
Kratos微服务框架物联网IoT实战:设备实时地图 - 详解
Kratos微服务框架物联网IoT实战:设备实时地图
IoT,也就是物联网,万物互联,在未来肯定是一个热点——实际上,现在物联网已经很热了。
那好,既然这一块这么有前途。那我们就来学习怎么开发物联网系统吧。可是,作为一个小白,两眼一抹黑:我想学,可是我该如何开始?这玩意儿到底该咋整呢?
于是,我各种找资料,各种学习——此处省略一亿个字,其中的艰辛,其中的曲折,总之就是:说来都是泪,欲哭却无声——总算是有了基础的认知,有了一个模糊的方向。我知道了物联网设备通讯协议MQTT、CoAP、LwM2M,知道了微服务,知道了MQ,知道了Websocket,知道了REST,知道了gRPC……有了这些认知,看起来可以开始做技术选型了。
在这个时候,我发现了B站开源的微服务框架go-kratos。那么,Kratos能否实现物联网的系统和功能呢?答案是:必须可以。
我们现在要开发一个物联网的系统,Kratos能够为我们提供什么技术支撑呢?有以下功能模块可供使用:
- MQTT,用于设备与物联网服务之间的同异步通讯;
- gRPC,用于微服务之间的同步通讯;
- MQ消息队列(RabbitMQ、Kafka、Pulsar、NATS、RocketMQ等),用于微服务之间的异步通讯;
- REST(基于gRPC gateway),用于后端跟前端的同步通讯;
- Websocket,用于后端跟前端的异步通讯。
物联网一个最基础的功能就是实时地图了,也就是在地图上展现设备的动态,比如:位置、轨迹、方向……在我查找资料的时候,发现了一个实时地图的示例程序 realtimemap-go,它是Actor模型框架 Proto.Actor 的展示程序。该示例程序显示的是芬兰首都赫尔辛基公共交通车辆的实时位置。
Proto.Actor,它是一种用于 Go、C# 和 Java/Kotlin 的超快速分布式 Actor 解决方案。你可能会问,那为什么不用它来进行开发?因为,它实现起来太复杂了,维护起来就更加复杂。如果你用过Erlang编程语言,那么你就能够深深体会到当中的困难。
Proto.Actor该示例有一个在线演示:https://realtimemap.skyrise.cloud/
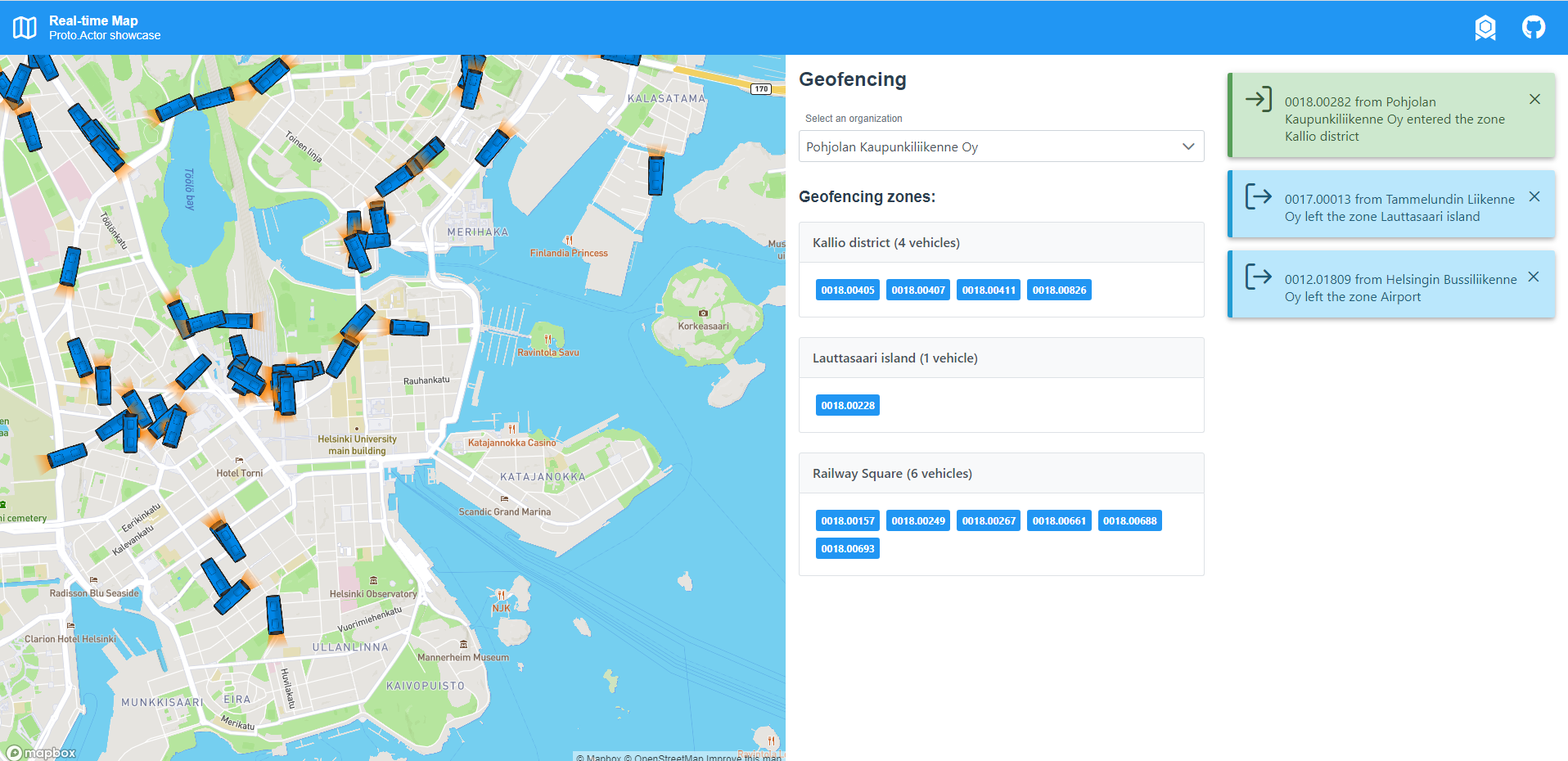
该示例程序有以下特性:
- 车辆的实时位置;
- 车辆的轨迹;
- 地理围栏通知(车辆进出该地理区域);
- 每个公交公司在地理围栏区域的车辆;
- 水平缩放。
本文基于此示例程序,在Kratos下面重新实现了一遍。
先决条件
示例程序的后端基于Kratos微服务框架开发,需要有一定的Kratos的基础。前端基于Vue3和Typescript进行开发,需要有一定的相关基础。
它是如何工作的?
- 设备使用MQTT通讯协议将数据推送给服务端;
- 服务端使用REST和Websocket将设备数据推送给前端。
服务端基于Kratos框架进行开发,为了简便演示,本示例只有一个单体服务,实际运用时,拆分服务也是容易的。
服务端接收MQTT数据
数据源
由于这个应用程序是关于跟踪车辆的,我们需要从某个地方获取它们的位置。在此应用程序中,位置是从赫尔辛基地区交通局的高频车辆定位 MQTT 代理接收的。有关数据的更多信息:
此数据已根据 © Helsinki Region Transport 2021、Creative Commons BY 4.0 International 获得许可
Topic的定义如下:
0/1 /2 /3 /4 /5 /6 /7 /8 /9 /10 /11 /12 /13 /14 /15 /16
/////////////////# Topic的Go定义:
type Topic struct {
Prefix string // /hfp/ is the root of the topic tree.
Version string // v2 is the current version of the HFP topic and the payload format.
JourneyType string // The type of the journey. Either journey, deadrun or signoff.
TemporalType string // The status of the journey, ongoing or upcoming.
EventType string // One of vp, due, arr, dep, ars, pde, pas, wait, doo, doc, tlr, tla, da, dout, ba, bout, vja, vjout.
TransportMode string // The type of the vehicle. One of bus, tram, train, ferry, metro, ubus (used by U-line buses and other vehicles with limited realtime information) or robot (used by robot buses).
// operator_id/vehicle_number uniquely identifies the vehicle.
OperatorId string // The unique ID of the operator that owns the vehicle.
VehicleNumber string // The vehicle number that can be seen painted on the side of the vehicle, often next to the front door. Different operators may use overlapping vehicle numbers.
RouteId string // The ID of the route the vehicle is running on.
DirectionId string // The line direction of the trip, either 1 or 2.
Headsign string // The destination name, e.g. Aviapolis.
StartTime string // The scheduled start time of the trip
NextStop string // The ID of next stop or station.
GeohashLevel string // The geohash level represents the magnitude of change in the GPS coordinates since the previous message from the same vehicle.
Geohash string // The latitude and the longitude of the vehicle.
Sid string // Junction ID, corresponds to sid in the payload.
}载体数据结构定义如下:
package hfp
type Payload struct {
Longitude *float64 `json:"long"` // 经度(WGS84)
Latitude *float64 `json:"lat"` // 纬度(WGS84)
Heading *int32 `json:"hdg"` // 朝向角度[0, 360]
DoorState *int32 `json:"drst"` // 门状态 0:所有门都已关闭 1:有门打开
Timestamp *time.Time `json:"tst"` // 时间戳
Speed *float64 `json:"spd"` // 车速(m/s)
Odometer *int32 `json:"odo"` // 里程(m)
}
type Event struct {
VehicleId string // 车辆ID
OperatorId string // 司机ID
VehiclePosition *Payload `json:"VP"` // 坐标
DoorOpen *Payload `json:"DOO"` // 开门
DoorClosed *Payload `json:"DOC"` // 关门
}需要注意的是,我测试时发现,MQTT接收数据时只要接收一段时间就自动断开了,一开始我还以为是我这边出问题了,后来做了一些测试才发现,是对方限制了使用,应该是测试账号的ClientID只允许接收一定时长的数据。
编写代码
首先创建MQTT服务端,它本质上是一个MQTT的客户端,它具有全双工、双向的数据流,所以实现为服务端也并无问题。
package server
import (
"context"
"github.com/go-kratos/kratos/v2/log"
"github.com/tx7do/kratos-transport/transport/mqtt"
"kratos-realtimemap/app/admin/internal/conf"
"kratos-realtimemap/app/admin/internal/service"
)
// NewMQTTServer create a mqtt server.
func NewMQTTServer(c *conf.Server, _ log.Logger, svc *service.AdminService) *mqtt.Server {
ctx := context.Background()
srv := mqtt.NewServer(
mqtt.WithAddress([]string{c.Mqtt.Addr}),
mqtt.WithCodec("json"),
)
_ = srv.RegisterSubscriber(ctx,
"/hfp/v2/journey/ongoing/vp/bus/#",
registerSensorDataHandler(svc.TransitPostTelemetry),
hfpEventCreator,
)
svc.SetMqttBroker(srv)
return srv
}以上代码创建了一个MQTT的服务器,使用JSON编解码器进行编解码,监听了Topic为/hfp/v2/journey/ongoing/vp/bus/#的MQTT推送消息。
接着实现服务,对设备通过MQTT推送的消息进行处理:
package service
import (
"context"
"github.com/tx7do/kratos-transport/broker"
"kratos-realtimemap/api/hfp"
"kratos-realtimemap/app/admin/internal/pkg/data"
)
func (s *RealtimeMapService) SetMqttBroker(b broker.Broker) {
s.mb = b
}
func (s *RealtimeMapService) TransitPostTelemetry(_ context.Context, topic string, headers broker.Headers, msg *hfp.Event) error {
//fmt.Println("Topic: ", topic)
topicInfo := hfp.Topic{}
topicInfo.Parse(topic)
msg.OperatorId = topicInfo.OperatorId
msg.VehicleId = topicInfo.GetVehicleUID()
position := msg.MapToPosition()
if position != nil {
s.positionHistory.Update(position)
turnovers := data.AllOrganizations.Update(position)
s.BroadcastVehicleTurnoverNotification(turnovers)
s.BroadcastVehiclePosition(s.positionHistory.GetPositionsHistory(position.VehicleId))
}
s.log.Infof("事件类型: %s 交通工具类型: %s 司机ID: %s 车辆ID: %s", topicInfo.EventType, topicInfo.TransportMode, topicInfo.OperatorId, msg.VehicleId)
return nil
}以上代码对Topic和载体数据进行了解析,将设备状态存入内存当中,旋即把状态通过Websocket广播给前端。
好了,我们对MQTT的处理就完成了。处理MQTT的课结束,下课!
嗯?这就完了?这么简单?
没错,就这么点代码,就这么的容易,我也想多叨叨几句,扩充点篇幅,只可惜,它确实就是这么容易就搞定了。
服务端推送数据到前端
服务端与前端的通讯主要靠REST和Websocket来实现。那些更新频率不高,实时性要求也不高的数据都可以走REST,由前端主动拉取。而实时性和更新频率都比较高的数据则可以通过Websocket由服务端主动推送。
数据结构
别看设备与服务端的通讯很简单,但是,服务端到前端的数据就复杂多了。有以下数据:
- Organization(组织),指的是汽车的所属公司。
- Geofence(地理围栏),它是地图上的一个几何区域,用于标定汽车的停车场或者运营区域,出入都将会发送一个通知给前端。
- Position(汽车坐标),它是汽车的一个坐标点,包含了汽车在该点上的状态,比如:开关门,速度,朝向等。
- Viewport(视口),它是地图上的一个裁剪矩形,浅显的描述就是你在前端看到的地图区域,前端只接收该视口之内的汽车数据,否则服务器会向前端发送系统所有的汽车数据,不论服务器还是网络都将会吃不消。
- Notification(通知),服务端通知前端一些事件,主要是:汽车进出地理围栏的事件,汽车上线下线通知。
其中,Position和Notification都是通过Websocket推送给前端,其他数据则是前端通过REST主动拉取。
以上数据结构通过Protobuf定义:
syntax = "proto3";
// 地理点
message GeoPoint {
double longitude = 1;// 经度(WGS84)
double latitude = 2;// 纬度(WGS84)
}
// 组织
message Organization {
string id = 1;// 组织ID
string name = 2;// 组织名称
}
// 地理围栏
message Geofence {
string name = 1;// 围栏名称
double radius_in_meters = 2;// 半径长度(圆形地理围栏)
double longitude = 3;// 经度(WGS84)
double latitude = 4;// 纬度(WGS84)
string org_id = 5;// 组织ID
repeated string vehicles_in_zone = 6;// 区域内所有的车辆
}
// 车辆坐标
message Position {
string vehicle_id = 1;// 车辆ID
string org_id = 2;// 组织ID
int64 timestamp = 3;// 时间戳
double longitude = 4;// 经度(WGS84)
double latitude = 5;// 纬度(WGS84)
int32 heading = 6;// 朝向角度[0, 360]
bool doors_open = 7;// 门状态 0:所有门都已关闭 1:有门打开
double speed = 8;// 车速(m/s)
}
// 视口
message Viewport {
GeoPoint south_west = 1;// 西南点(左下点)
GeoPoint north_east = 2;// 东北点(右上点)
}
// 通知
message Notification {
string message = 1;// 通知内容
}REST
像拉取组织列表、获取某一个组织的详情、获取某一车辆的行车轨迹,都属于低频的操作,所以都走REST。
REST的功能是通过gRPC的gateway实现的,所以我们可以通过protobuf来定义API:
syntax = "proto3";
// 实时地图服务
service RealtimeMapService {
// 获取组织列表
rpc ListOrganizations (google.protobuf.Empty) returns (ListOrganizationsReply) {
option (google.api.http) = {
get: "/api/organizations"
};
}
// 获取组织详情
rpc GetOrganization (GetOrganizationReq) returns (GetOrganizationReply) {
option (google.api.http) = {
get: "/api/organizations/{org_id}"
};
}
// 获取车辆轨迹
rpc GetVehicleTrail (GetVehicleTrailReq) returns (GetVehicleTrailReply) {
option (google.api.http) = {
get: "/api/trail/{id}"
};
}
}下面就可以创建REST服务器了:
package server
// NewMiddleware 创建中间件
func NewMiddleware(ac *conf.Auth, logger log.Logger) http.ServerOption {
return http.Middleware(
recovery.Recovery(),
tracing.Server(),
logging.Server(logger),
)
}
// NewHTTPServer new an HTTP server.
func NewHTTPServer(c *conf.Server, ac *conf.Auth, logger log.Logger, s *service.RealtimeMapService) *http.Server {
var opts = []http.ServerOption{
NewMiddleware(ac, logger),
http.Filter(handlers.CORS(
handlers.AllowedHeaders([]string{"" +
"", "Content-Type", "Authorization"}),
handlers.AllowedMethods([]string{"GET", "POST", "PUT", "DELETE", "HEAD", "OPTIONS"}),
handlers.AllowedOrigins([]string{"*"}),
)),
}
if c.Http.Network != "" {
opts = append(opts, http.Network(c.Http.Network))
}
if c.Http.Addr != "" {
opts = append(opts, http.Address(c.Http.Addr))
}
if c.Http.Timeout != nil {
opts = append(opts, http.Timeout(c.Http.Timeout.AsDuration()))
}
srv := http.NewServer(opts...)
h := openapiv2.NewHandler()
srv.HandlePrefix("/q/", h)
v1.RegisterRealtimeMapServiceHTTPServer(srv, s)
return srv
}其服务很简单,也就是一些非常简单的内存数据查询:
package service
func (s *RealtimeMapService) ListOrganizations(_ context.Context, _ *emptypb.Empty) (*v1.ListOrganizationsReply, error) {
reply := &v1.ListOrganizationsReply{
Organizations: data.AllOrganizations.MapToBaseInfoArray(),
}
return reply, nil
}
func (s *RealtimeMapService) GetOrganization(_ context.Context, req *v1.GetOrganizationReq) (*v1.GetOrganizationReply, error) {
if org, ok := data.AllOrganizations[req.OrgId]; ok {
return &v1.GetOrganizationReply{
Id: org.Id,
Name: org.Name,
Geofences: org.MapToGeofenceArray(),
}, nil
} else {
return nil, v1.ErrorResourceNotFound(fmt.Sprintf("Organization %s not found", req.OrgId))
}
}
func (s *RealtimeMapService) GetVehicleTrail(_ context.Context, req *v1.GetVehicleTrailReq) (*v1.GetVehicleTrailReply, error) {
his := s.positionHistory.GetVehicleTrail(req.Id)
if his == nil {
return nil, v1.ErrorResourceNotFound(fmt.Sprintf("%s positions history not found", req.Id))
}
return &v1.GetVehicleTrailReply{Positions: his}, nil
}Websocket
Websocket适合需要服务端主动推送消息的应用场景之下。REST肯定是做不到的,长轮询的效率之低下,令人发指。
在Kratos下创建一个Websocket的服务器是容易的,只需要以下代码即可实现:
package server
import (
"github.com/go-kratos/kratos/v2/log"
"github.com/tx7do/kratos-transport/transport/websocket"
"kratos-realtimemap/app/admin/internal/conf"
"kratos-realtimemap/app/admin/internal/service"
)
// NewWebsocketServer create a websocket server.
func NewWebsocketServer(c *conf.Server, _ log.Logger, svc *service.RealtimeMapService) *websocket.Server {
srv := websocket.NewServer(
websocket.WithAddress(c.Websocket.Addr),
websocket.WithPath(c.Websocket.Path),
websocket.WithConnectHandle(svc.OnWebsocketConnect),
websocket.WithCodec("json"),
)
svc.SetWebsocketServer(srv)
return srv
}向前端推送消息,我简单处理了,调用Broadcast方法直接广播全部前端了:
func (s *RealtimeMapService) BroadcastToWebsocketClient(eventId string, payload interface{}) {
if payload == nil {
return
}
bufPayload, _ := json.Marshal(&payload)
var proto v1.WebsocketProto
proto.EventId = eventId
proto.Payload = string(bufPayload)
bufProto, _ := json.Marshal(&proto)
var msg websocket.Message
msg.Body = bufProto
s.ws.Broadcast(websocket.MessageType(v1.MessageType_Notify), &msg)
}只有两个推送:
BroadcastVehiclePosition方法是推送车辆的位置信息的:
func (s *RealtimeMapService) BroadcastVehiclePosition(positions data.PositionArray) {
s.BroadcastToWebsocketClient("positions", positions)
}BroadcastVehicleTurnoverNotification是推送车辆进出物理围栏通知的:
func (s *RealtimeMapService) BroadcastVehicleTurnoverNotification(turnovers data.TurnoverArray) {
for _, turnover := range turnovers {
var str string
if turnover.Status {
str = fmt.Sprintf("%s from %s entered the zone %s",
turnover.VehicleId, turnover.OrganizationName, turnover.GeofenceName)
} else {
str = fmt.Sprintf("%s from %s left the zone %s",
turnover.VehicleId, turnover.OrganizationName, turnover.GeofenceName)
}
s.BroadcastToWebsocketClient("notification", str)
}
}在程序里面,我们只处理了一个前端推送的消息,是前端视口改变的更新消息:
func (s *RealtimeMapService) OnWebsocketMessage(sessionId websocket.SessionID, message *websocket.Message) error {
s.log.Infof("[%s] Payload: %s\n", sessionId, string(message.Body))
var proto v1.WebsocketProto
if err := json.Unmarshal(message.Body, &proto); err != nil {
s.log.Error("Error unmarshalling proto json %v", err)
return nil
}
switch proto.EventId {
case "viewport":
var msg v1.Viewport
if err := json.Unmarshal([]byte(proto.Payload), &msg); err != nil {
s.log.Error("Error unmarshalling payload json %v", err)
return nil
}
_ = s.OnWsSetViewport(sessionId, &msg)
}
return nil
}
func (s *RealtimeMapService) OnWsSetViewport(sessionId websocket.SessionID, msg *v1.Viewport) error {
s.viewports[sessionId] = msg
return nil
}到这里,服务端基本上就实现了。虽然还很粗糙,但是该有的功能是实现了。
实现前端
前端基于Vue.js和Typescript开发。
REST客户端
REST客户端基于axios封装而成:
import axios, { AxiosInstance, AxiosRequestConfig } from 'axios';
import {deepMerge} from '@/util';
export interface CreateAxiosOptions extends AxiosRequestConfig {
authenticationScheme?: string;
}
export class VAxios {
private axiosInstance: AxiosInstance;
private readonly options: CreateAxiosOptions;
constructor(options: CreateAxiosOptions) {
this.options = options;
this.axiosInstance = axios.create(options);
}
private createAxios(config: CreateAxiosOptions): void {
this.axiosInstance = axios.create(config);
}
getAxios(): AxiosInstance {
return this.axiosInstance;
}
configAxios(config: CreateAxiosOptions) {
if (!this.axiosInstance) {
return;
}
this.createAxios(config);
}
setHeader(headers: any): void {
if (!this.axiosInstance) {
return;
}
Object.assign(this.axiosInstance.defaults.headers, headers);
}
get<T = any>(url: string): Promise<T> {
return this.axiosInstance.get(url);
}
}
function createAxios(opt?: Partial<CreateAxiosOptions>) {
return new VAxios(
deepMerge(
{
authenticationScheme: '',
withCredentials: false,
timeout: 10 * 1000,
baseURL: process.env.VUE_APP_API_URL || 'http://localhost:8800/api/',
headers: {
'Content-Type': 'application/json;charset=UTF-8',
},
// 配置项,下面的选项都可以在独立的接口请求中覆盖
requestOptions: {
// 默认将prefix 添加到url
joinPrefix: true,
// 是否返回原生响应头 比如:需要获取响应头时使用该属性
isReturnNativeResponse: false,
// 需要对返回数据进行处理
isTransformResponse: true,
// post请求的时候添加参数到url
joinParamsToUrl: false,
// 格式化提交参数时间
formatDate: true,
// 是否加入时间戳
joinTime: true,
// 忽略重复请求
ignoreCancelToken: true,
// 是否携带token
withToken: true,
},
},
opt || {},
),
);
}
export const apiInstance = createAxios();Websocket客户端
Websocket基于WebSocket类开发:
export interface PositionsDto {
positions: PositionDto[];
}
export interface PositionDto {
vehicle_id: string;
longitude: number;
latitude: number;
heading: number;
speed: number;
doors_open: boolean;
}
export interface WebsocketProto {
event_id: string;
payload: string;
}
export interface GeoPoint {
longitude: number;
latitude: number;
}
export interface Viewport {
southWest: GeoPoint;
northEast: GeoPoint;
}
export interface UpdateViewport {
viewport: Viewport;
}
export interface Notification {
message: string;
}
export interface HubConnection {
setViewport(swLng: number, swLat: number, neLng: number, neLat: number);
onPositions(callback: (positions: PositionDto[]) => void);
onNotification(callback: (notification: string) => void);
disconnect(): Promise<void>;
}
function ByteBufferToObject(buff) {
const enc = new TextDecoder('utf-8');
const uint8Array = new Uint8Array(buff);
const decodedString = enc.decode(uint8Array);
// console.log(decodedString);
return JSON.parse(decodedString);
}
function StringToArrayBuffer(str) {
return new TextEncoder().encode(str);
}
class WebsocketConnect implements HubConnection {
private connection: WebSocket;
private onPositionsCallback?: (positions: PositionDto[]) => void;
private onNotificationCallback?: (notification: string) => void;
constructor() {
const wsURL = `ws://localhost:7700/`;
this.connection = new WebSocket(wsURL);
this.connection.binaryType = 'arraybuffer';
this.connection.onopen = this.onWebsocketOpen.bind(this);
this.connection.onerror = this.onWebsocketError.bind(this);
this.connection.onmessage = this.onWebsocketMessage.bind(this);
this.connection.onclose = this.onWebsocketClose.bind(this);
}
onWebsocketOpen(event) {
console.log('ws连接成功', event);
}
onWebsocketError(event) {
console.error('ws错误', event);
}
onWebsocketMessage(event) {
const proto = ByteBufferToObject(event.data);
// console.log(proto);
const data = JSON.parse(proto['payload']);
// console.log(data);
const eventId = proto['event_id'];
if (eventId == 'positions') {
if (this.onPositionsCallback != null) {
this.onPositionsCallback(data);
}
} else if (eventId == 'notification') {
if (this.onNotificationCallback != null) {
this.onNotificationCallback(data);
}
}
}
onWebsocketClose(event) {
console.log('ws连接关闭', event);
}
sendMessage(eventId, data) {
const x: WebsocketProto = {
event_id: eventId,
payload: JSON.stringify(data),
};
const str = JSON.stringify(x);
// console.log(str);
this.connection.send(StringToArrayBuffer(str));
}
setViewport(swLng: number, swLat: number, neLng: number, neLat: number) {
const x: Viewport = {
southWest: {
longitude: swLng,
latitude: swLat,
},
northEast: {
longitude: neLng,
latitude: neLat,
},
};
this.sendMessage('viewport', x);
}
onPositions(callback: (positions: PositionDto[]) => void) {
this.onPositionsCallback = callback;
}
onNotification(callback: (notification: string) => void) {
this.onNotificationCallback = callback;
}
async disconnect() {
await this.connection.close(1000);
}
}
export const connectToHub = new WebsocketConnect;地图客户端
地图是使用的Mapbox开发的,这一块是直接从realtimemap-go中拷贝出来的。本来是想自己基于高德或者百度地图重新做一个,但是基于坐标系的考虑,就没有采用高德或者百度地图来开发了。
要使用Mapbox,首先需要去 Mapbox 注册一个账号。
然后在mapboxConfig.ts当中把你自己账号的AccessToken填写到mapboxAccessToken常量。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号