
三十二、STM32的USART(串口收发文本数据包) - 实践
前言:串口(USART)是嵌入式工程中使用频率最高的通信接口。不论是调试输出、模块控制、板间通信,都离不开串口。本篇文章带你从零实现一个 串口文本数据包协议收发案例:
数据包格式:
@MSG\r\n通过中断 + 状态机解析完整数据包
将收到的文本指令显示到 OLED
收到如
"LED_ON"指令自动执行动作,并回传执行结果
目录
一、接线图

二、功能说明
本项目实现如下功能:
1. 上位机发送文本指令
格式:
@LED_ON\r\n
@LED_OFF\r\n
2. STM32 接收完整数据包并解析
解析内容存入:
char Serial_RxPacket[100];
3. OLED 显示收到的文本命令
LED_ON
LED_OFF
4. 执行对应操作

5. 串口回传执行结果
LED_ON_OK
LED_OFF_OK
ERROR_COMMAND
三、串口文本数据包格式设计
我们采用一个简单、稳定、安全的文本协议格式:
@内容\r\n
例如:
@LED_ON\r\n

为什么选 @?
特殊字符,不易混淆
便于状态机识别
文本协议常用格式
四、串口初始化(9600 8N1)
以下代码完成 GPIO、USART、NVIC 中断初始化:
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}五、串口接收数据包 —— 状态机解析核心
状态机三阶段:
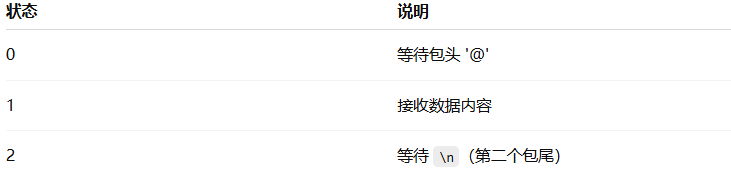
完整中断解析代码:
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0)
{
if (RxData == '@' && Serial_RxFlag == 0)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
if (RxData == '\r')
{
RxState = 2;
}
else
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket++;
}
}
else if (RxState == 2)
{
if (RxData == '\n')
{
RxState = 0;
Serial_RxPacket[pRxPacket] = '\0';
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}为什么需要状态机?
串口数据是一个字节一个字节来的
不能保证一次收到全部数据
协议解析必须严格依靠状态机实现
六、OLED 显示收发内容
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
显示接收到的内容:
OLED_ShowString(4, 1, " ");
OLED_ShowString(4, 1, Serial_RxPacket);
七、根据指令执行动作(LED 控制)
if (strcmp(Serial_RxPacket, "LED_ON") == 0)
{
LED1_ON();
Serial_SendString("LED_ON_OK\r\n");
}
else if (strcmp(Serial_RxPacket, "LED_OFF") == 0)
{
LED1_OFF();
Serial_SendString("LED_OFF_OK\r\n");
}
else
{
Serial_SendString("ERROR_COMMAND\r\n");
}并在 OLED 显示执行结果:
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_ON_OK");
八、完整 main.c
#include "stm32f10x.h"
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include "string.h"
int main(void)
{
OLED_Init();
LED_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
while (1)
{
if (Serial_RxFlag == 1)
{
OLED_ShowString(4, 1, " ");
OLED_ShowString(4, 1, Serial_RxPacket);
if (strcmp(Serial_RxPacket, "LED_ON") == 0)
{
LED1_ON();
Serial_SendString("LED_ON_OK\r\n");
OLED_ShowString(2, 1, "LED_ON_OK");
}
else if (strcmp(Serial_RxPacket, "LED_OFF") == 0)
{
LED1_OFF();
Serial_SendString("LED_OFF_OK\r\n");
OLED_ShowString(2, 1, "LED_OFF_OK");
}
else
{
Serial_SendString("ERROR_COMMAND\r\n");
OLED_ShowString(2, 1, "ERROR_COMMAND");
}
Serial_RxFlag = 0;
}
}
}九、上位机调试方法
打开串口助手,设置:
9600 波特率
文本模式(发送字符串)
必须发送结束符
\r\n
@LED_ON\r\n
@LED_OFF\r\n
即可看到:
LED 点亮 / 熄灭
OLED 显示命令
STM32 回传
LED_ON_OK
十、总结
本项目完整展示了:
GPIO + USART + NVIC 初始化
串口文本协议设计
状态机解析数据包
OLED 显示系统
文本指令控制 LED
串口回传执行结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号