 中 “原子与子表共存” 的结构,体现了链表存储的灵活性。
总结
广义表是线性表的扩展,核心特点是 “元素可原子可子表” 和 “定义递归”,通过表头 / 表尾运算实现分解与构造,通过 “双节点类型的链表” 实现存储,最终达成 “统一线性与非线性结构” 的目标,是数据结构中兼具灵活性和统一性的重要结构。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号