
【MATLAB例程】多雷达(数量自适应)跟踪三维目标,目标匀速运动,带扩展卡尔曼滤波|观测量为(斜距、俯仰角、方位角)。附代码下载链接 - 教程
多雷达观测的三维目标跟踪框架,在存在测量噪声与过程噪声的情况下,对目标的空间位置、速度以及角速度进行融合估计。程序适用于多雷达协同目标跟踪算法的研究,建模过程考虑了目标运动的扰动、观测的距离噪声和角度噪声。
程序详解
程序实现基于扩展卡尔曼滤波(Extended Kalman Filter, EKF)的多雷达三维目标跟踪系统,能够在存在测量噪声与过程噪声的情况下,对目标的空间位置、速度以及角速度进行融合估计。程序结构完整,适用于多雷达协同目标跟踪算法的研究、教学及性能对比实验。
算法原理概述
系统采用混合运动模型(直线+协调转弯),通过离散时间状态方程对目标进行动态预测;多部雷达则分别给出斜距、俯仰角与方位角三类非线性观测信息。
在滤波更新阶段,程序对各雷达观测采用序贯更新策略(Sequential Update),逐个融合雷达信息,从而提升整体估计精度并避免矩阵维度膨胀。
核心估计流程包括:
- 预测步骤:根据上一时刻状态及运动模型,预测目标的状态与协方差。
- 观测更新:依次融合各雷达观测信息,计算卡尔曼增益并修正状态估计。
- 结果输出与可视化:生成3D轨迹、XY投影图、误差时序曲线及RMSE统计柱状图等。
主要参数可配置项
config.T:采样周期(默认0.1 s)config.total_time:仿真时长(默认60 s)config.num_radars:雷达数量(默认4,可自定义)config.sigma_range、config.sigma_elevation、config.sigma_azimuth:各类测量噪声标准差config.sigma_acc、config.sigma_omega:过程噪声标准差(控制滤波器响应能力)radar_positions:各雷达坐标 [x, y, z](米)
结果输出说明
运行后应用将输出以下内容:
- 三维轨迹图
- 误差时间历程
- 位置分量误差图
- 协方差迹变化图
- 性能统计柱状图
- 命令行输出统计报告
应用与扩展
- 多传感器信息融合与协同定位;
- 三维目标跟踪与航迹重建;
- 扩展卡尔曼滤波(EKF)与自适应滤波算法性能对比;
- 多雷达协同感知体系仿真验证。
运行结果
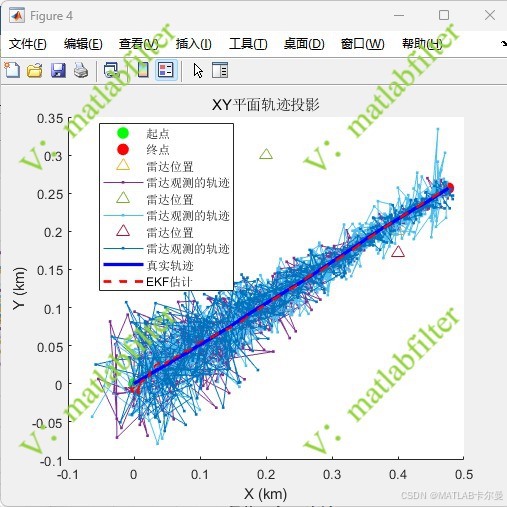
轨迹对比: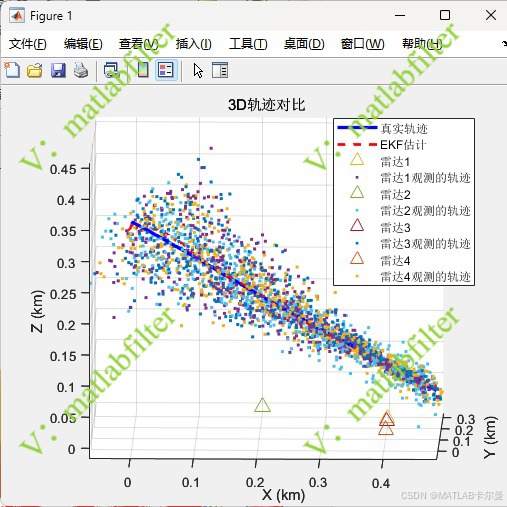
误差曲线对比: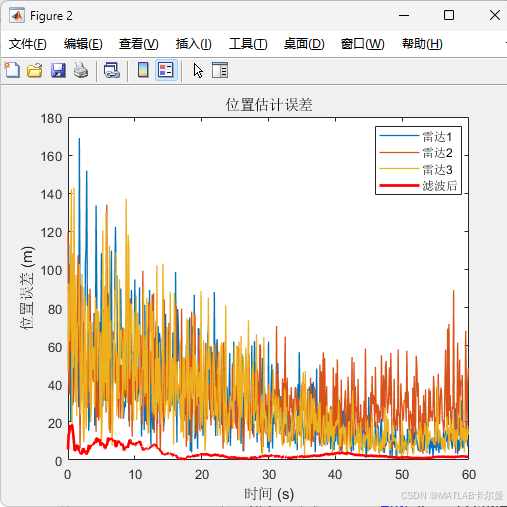
跟踪性能统计结果(命令行截图):
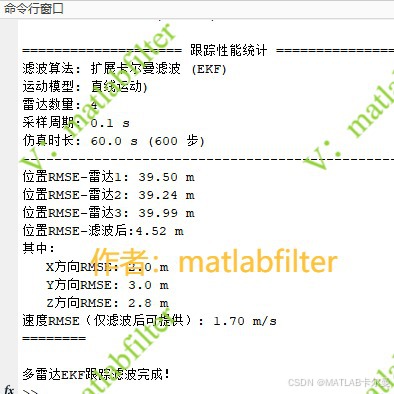
缘于是可调雷达数量的,下面是2个雷达时的结果: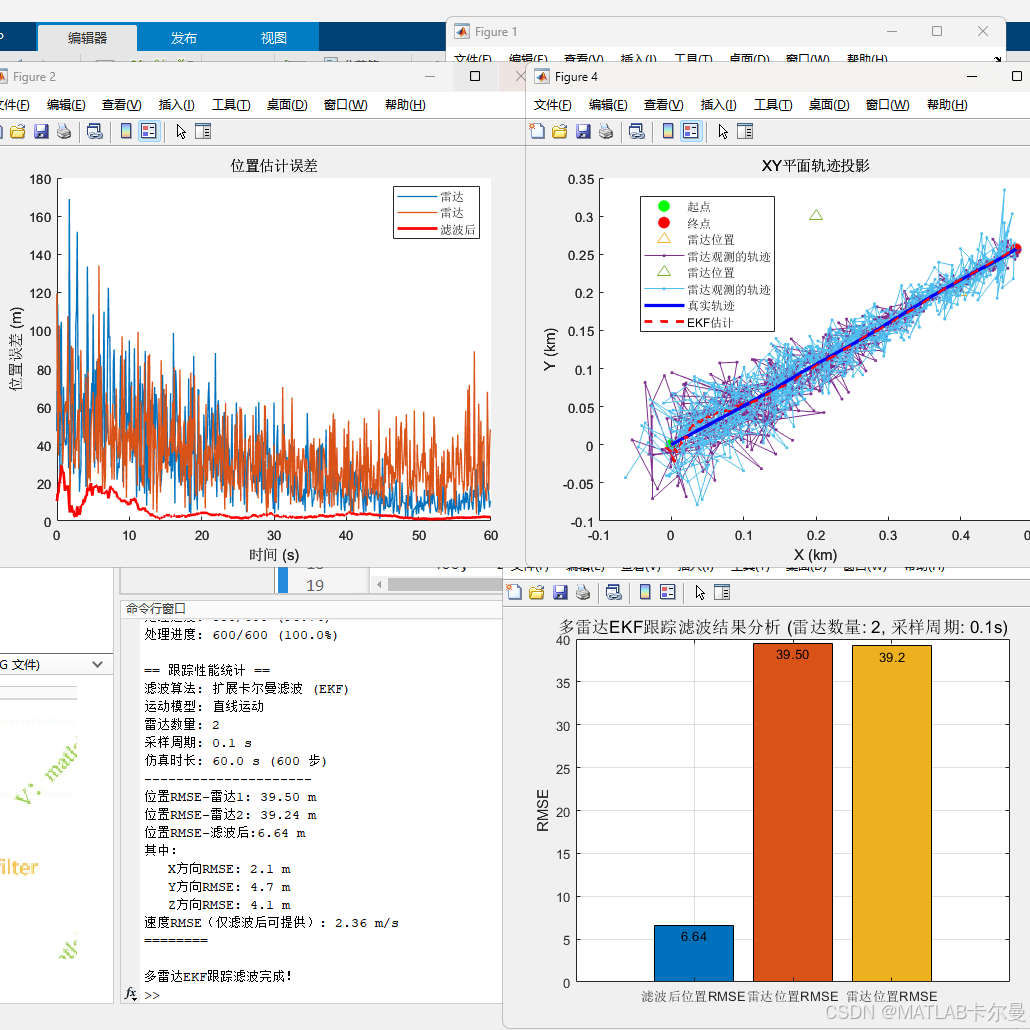
MATLAB源代码
完整代码如下:
% 多雷达三维目标跟踪滤波系统 - EKF实现
% 匀速直线运动,雷达数量自定义
% 输入:雷达观测数据(斜距、俯仰角、方位角)
% 输出:目标状态估计(位置、速度、转弯角速度)
% 2025-10-29/Ver1
% 作者: matlabfilter
clc; clear; close all;
rng(0);
%% == 系统参数配置 ===
% 【可修改】基本参数
config.T = 0.1; % 采样周期 (s) - 可修改
config.total_time = 60; % 总仿真时间 (s) - 可修改
config.num_steps = config.total_time / config.T;
config.num_radars = 4;
% 【可修改】雷达位置配置 [x, y, z] (m) - 固定位置,需要时可修改
radar_positions = [
400, 200, 0; % 雷达1位置
200, 300, 0; % 雷达2位置
400, 172, 0; % 雷达3位置
400, 100, 0];
% 根据雷达数量截取相应位置
radar_positions = radar_positions(1:config.num_radars, :);
% 【可修改】测量噪声标准差 - 根据实际雷达精度调整
config.sigma_range = 5; % 斜距测量噪声标准差 (m)
config.sigma_elevation = 0.1; % 俯仰角测量噪声标准差 (rad)
config.sigma_azimuth = 0.1; % 方位角测量噪声标准差 (rad)
% 【可修改】过程噪声标准差 - 影响滤波器的跟踪能力
config.sigma_acc = 0.001; % 线性加速度过程噪声标准差 (m/s²)
config.sigma_omega = 0.001; % 角速度过程噪声标准差 (rad/s)完整代码:
https://download.csdn.net/download/callmeup/92224085
或前往付费专栏查看:
https://blog.csdn.net/callmeup/article/details/154070282?spm=1011.2415.3001.5331
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者

 浙公网安备 33010602011771号
浙公网安备 33010602011771号