
四足机器人姿态控制(通过IMU)
先上效果图,webots下仿真,四足机器人在转动平台上保持机身水平。
下面是姿态解算方法和控制策略:
如下图所示,给定机器人在世界坐标系的机身位置O’(x’,y’,z’)和航海角(roll、pitch、yaw),以及足部末端在世界坐标系下的位置P1、P2、P3、P4点的坐标。我们需要求解的是P1、P2、P3、P4点在机身坐标系Q下的坐标值,进一步可以通过前一节的足端运动学逆解求解电机关节角度。
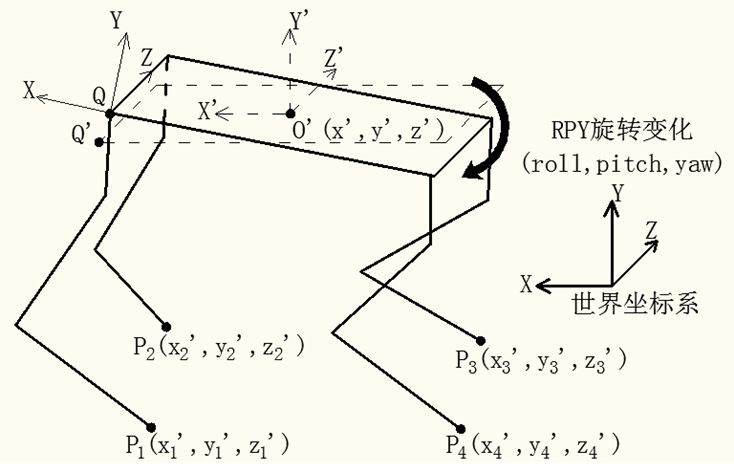
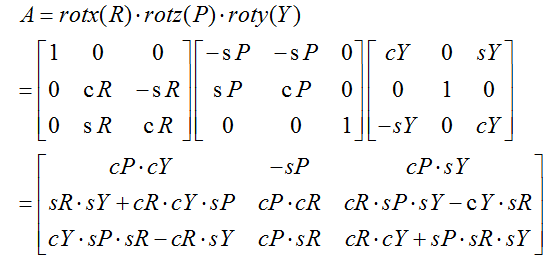
以解算P1坐标为例,首先计算机身目标位置变换的RPY航海角变换矩阵,其中的参数roll、pitch、yaw用R、P、Y简化表示。可得到变换矩阵A:

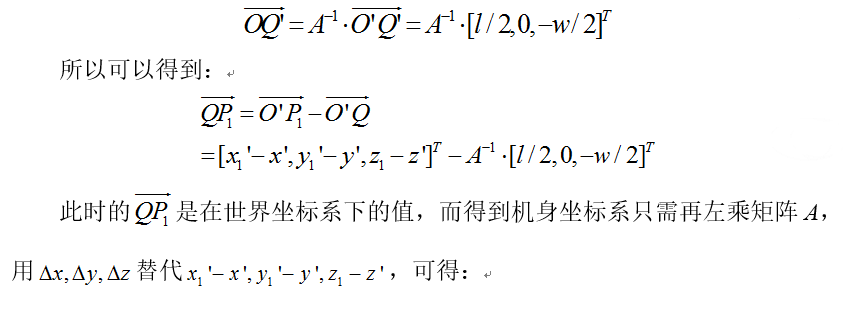
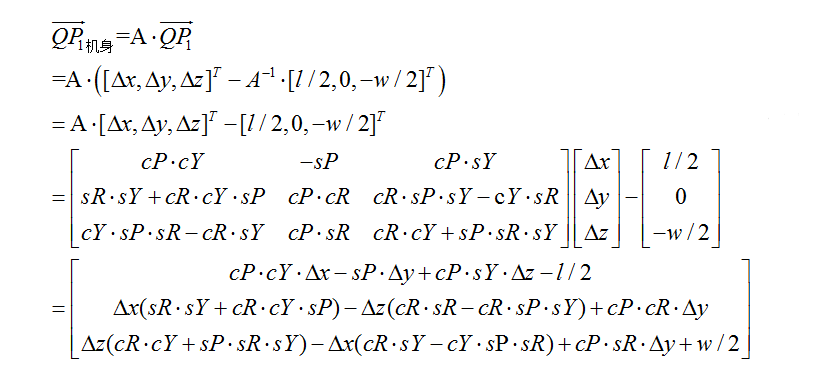
其他腿的逆解过程与此相同,在此不再赘述,将求解出的机身坐标系下的足末端坐标,代入足端逆解公式即公式可求解出电机的控制角度。
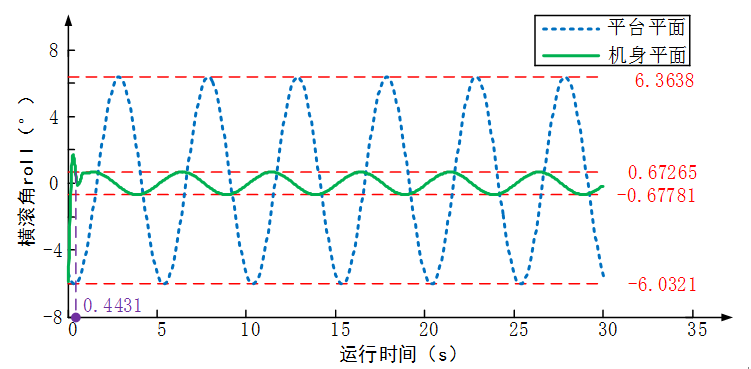
调节方法使用PID调节,由于考虑参数选定的简单性,使用纯P调节,通过多次仿真实验,发现KP = 0.2时调节效果较好。如公式(3-12),其中Rimu、Pimu为IMU(惯性检测单元)测量得到的机身与地面的横滚角与俯仰角差值,每次检测都补偿差值的0.2倍。

具体效果的数据如下图,仿真动画在最前面。
-------------------------------------------------------------------------分隔线-------------------------------------------------------------------------
关注公众号--webots机器人,回复 “webots2019a”,获得百度云下载地址
哼哼[正经脸.jpg] 想获得更多webots仿真教程、教学直播或者webots仿真制定,关注微信公众号--“webots机器人”
--2019.05.29

 浙公网安备 33010602011771号
浙公网安备 33010602011771号