CPU
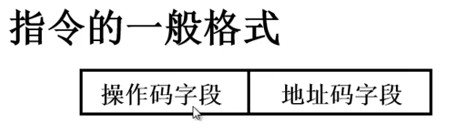
操作码字段:
操作数类型:
即指令要处理的数据的类型
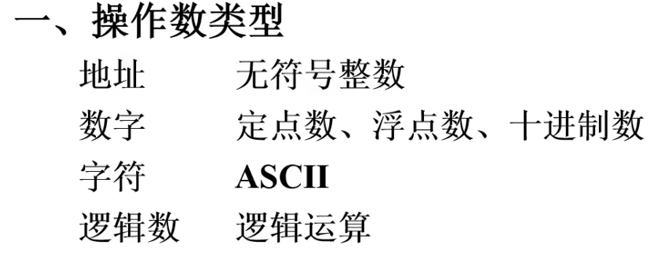
这些数据在存储器中的存储方式为何?可以到存储器那章去复习
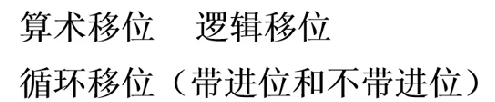
4.转移
5.调用和返回
6.陷阱(中断)
7.输入输出
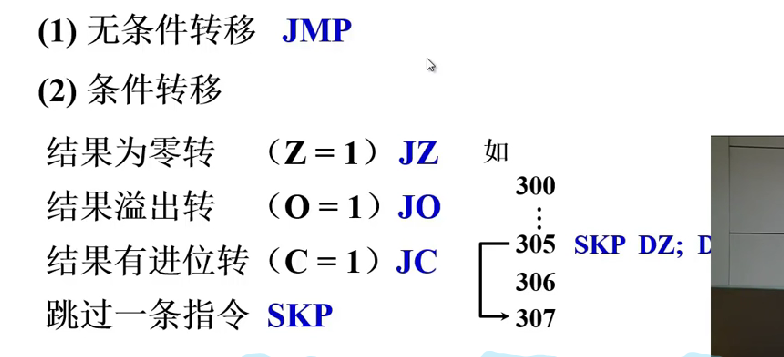
这个顺序 (PC)+1->PC
的+1 应该写成+X比较好
这个X的大小是当前指令占主存单元数量
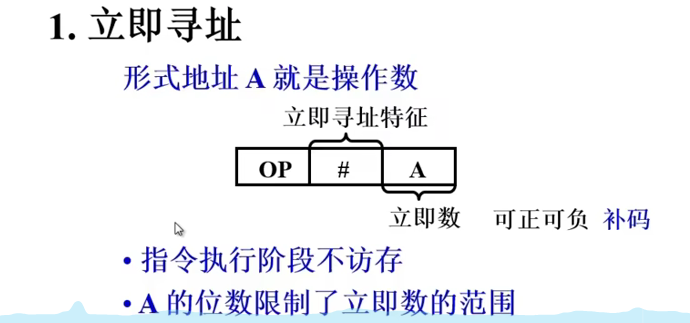
其立即数A本身随着指令就在CPU中,可以不用访存
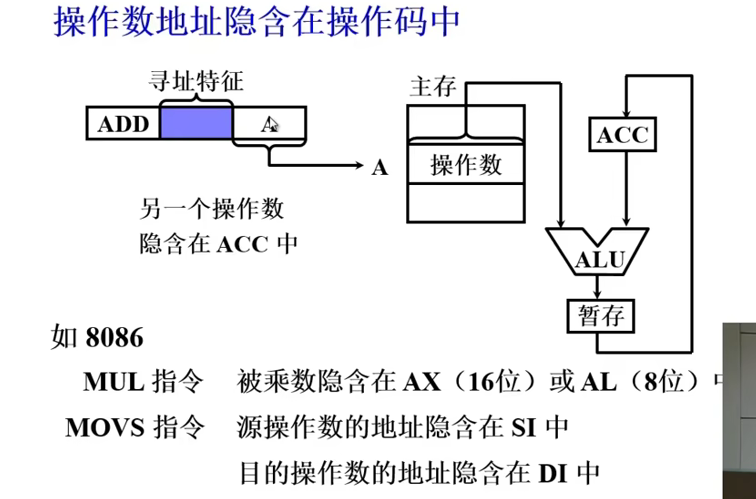
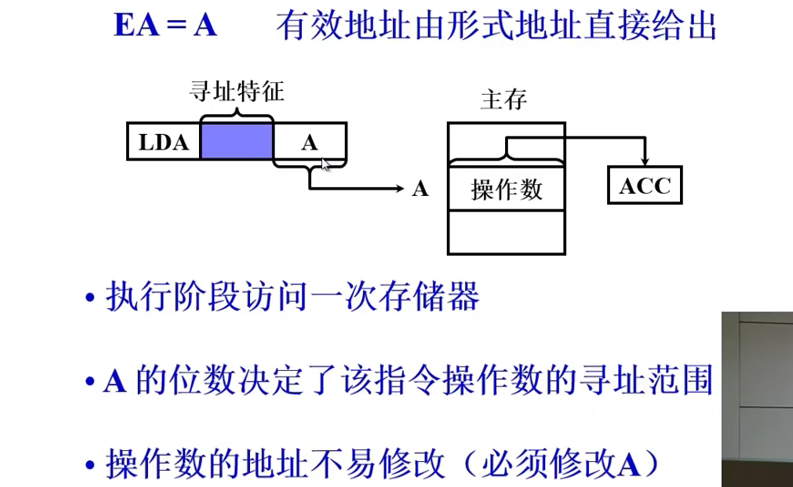
其中一个操作数隐含在ACC(累加器)中,另一个操作数需要到存储器中找
如下是程序调用与返回的案例,
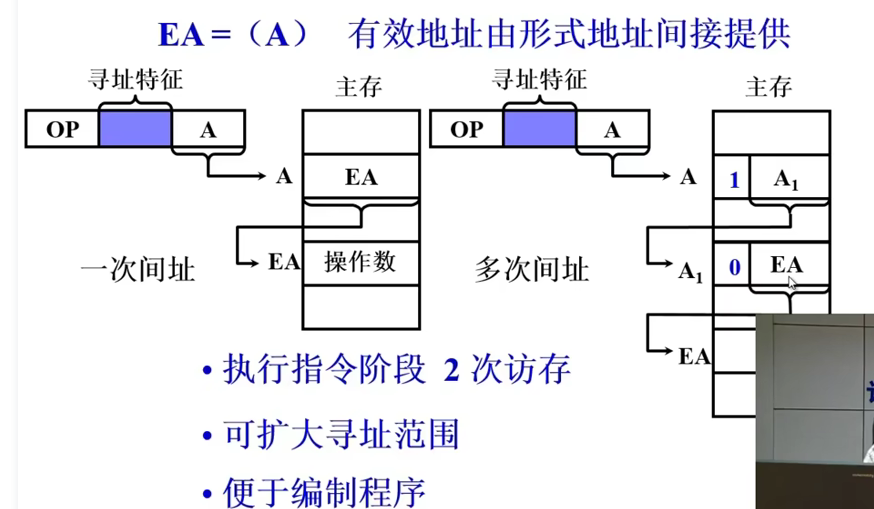
通过间接寻址的方式,即利用A保存的是真正地址
通过A地址中保存的真正地址进行跳转

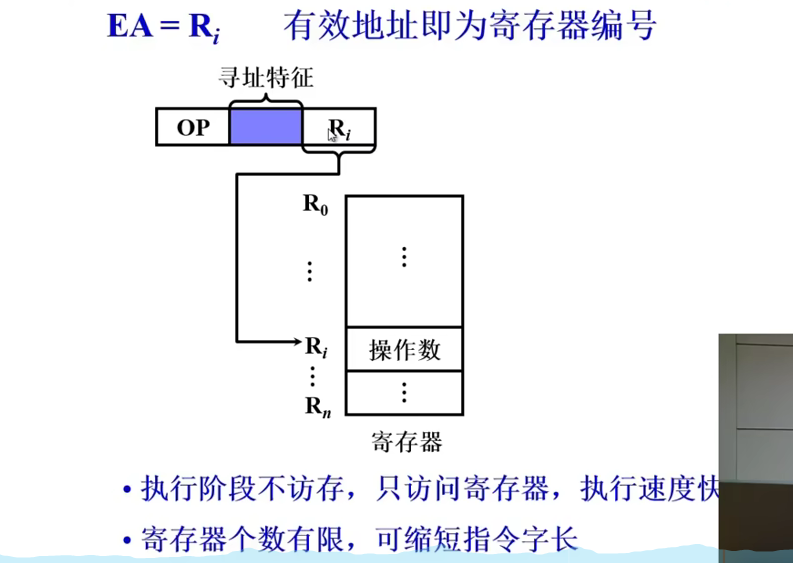
寄存器个数较少,即使地址码较短也没关系
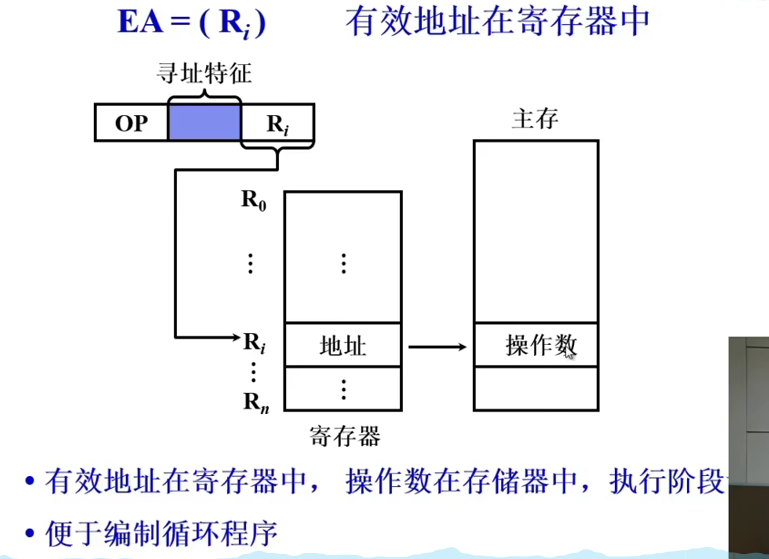
我们想要修改操作数的地址,只要修改寄存器中保存的地址
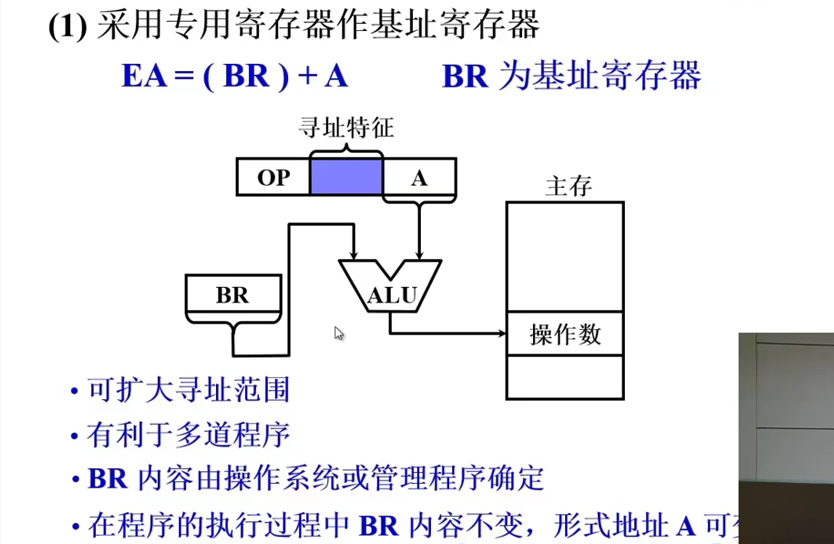
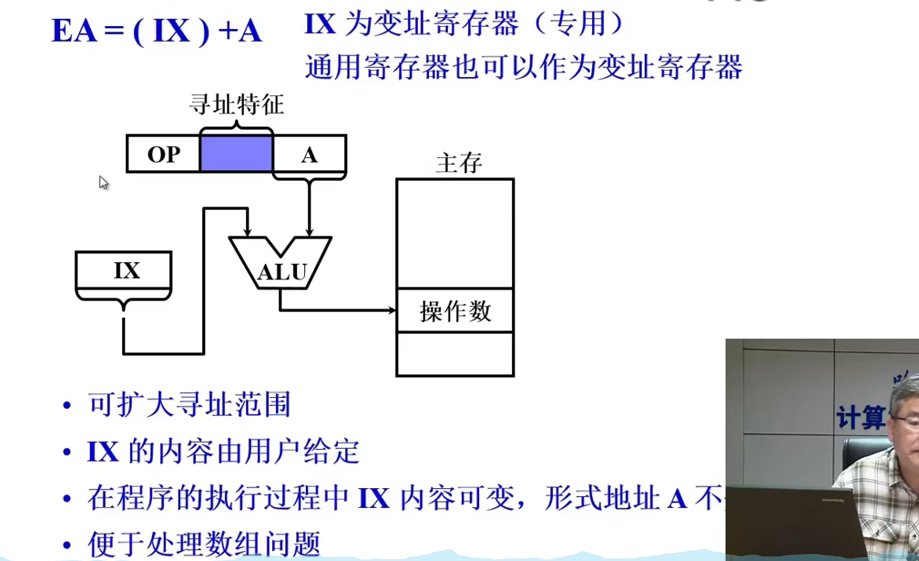
与基址寻址不同的是,IX容易变,A不可变
如果对数组进行操作,A是数组的起始地址
IX可以是下标
与直接寻址的比较:
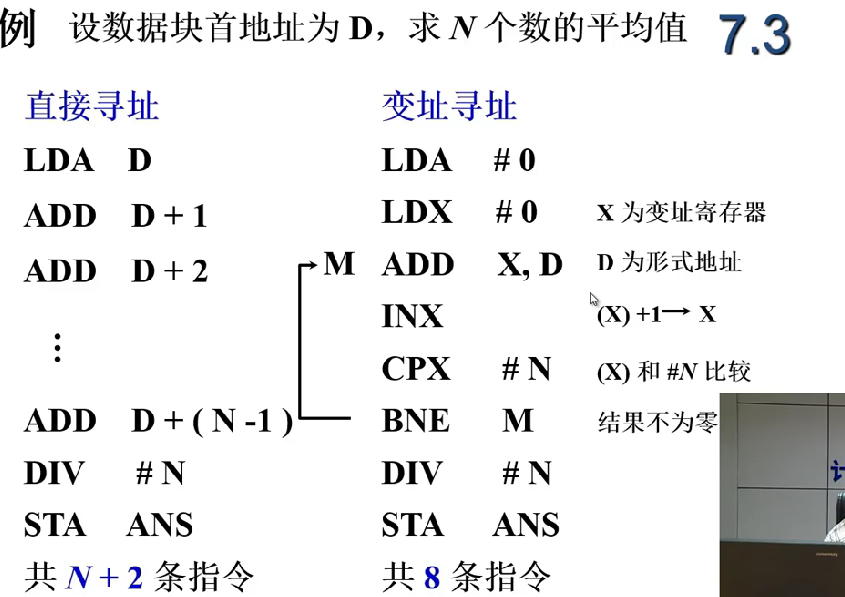
直接寻址一条指令只能指明一个数据
而变址寻址可以通过循环对IX进行变动,达到遍历目的
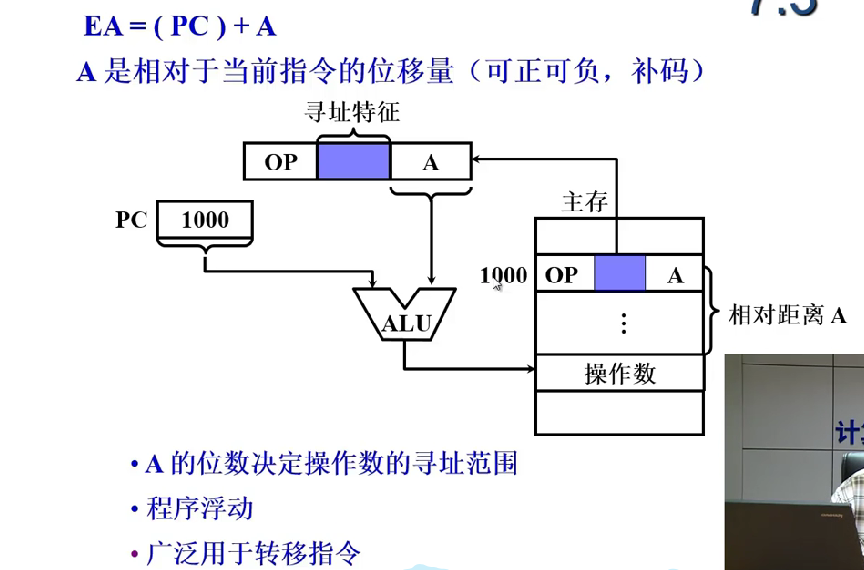
A是偏移量
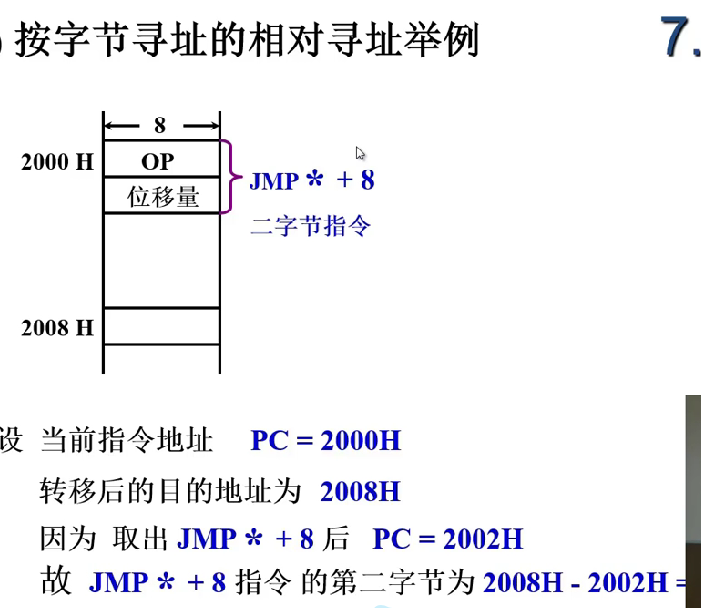
注意PC中的值是在取完一个指令,还没等这条指令运行就变动的
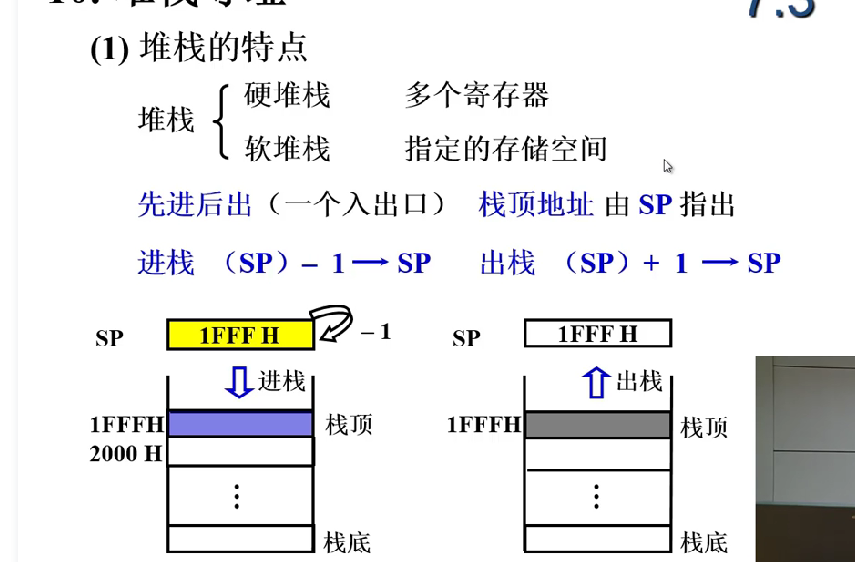
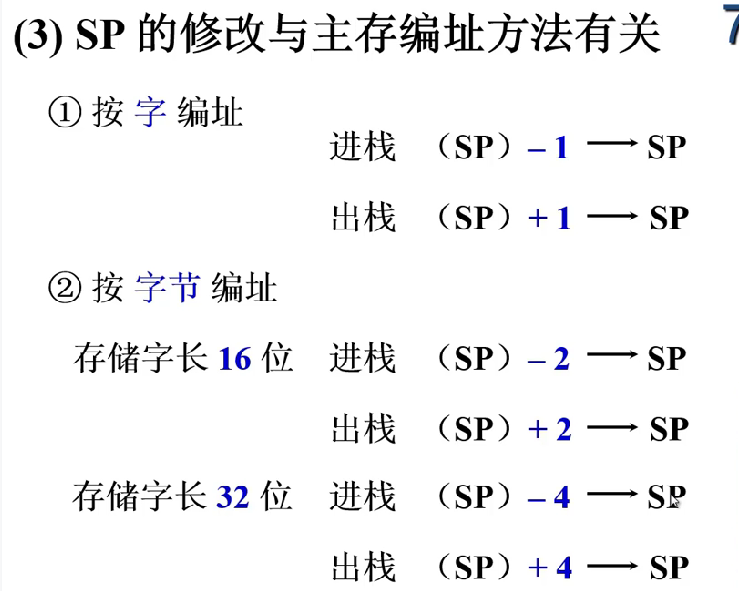
要注意的是SP是从栈底往栈顶中,地址的编码大小不断减小的
解释:
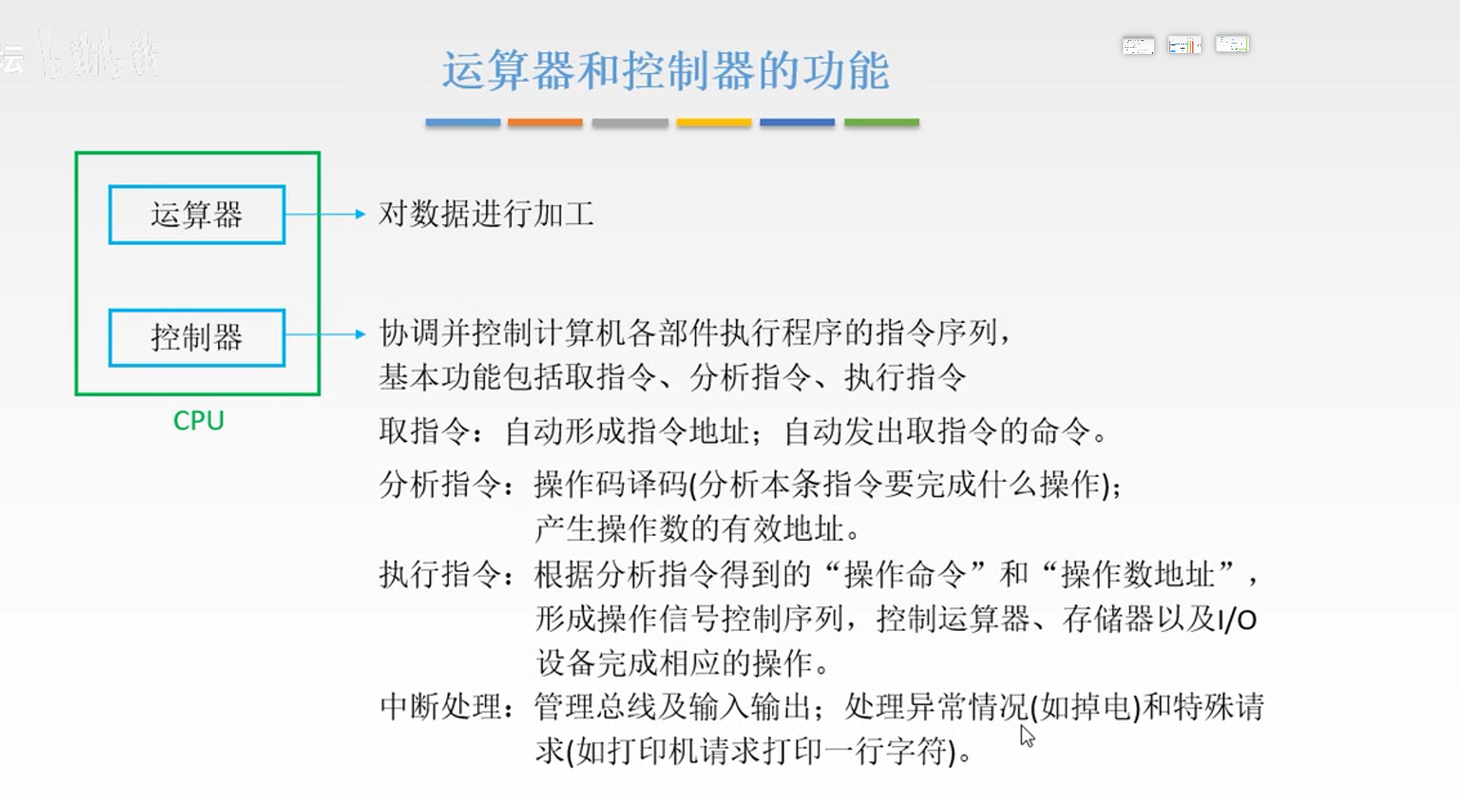
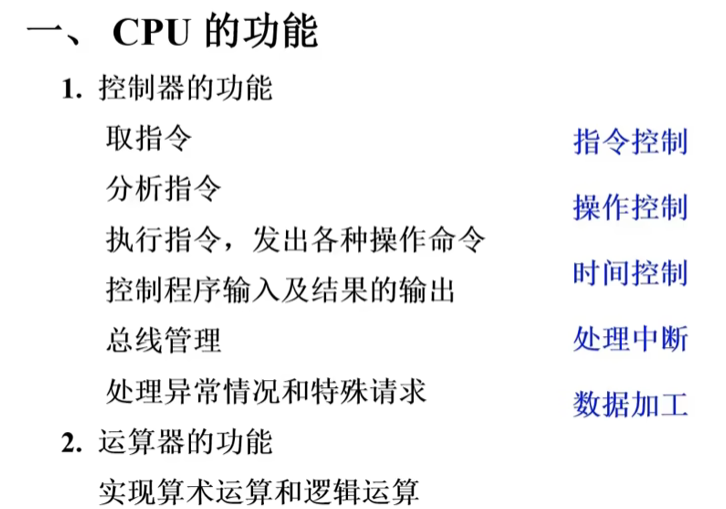
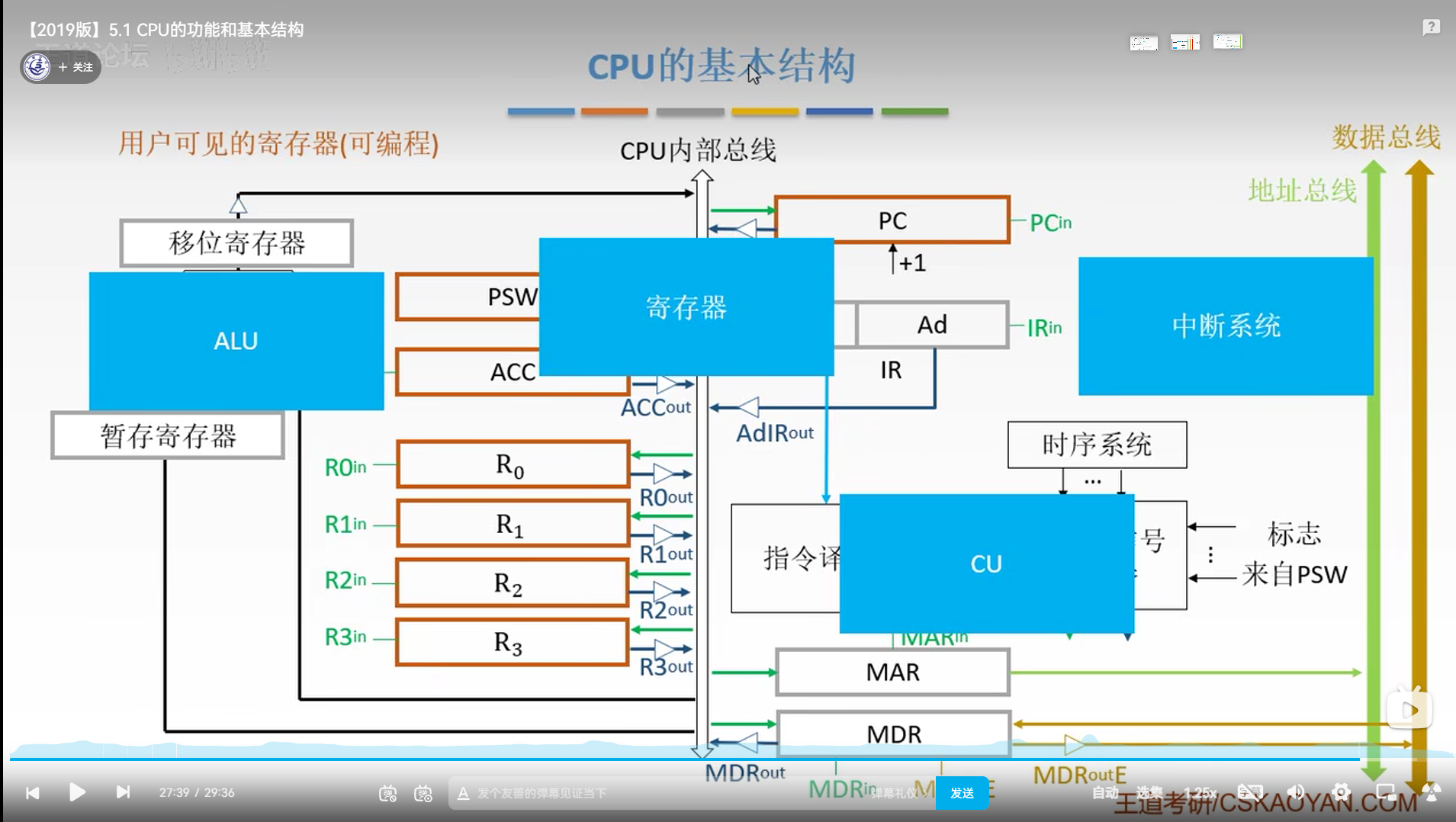
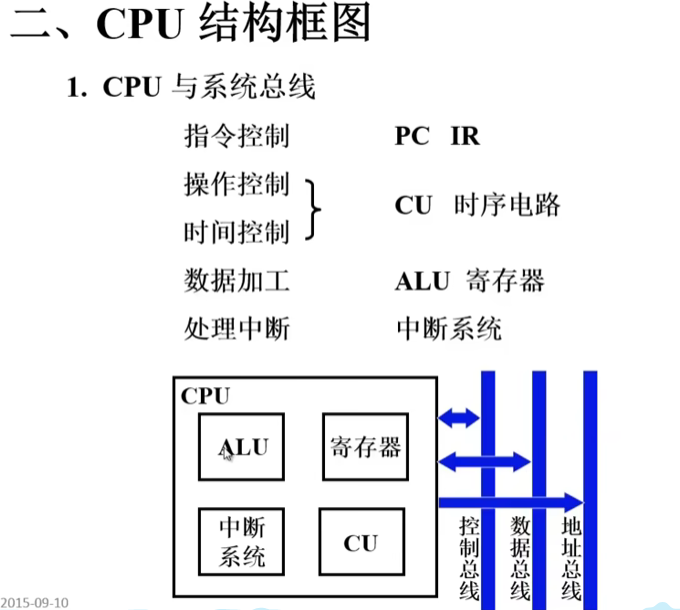
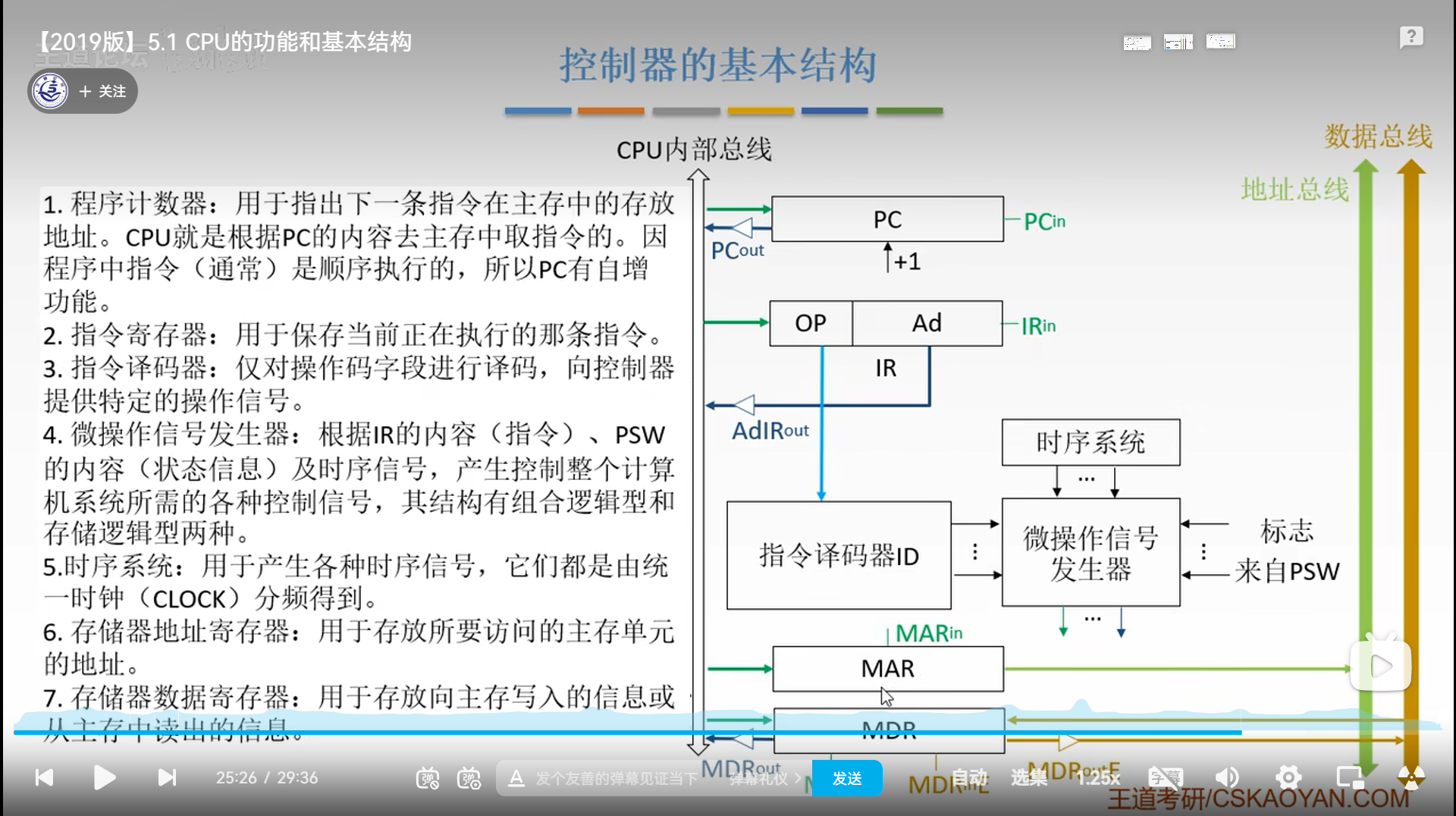
根据CPU的功能得出CPU的结构
1.由于需要到主存中取得指令,需要知道指令的地址,其保存到PC中,
PC的值的改变是在取指周期中进行的
同时指令需要在CPU中暂时保存,其保存在IR(指令寄存器)中
2.操作和时序的控制都需要CU(控制器)来实现
同时CU和操作都受到时序的影响
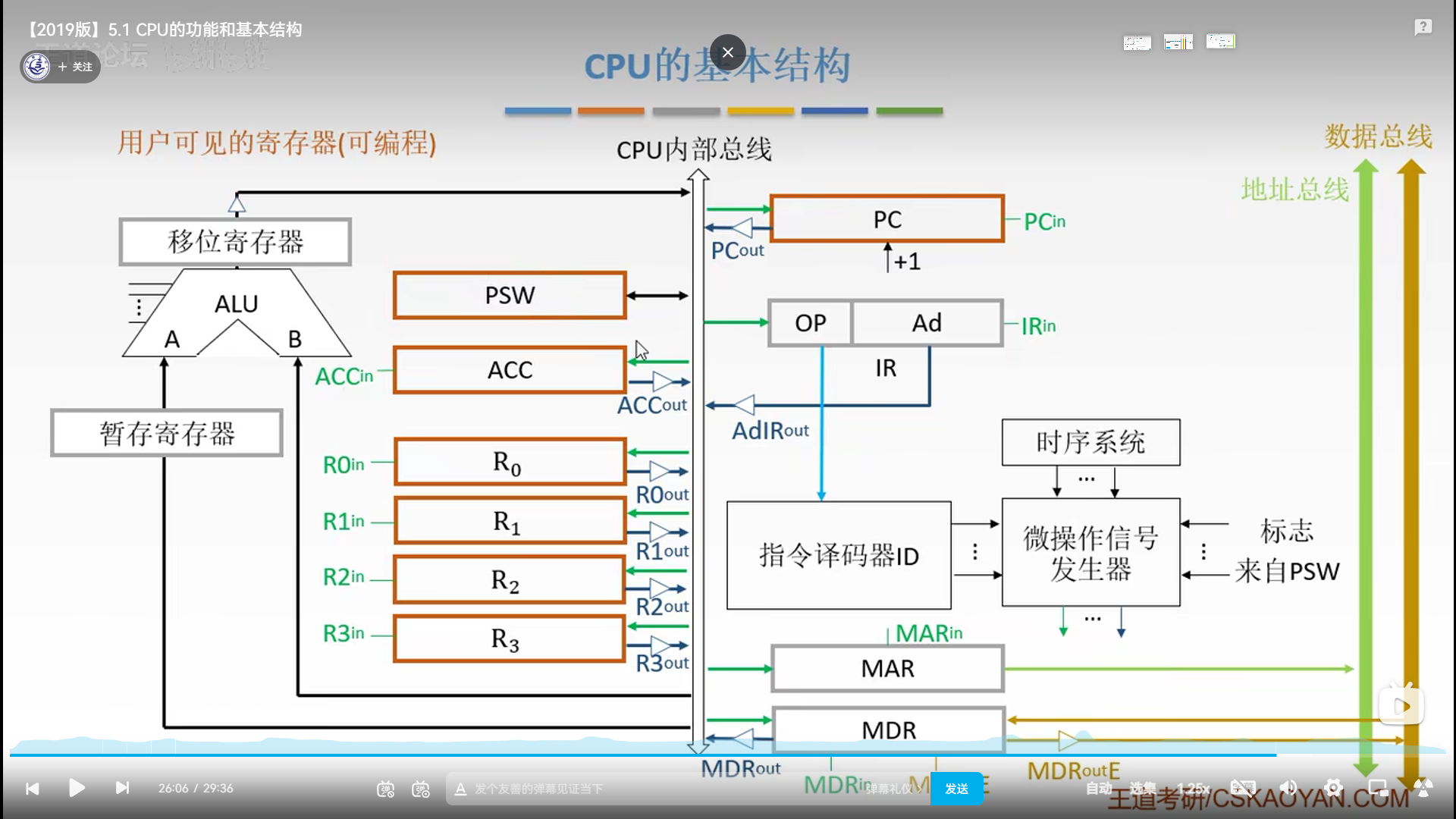
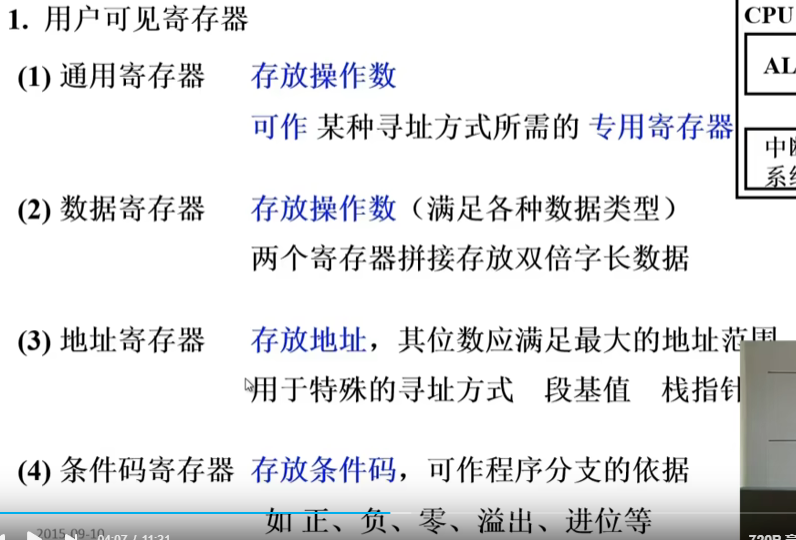
CPU的寄存器:
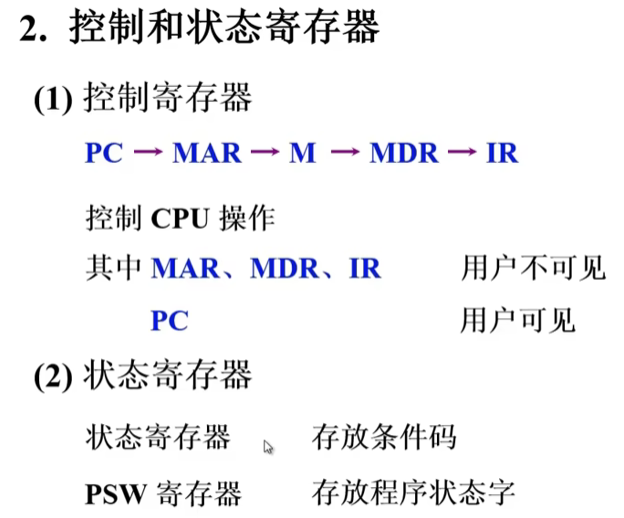
解释:
MAR是主存地址寄存器:
其在CPU中的作用是:
将要访存的地址先保存到MAR中,然后MAR中的数据放到地址总线中
地址总线再给主存发送信息(打通信息传输通道一样的感觉)
MDR是主存数据寄存器:
在CPU中的作用是:
将主存中通过数据总线发送过来的数据保存到MDR中
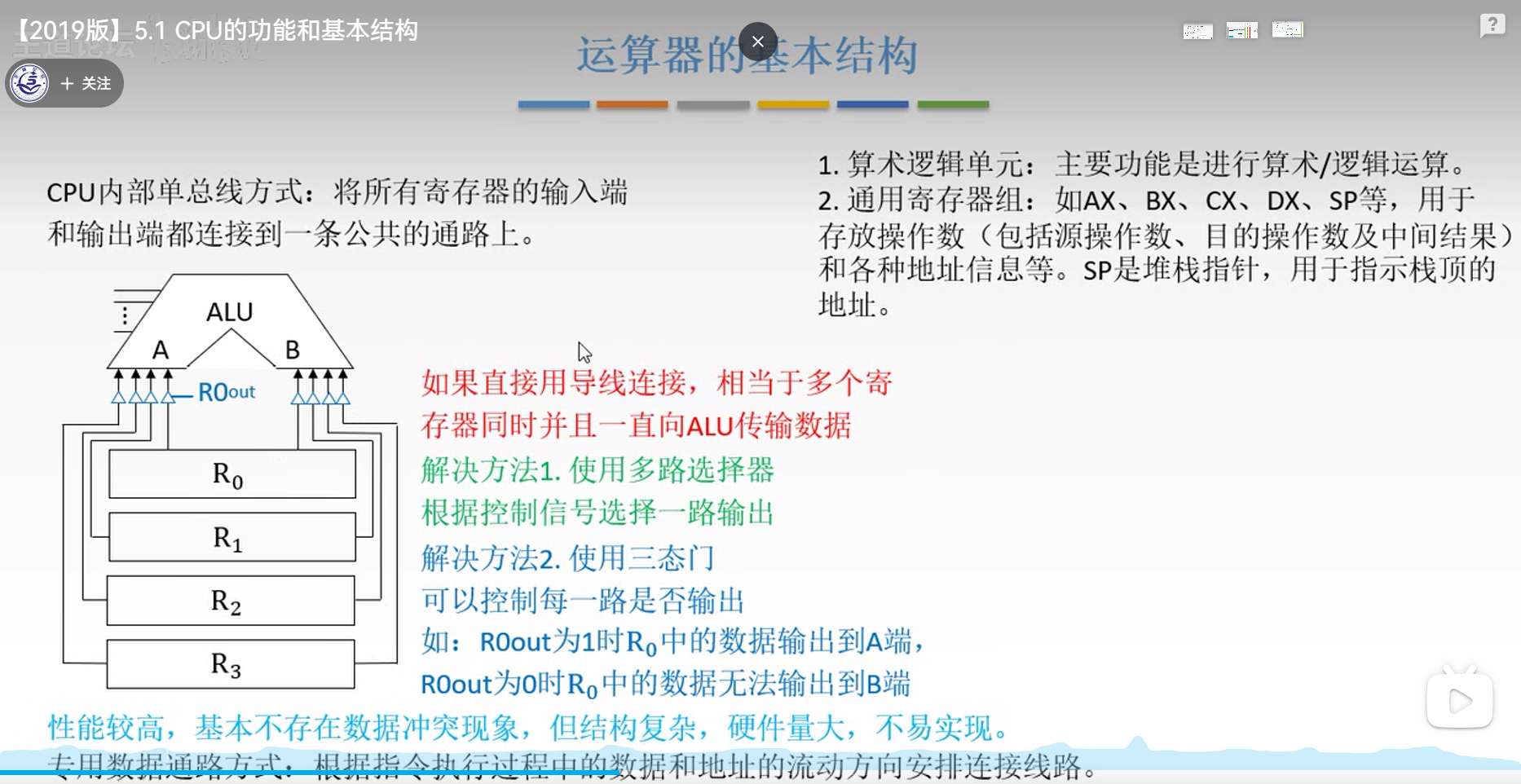
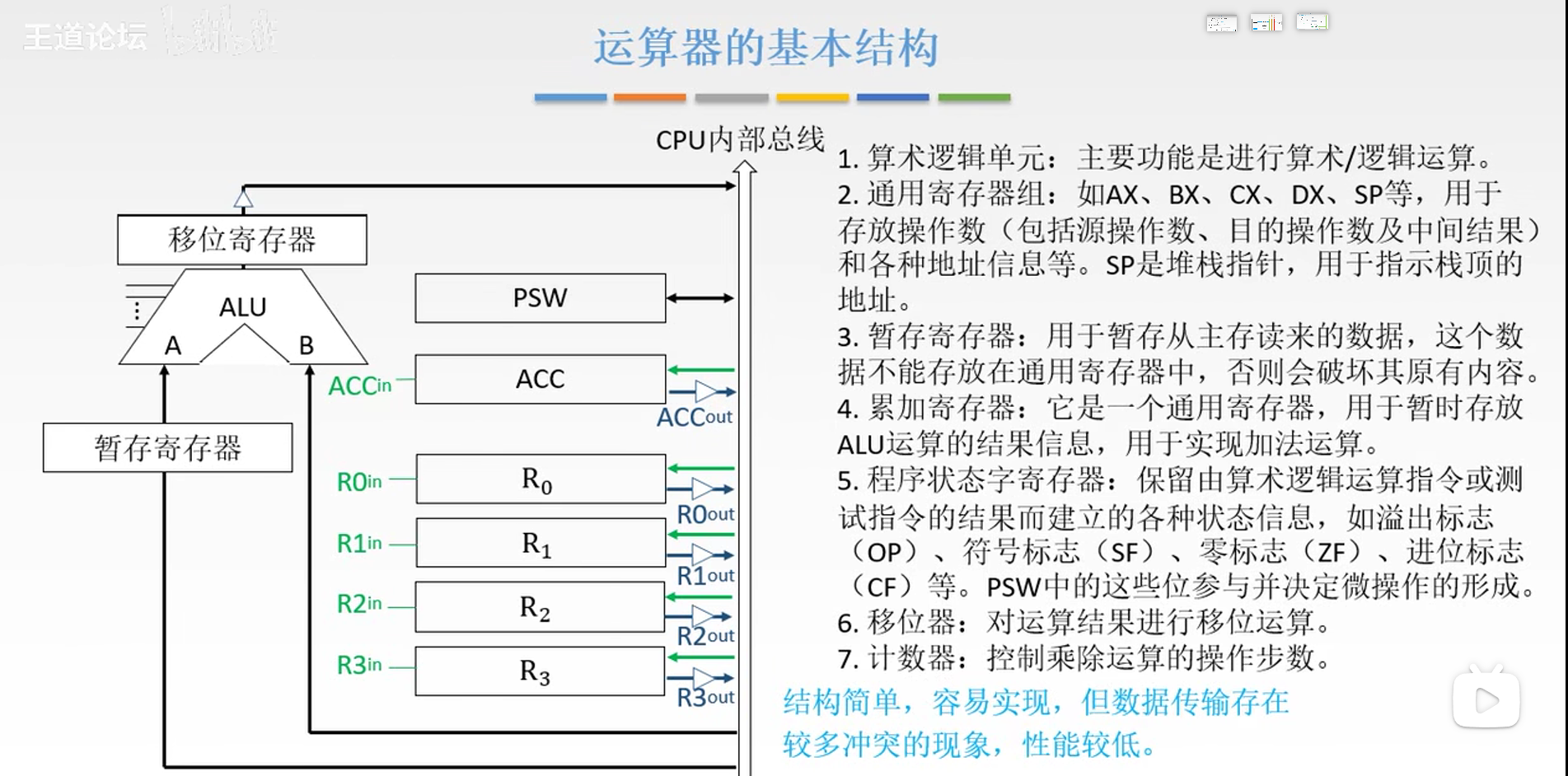
运算器基本结构
控制器的基本结构
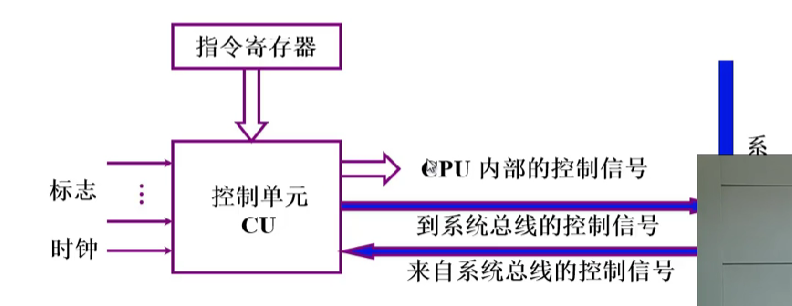
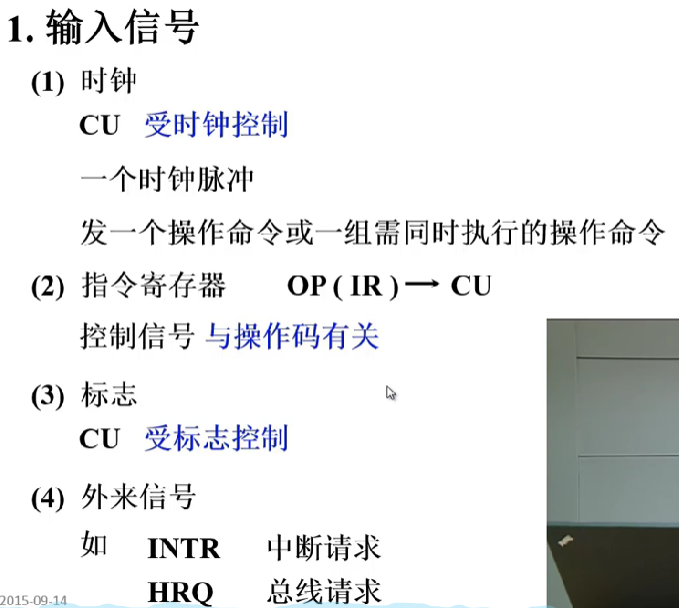
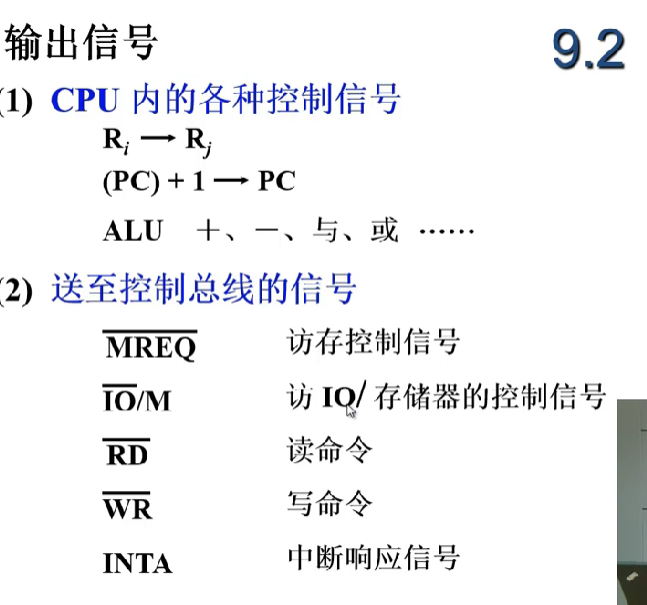
控制单元的输入信号:
控制单元的输出信号:
控制信号的发出:
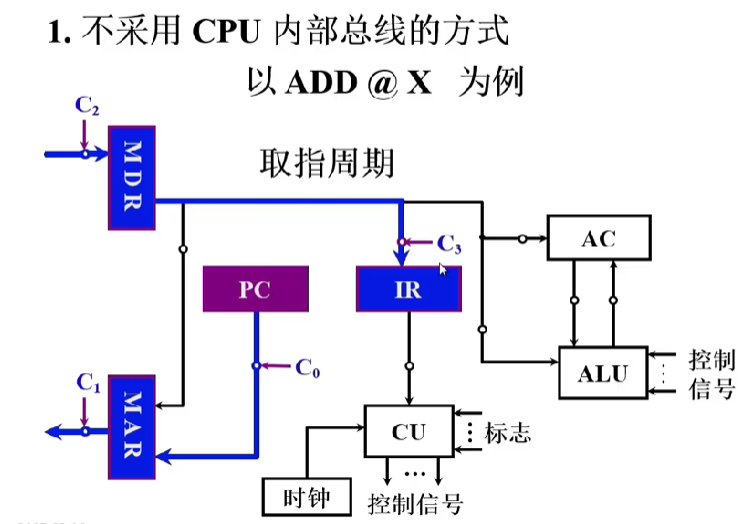
不采用CPU内部总线的方式:
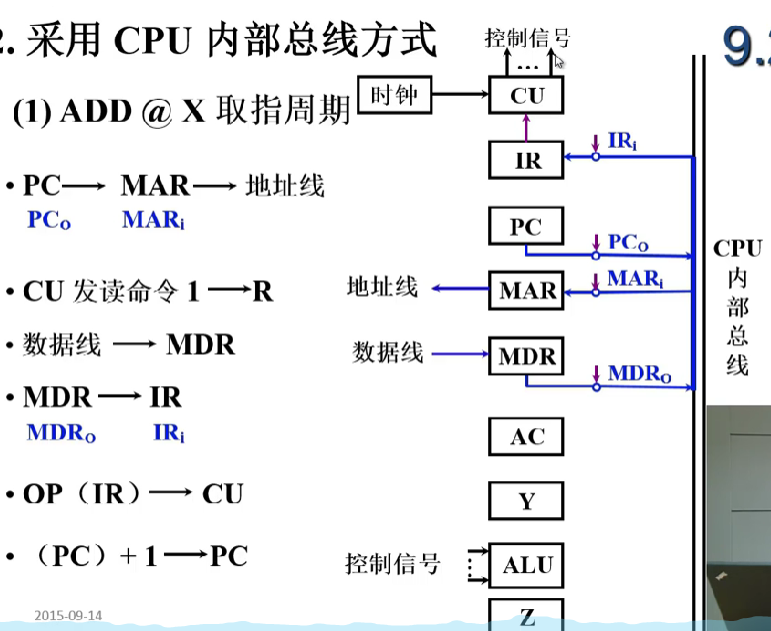
采用CPU内部总线的方式:
指令执行过程
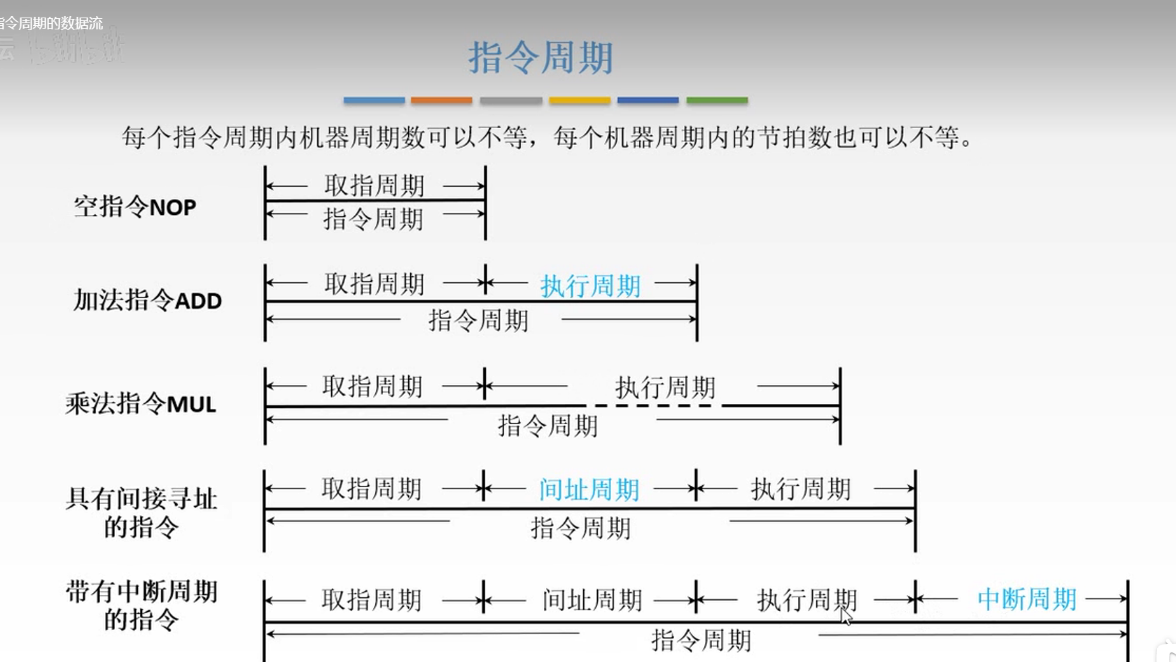
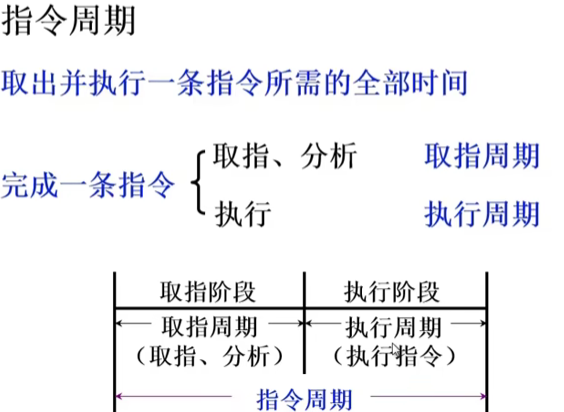
指令周期:
解释:
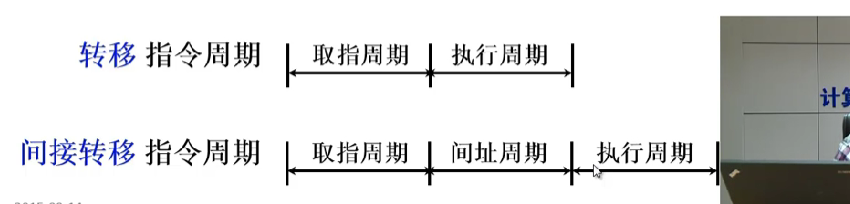
对于间址周期的解释:
如果只有取指周期和执行周期,那么一般
取指周期时就将操作数保存到了CPU中,
执行周期时就直接将操作数拿过来进行操作
或者是再访问一次主存将真正的数据拿过来
但是根据指令那章我们知道,我们还要间接寻址和基址寻址等方式
在指令中的操作数部分不是直接的数据地址或数据
为了找到真正的数据,我们还需要多次访存
如果将这些时间算入执行周期,那么执行周期会十分长
于是我们有了间址周期
间址周期干的事就是找到有效地址
到了执行周期我们就用有效地址在访问一次主存,
找到真正的数据
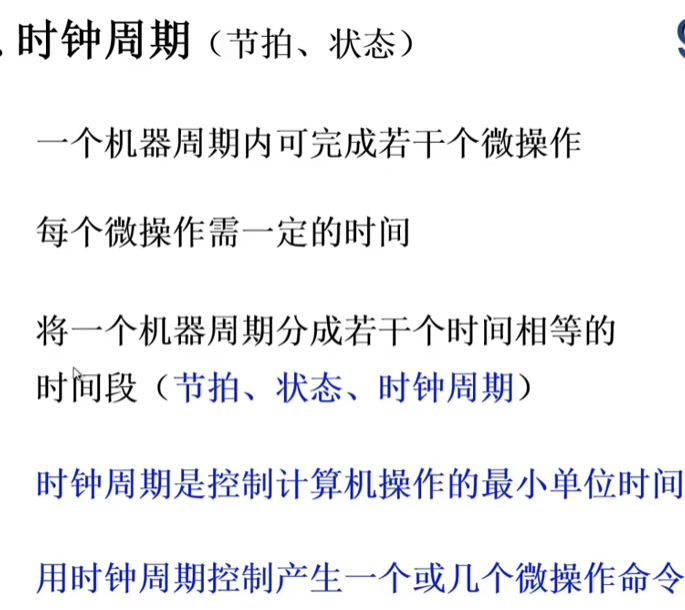
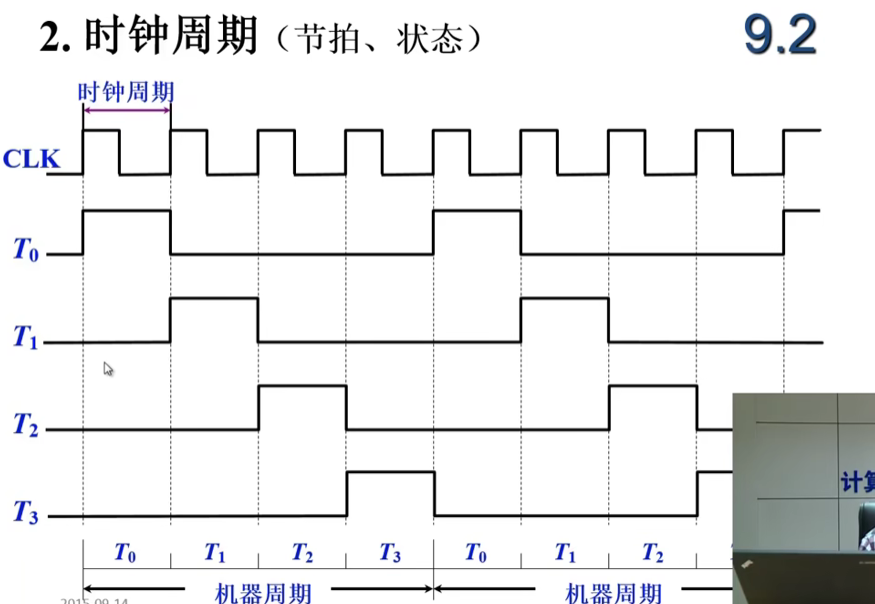
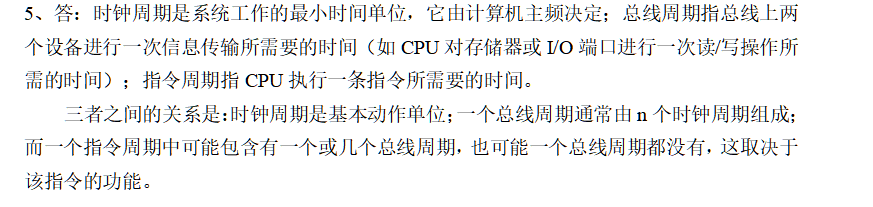
时钟周期:又称为振荡周期,由单片机片内振荡电路OSC产生,常定义为时钟脉冲频率的倒数,是时序中最小的时间单位。
它控制着计算机的工作节奏,使计算机的每一步工作都统一到它的步调上来。
显然,对同一种机型的计算机,时钟频率越高,计算机的工作速度就越快。
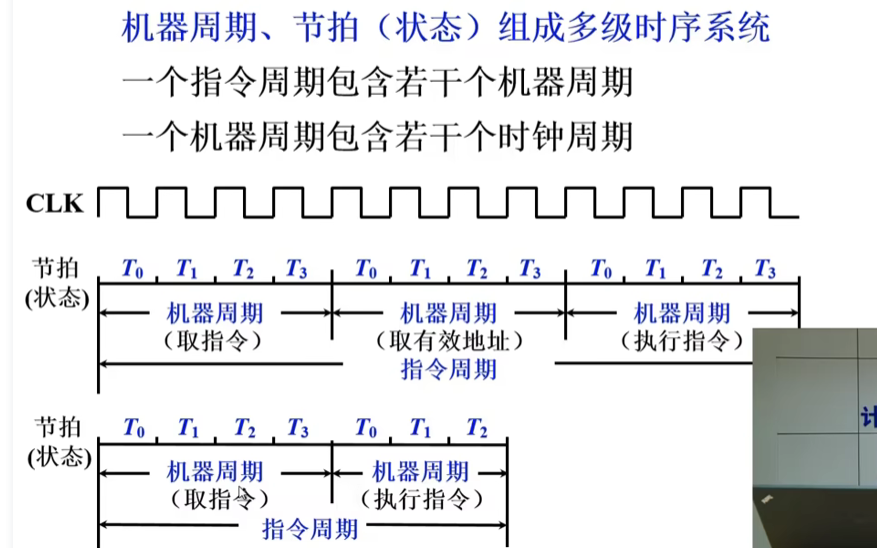
机器周期:也称为CPU周期。在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶段(如取指、译码、执行等),
每一阶段完成一个基本操作。
完成一个基本操作所需要的时间称为机器周期。一般情况下,一个机器周期由若干个时钟周期组成。
指令周期:CPU每取出一条指令并执行这条指令,都要完成一系列的操作,
这一系列操作所需要的时间通常叫做一个指令周期。
换言之指令周期是取出一条指令并执行这条指令的时间。
由于各条指令的操作功能不同,因此各种指令的指令周期是不尽相同的。
机器周期:
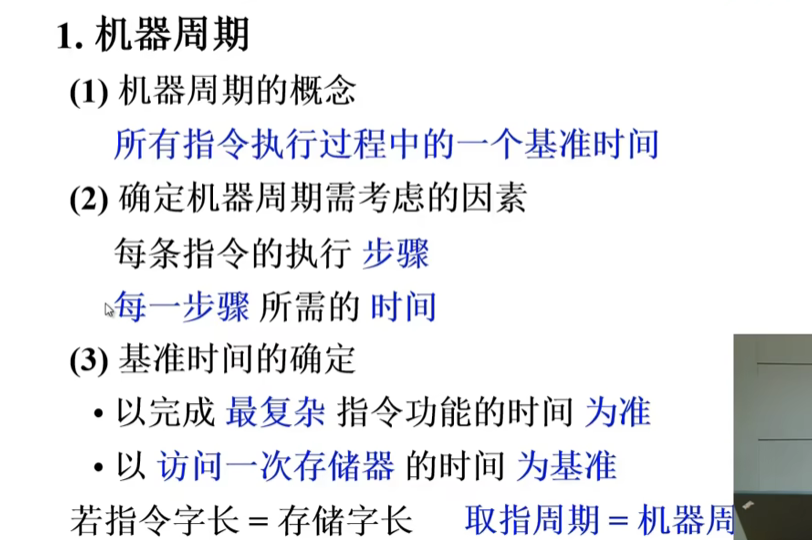
解释:
注意:这里机器周期的概念:所以指令执行过程中的一个基准时间
而不是理解成 所以指令执行过程的总时间
这个基准时间是:所有微操作中最复杂的操作所要花费的时间
一般访存是最花时间的,所以
时钟周期:
工作周期的标志:
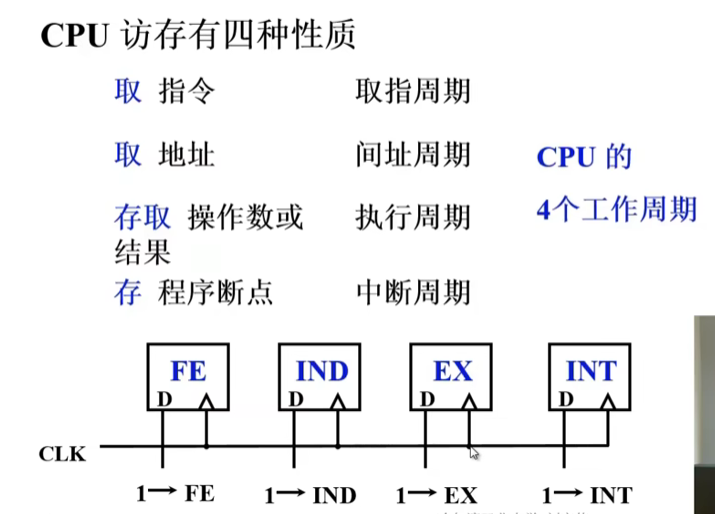
解释:
CPU有四种情况下会进行访存,
为了知晓是哪一种情况下访存(或者说这一次访存的目的是什么)
我们要打上标记
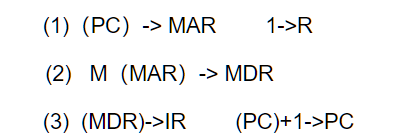
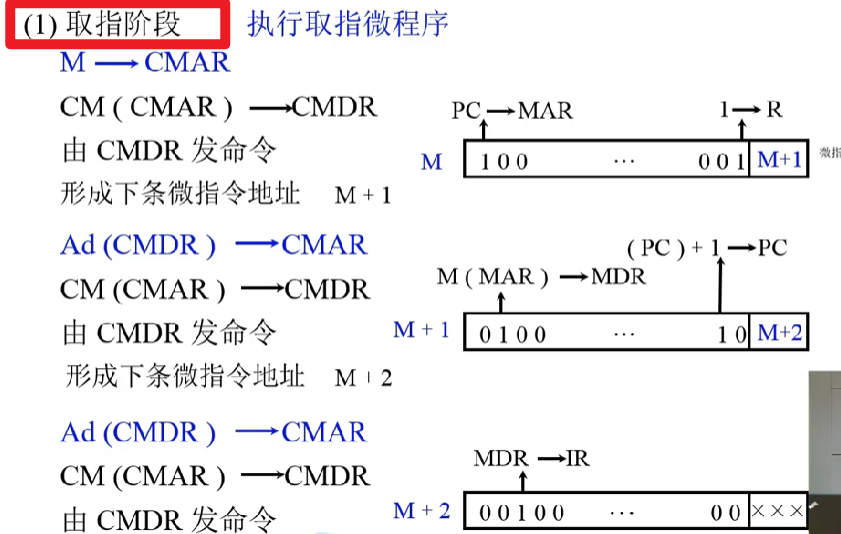
取指周期的操作
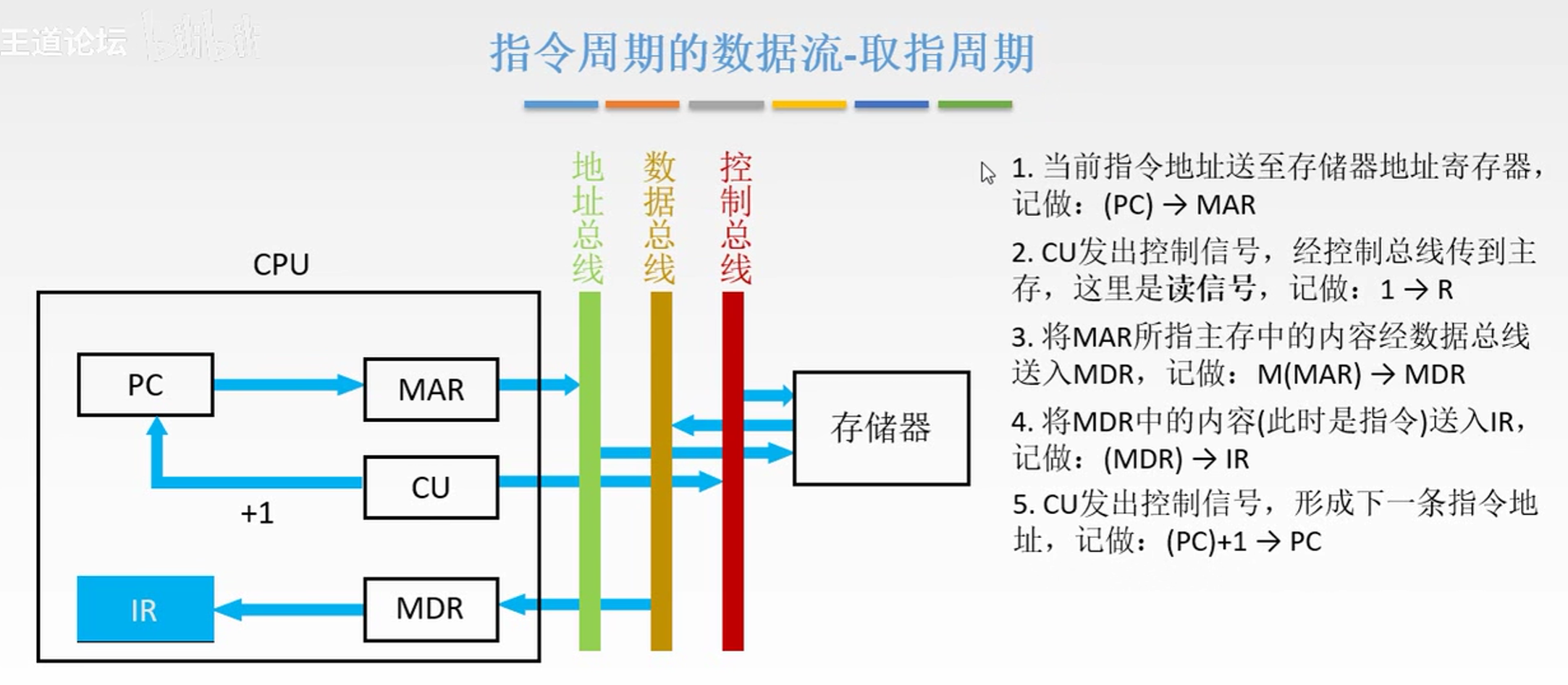
解释:
注意:PC是在取指周期最后进行+1
在以微程序设计的CU中:
同时一般我们说的 微操作(命令) 其实就是 如:
(1)(PC)-> MAR 1->R
(2) M(MAR)-> MDR
(3) (MDR)->IR (PC)+1->PC
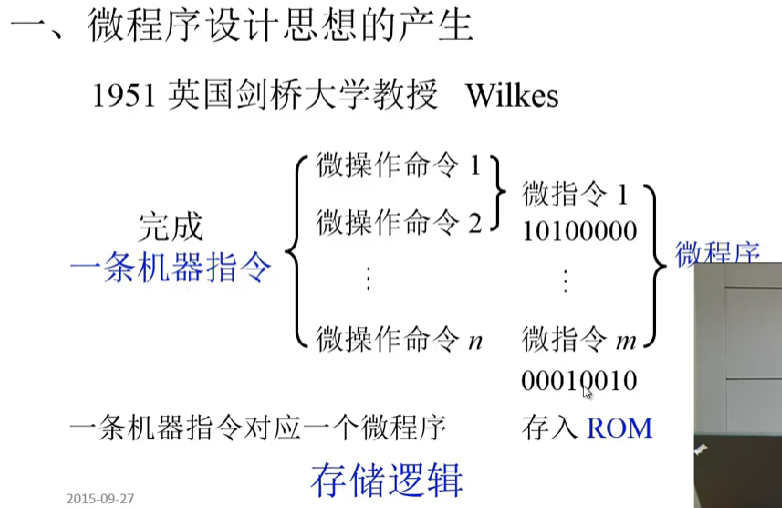
(1),(2),(3)就是微指令了,微指令包含多个微操作
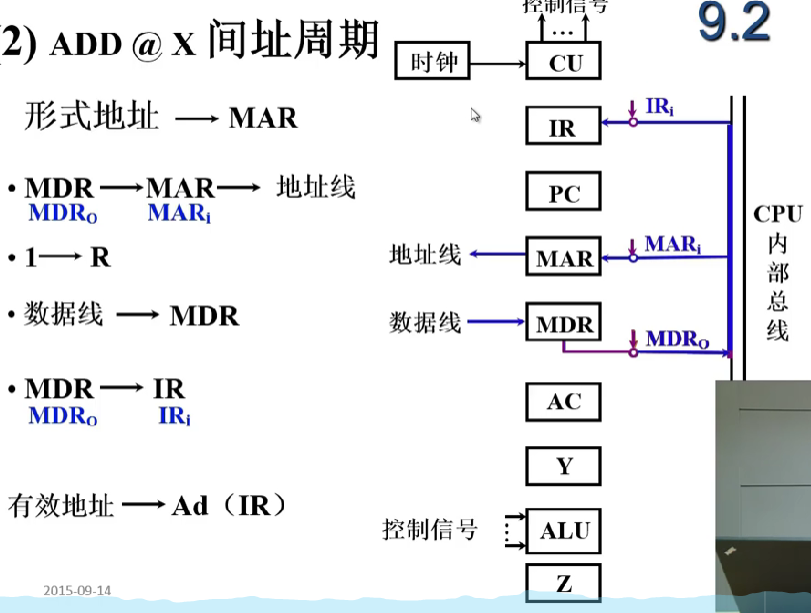
间址周期操作:
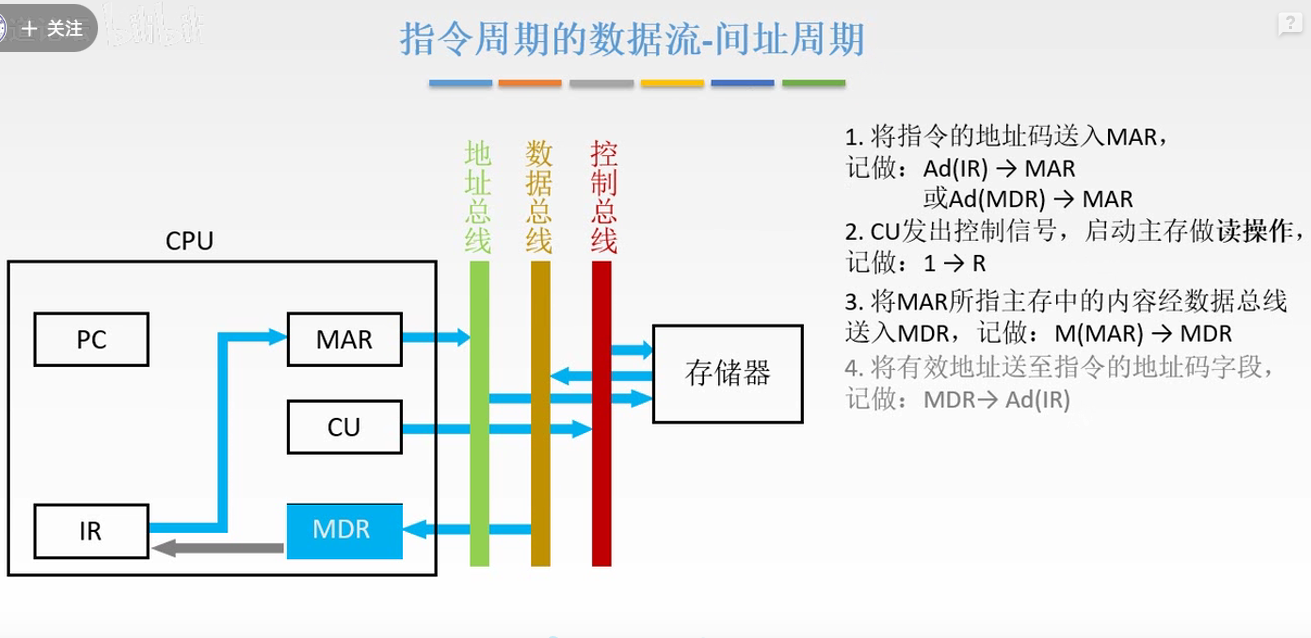
解释:
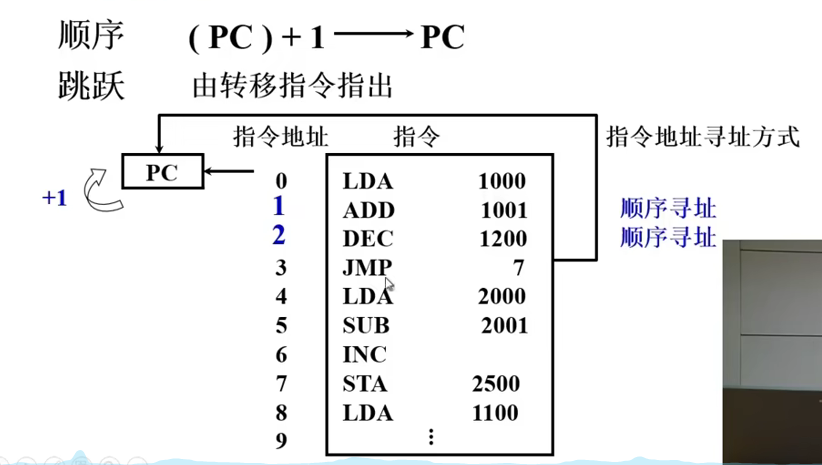
Ad()的含义是:取地址码部分
因为我们知道IR是指令寄存器,IR中保存的是指令
指令包括操作码,操作数(地址码)部分
Ad()就是取指令中的地址码部分
Op()同理,取指令中的操作码部分
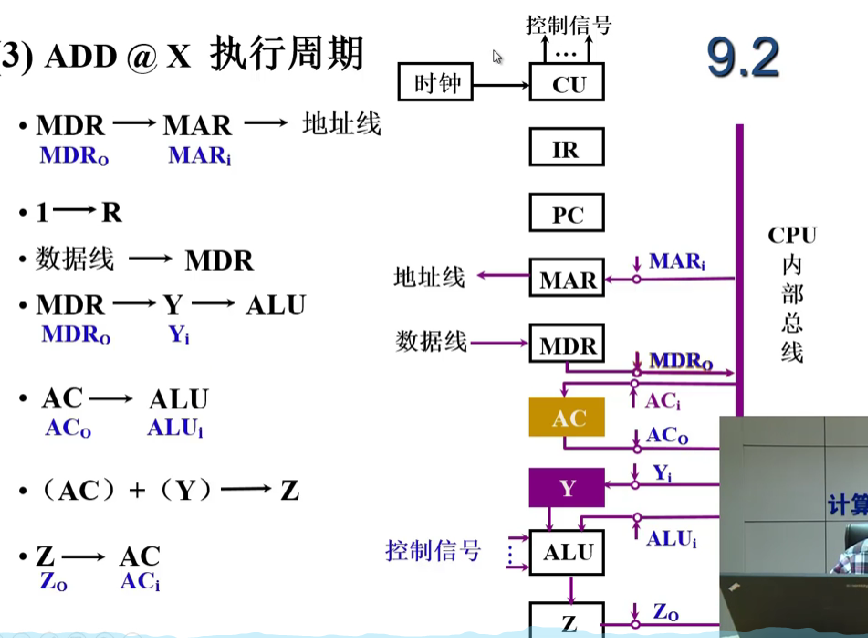
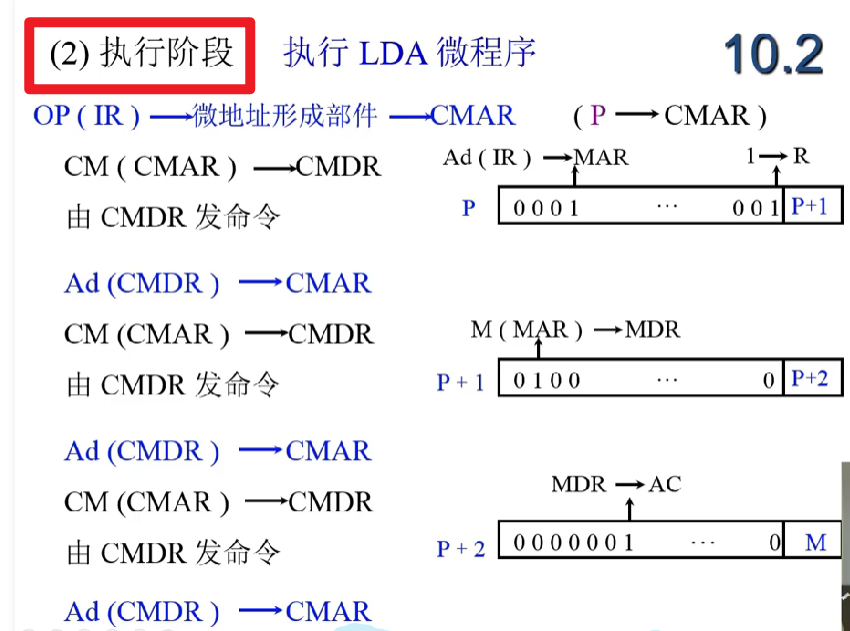
执行周期的操作:
不同指令的执行周期不同
不同的操作指令:
非访存指令:
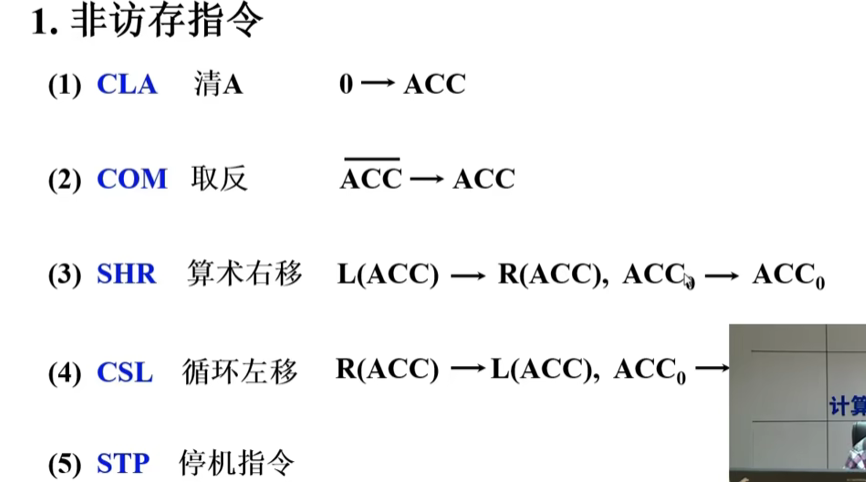

解释:
CLA 清除ACC中的数据的指令
COM是对ACC中的数据每一位取反(二进制下)
访存指令:
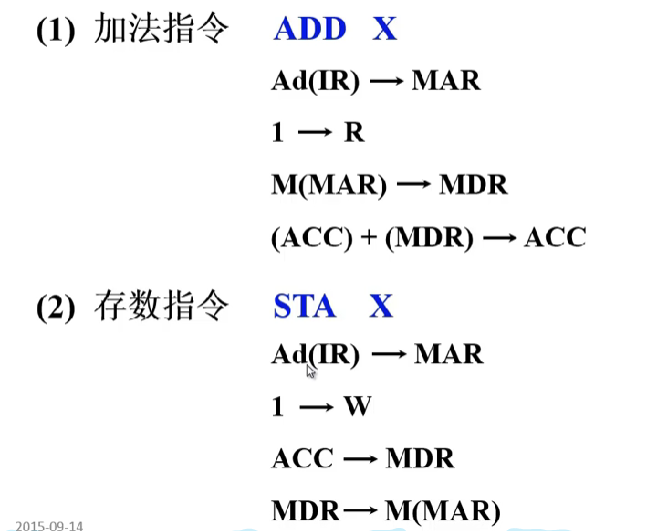

解释:
加法指令其表示要将指令中地址码中受指向的数据与ACC中的数相加
为了取得地址码中受指向的数据,则要进行访存
存数指令即将数X保存到指定存储器中
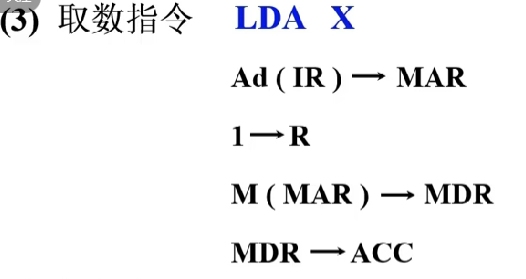
取数指令即将数据取得保存到ACC中
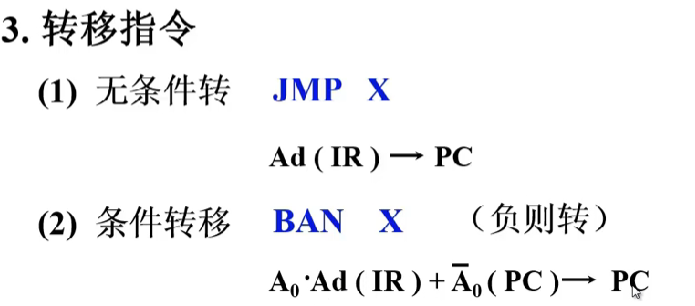
转移指令:
中断周期的操作
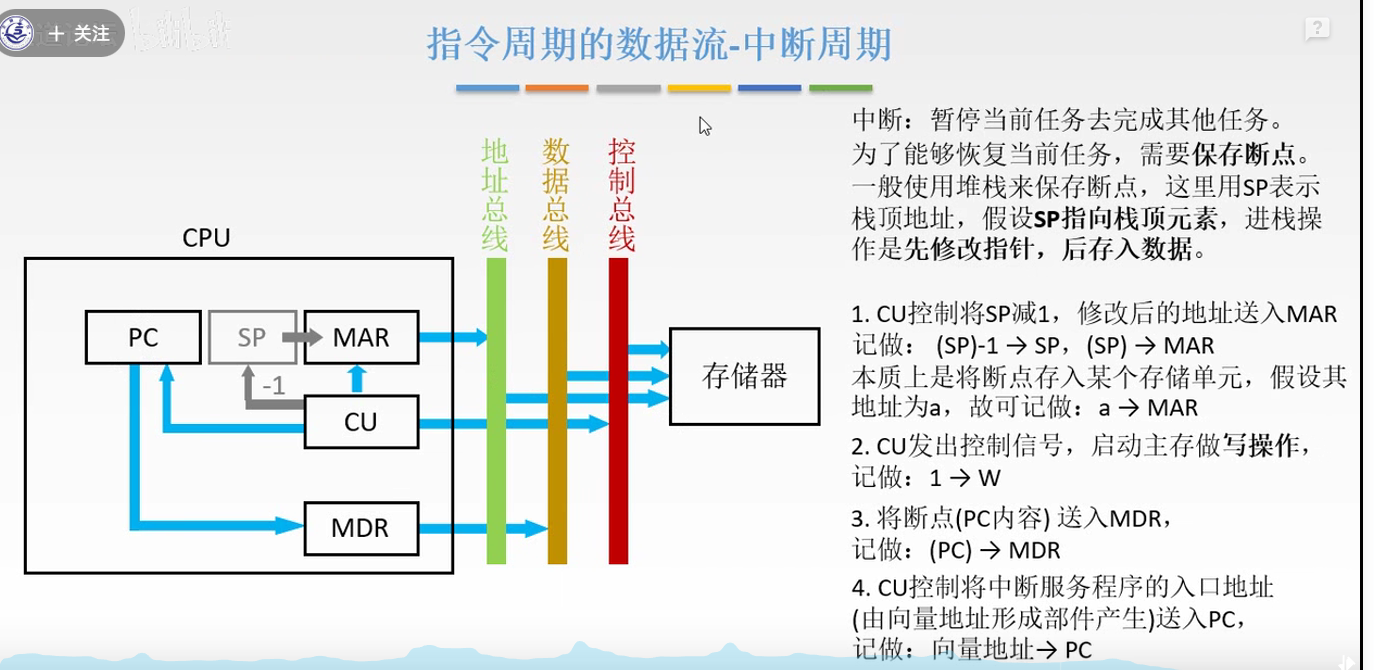
解释:
中断周期操作包括三部分:
1.保存断点
即保存PC中的数据到主存中,PC中的数据是原来下一次执行指令的地址
CU给出要保存到主存中的地址
2.形成中断服务程序的入口地址
由CU给出,用来指明下一次执行的指令是什么
3.硬件关中断
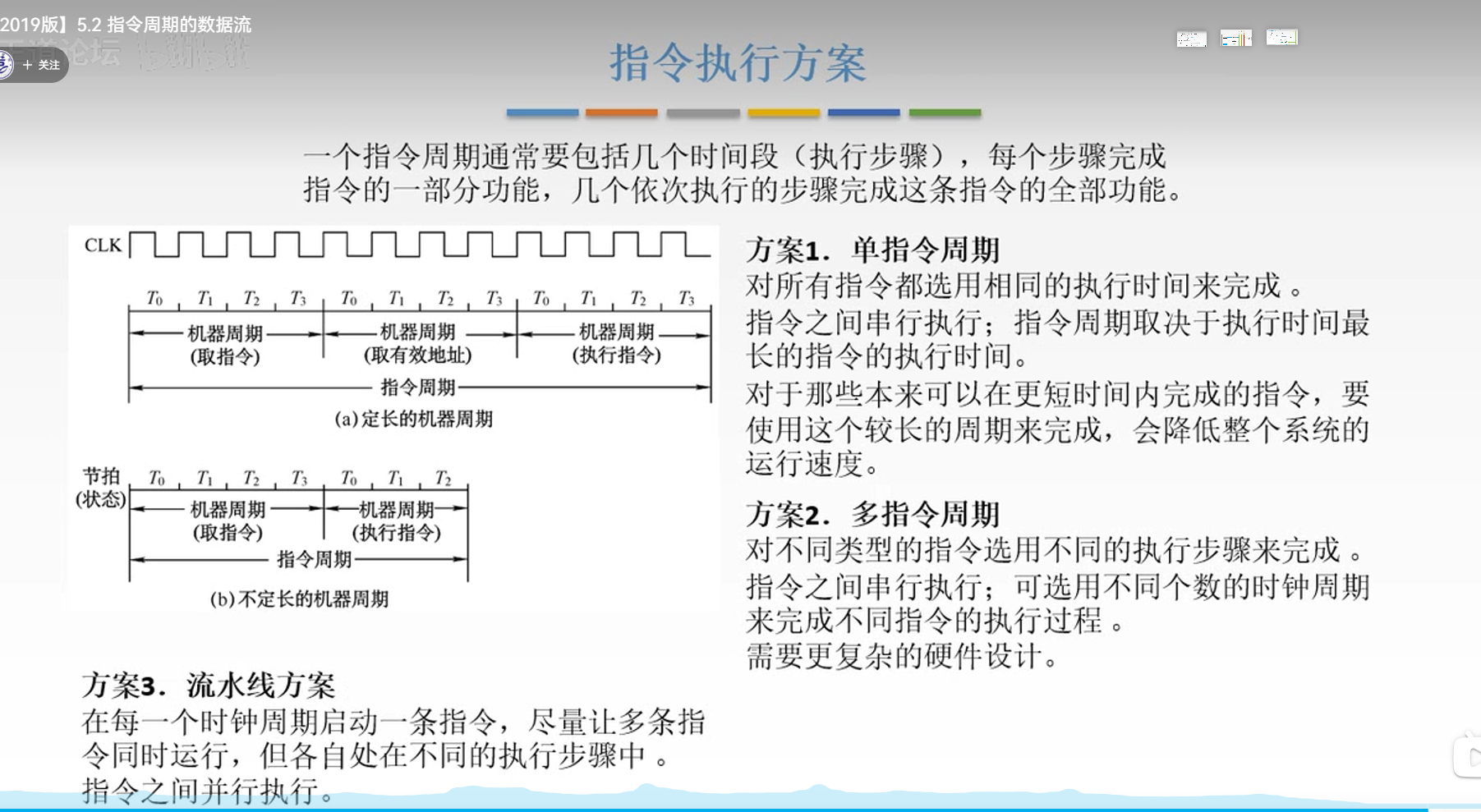
指令执行方案
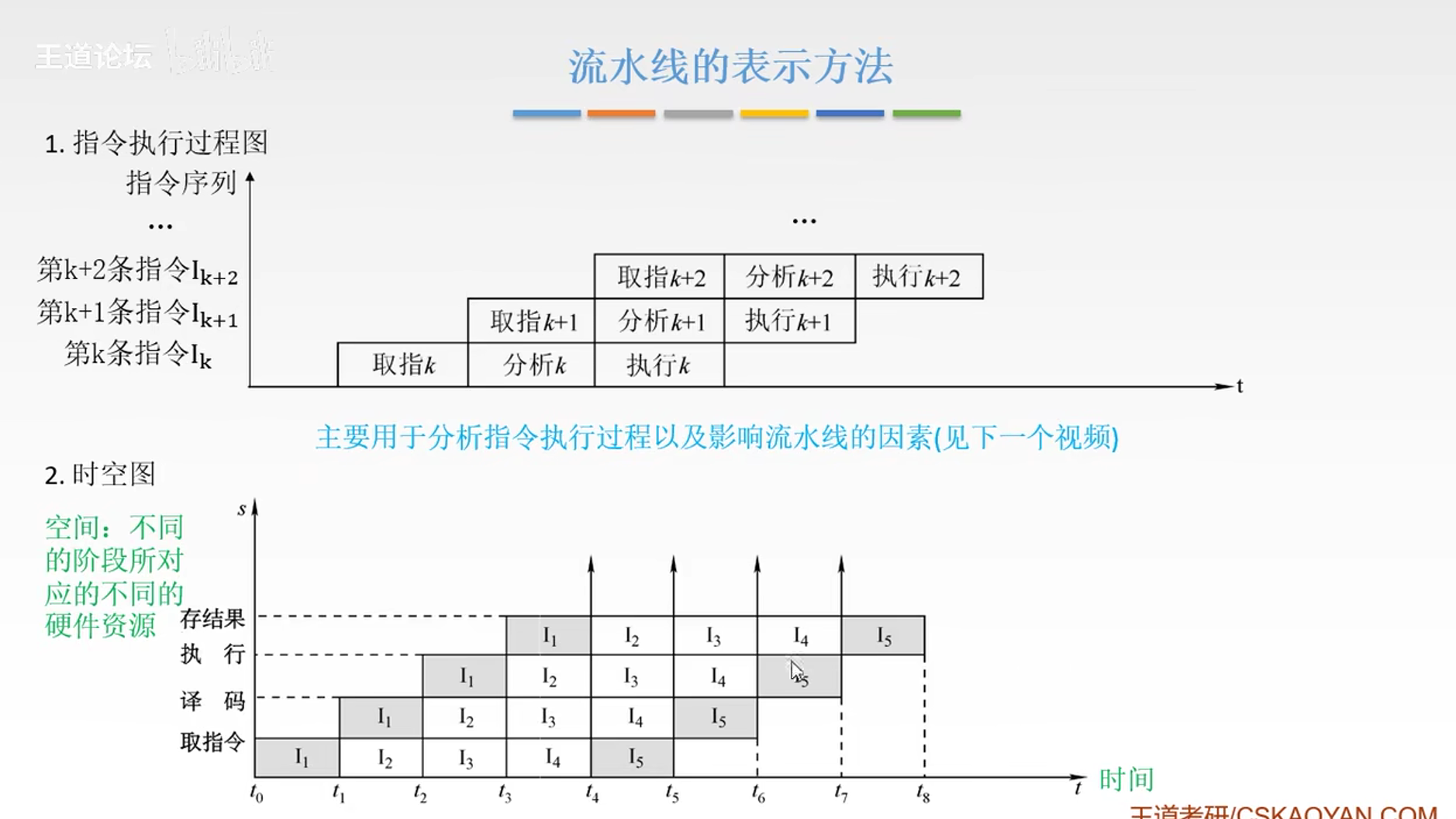
指令流水线:
吞吐率:
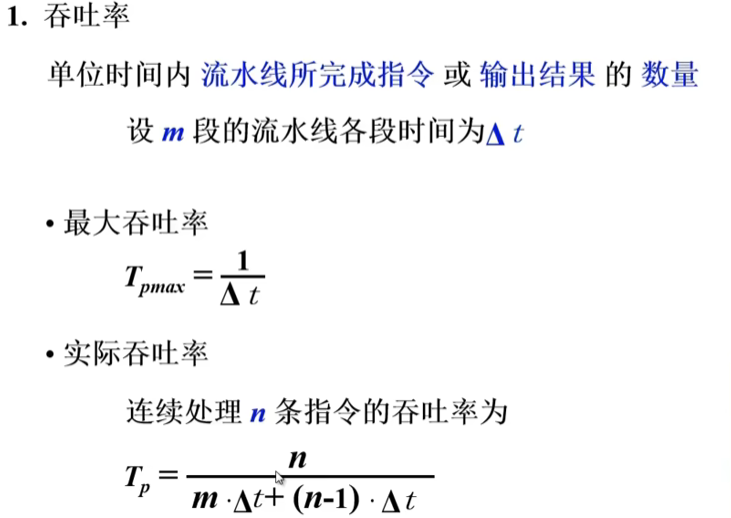
解释:
我们这里是假设满负载运作,每 就会出一个结果
就会出一个结果
在结合这张图来看
实际吞吐率是开始需要 ,然后每经过就会出一个结果
,然后每经过就会出一个结果
所以结果为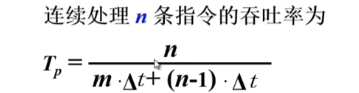
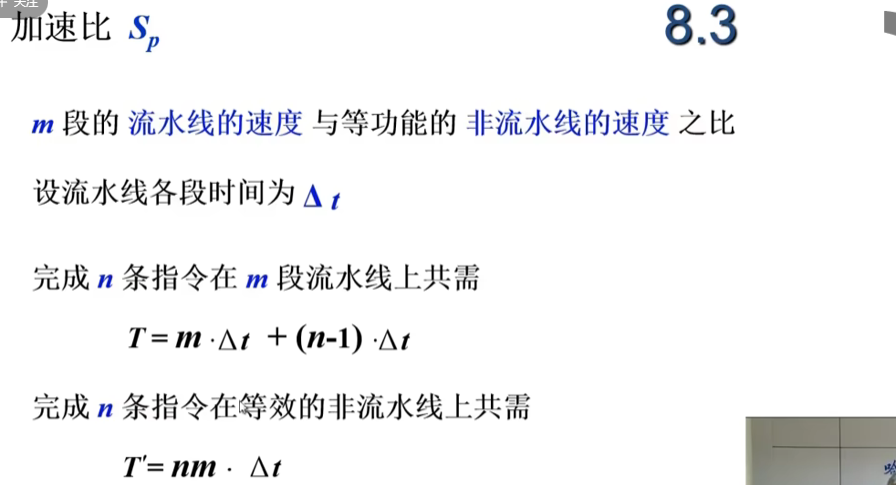
加速比:
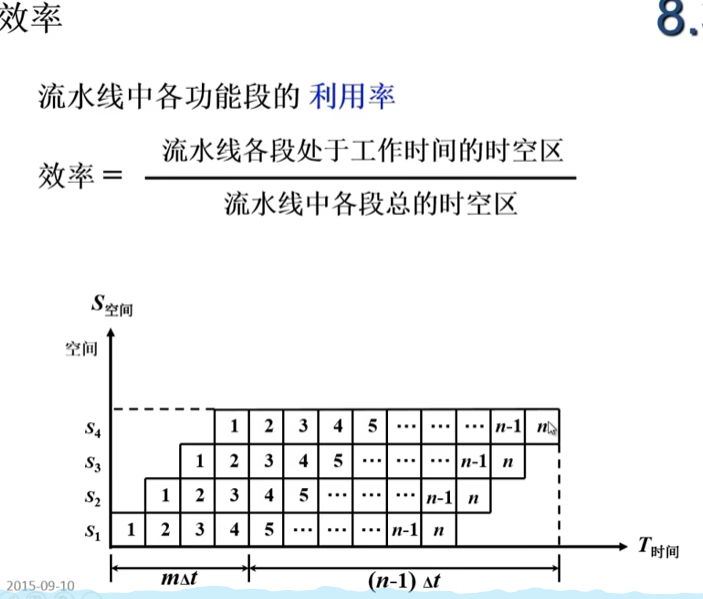
效率:
控制器的设计方案
概念梳理:
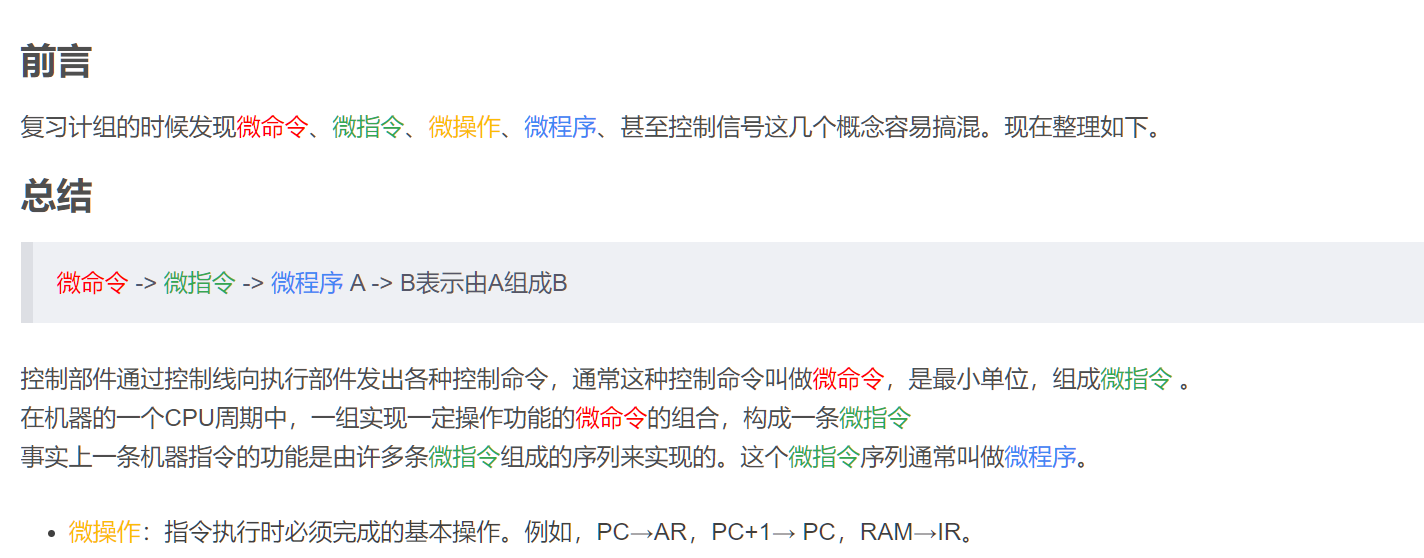
解释:
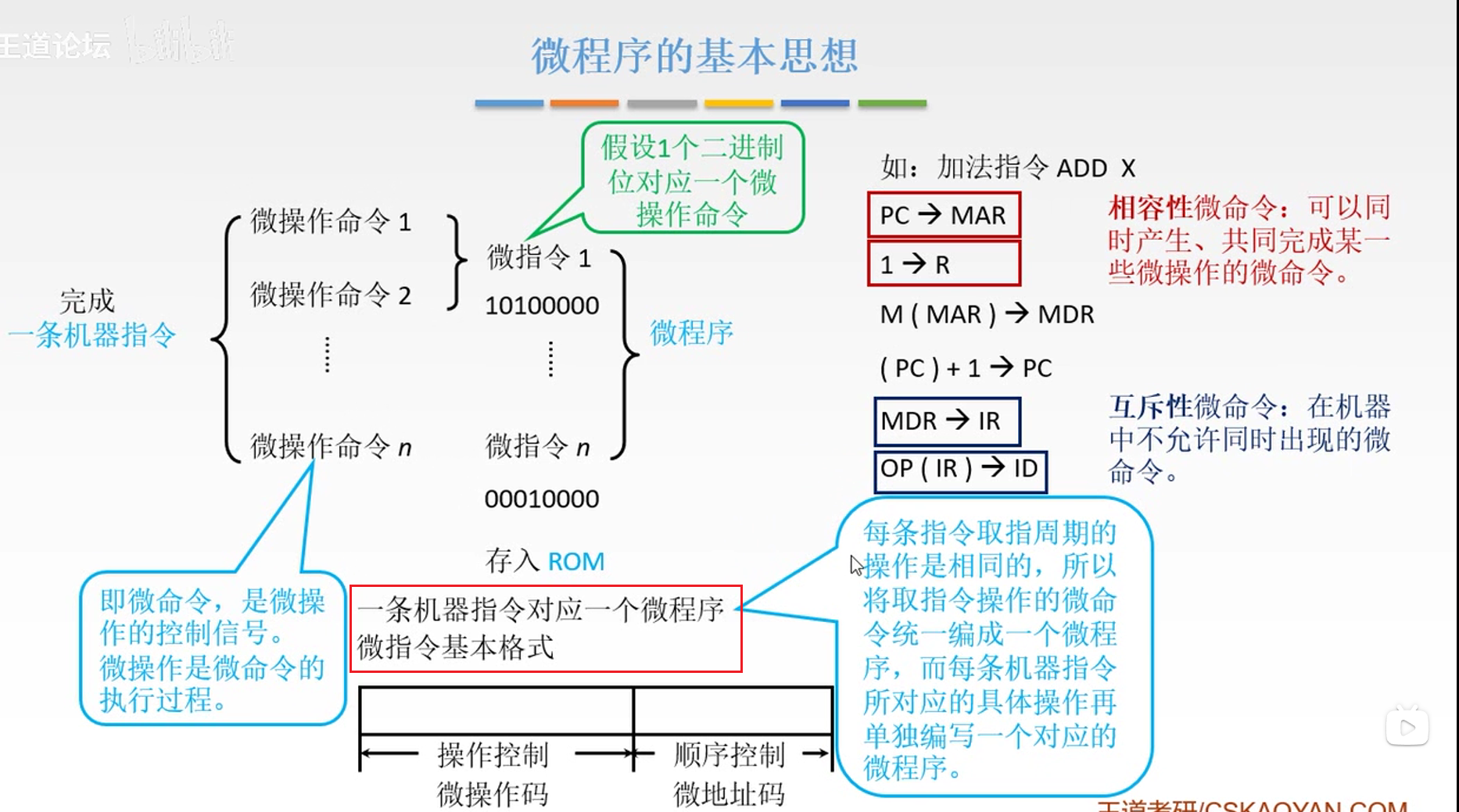
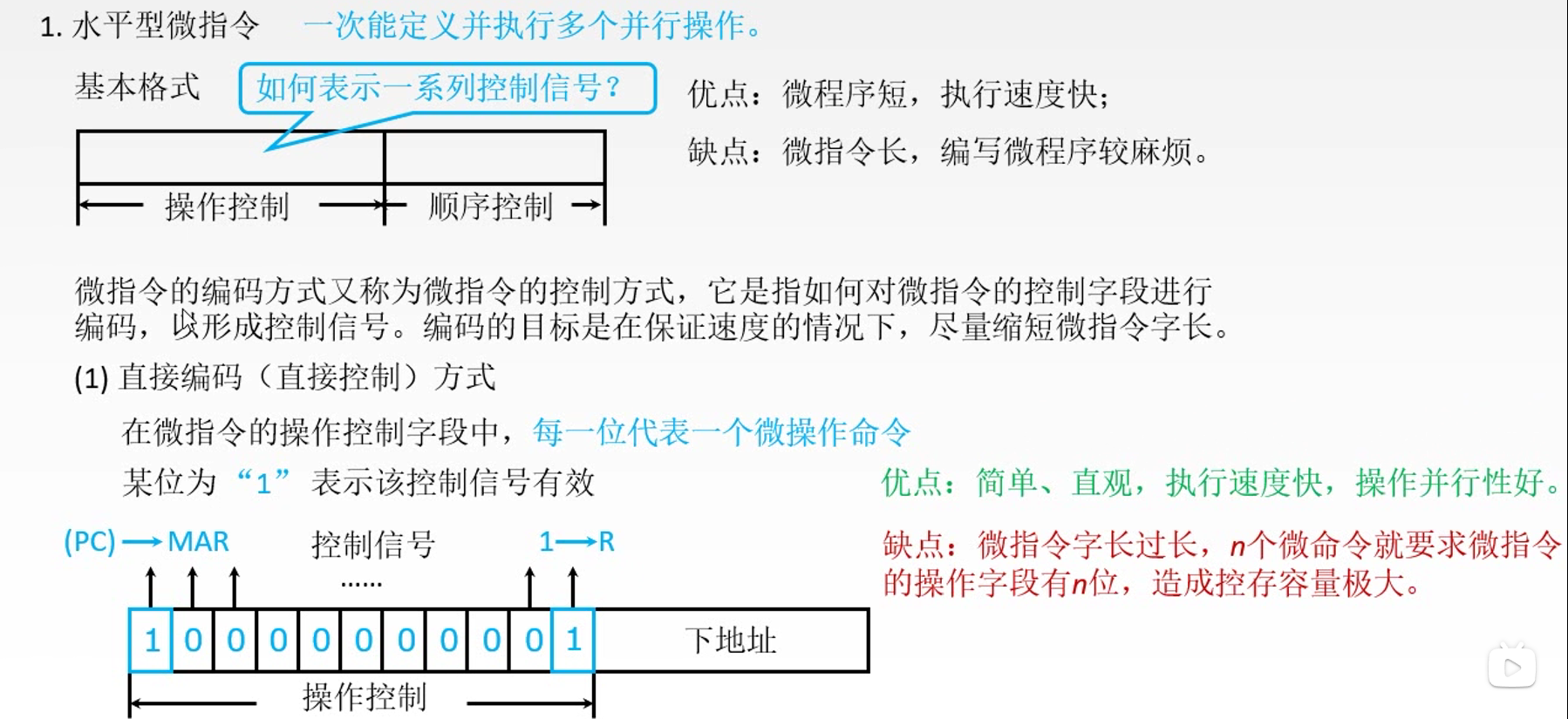
微指令上的1/0,代表某一个微操作是否需要执行,1表示执行,0表示不执行
《控制存储器的构造》
解释:
 如图为取指周期的微指令((1),(2),(3))
如图为取指周期的微指令((1),(2),(3))
每一个微指令中都包含了一个或多个微操作(命令)
通过微指令中的01表示出来
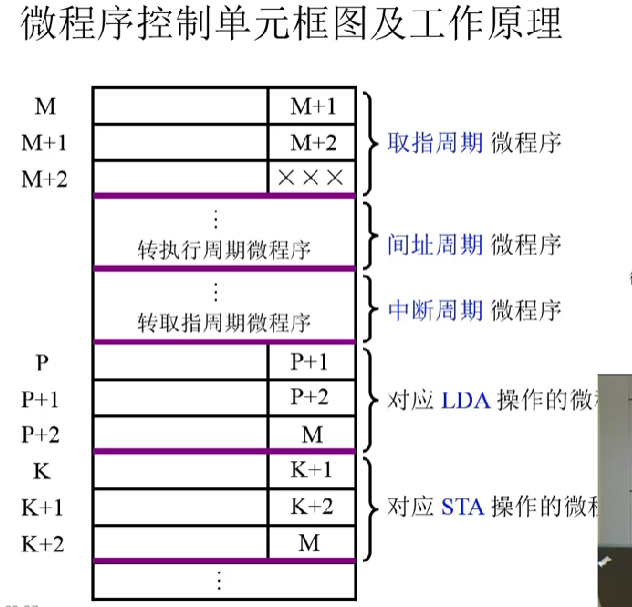
解释:
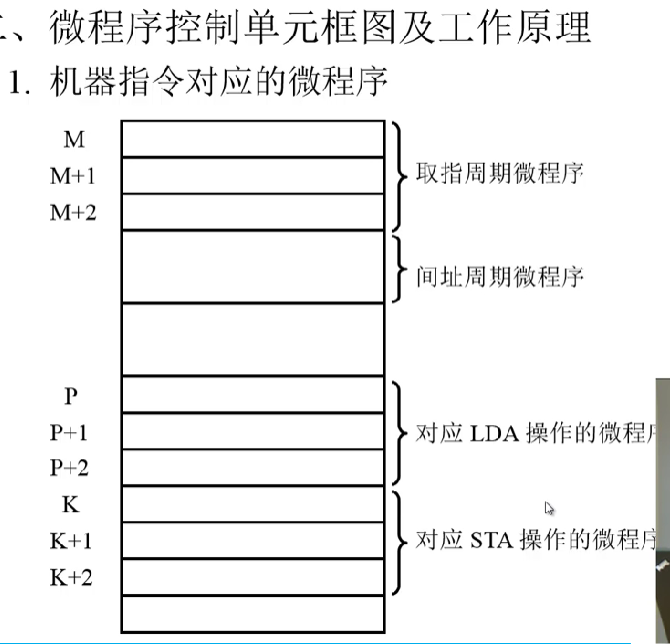
因为某个周期要做的事有些是固定的,则取完一条微指令后
可以通过顺序取下一条微指令
如取指周期
为了取指
第1条微指令要干的微操作就是(PC)->MAR,1->R
紧接其后的第2条就是要M(MAR)->MDR
.....
所以可以看到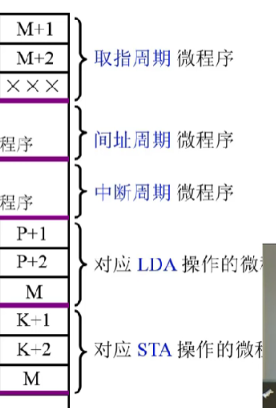
这里的xxx,表示无法确定下一条微指令是啥
比如这里取指周期最后一条微指令的下地址为xxx
因为要执行下一条微指令是要根据指令的操作码部分来决定的
同时,执行周期要干的事,如这里的LDA操作
其最后一条微指令的下地址为M,即干完后接着取下一条指令(再进入取指周期)
《控制单元的构造》
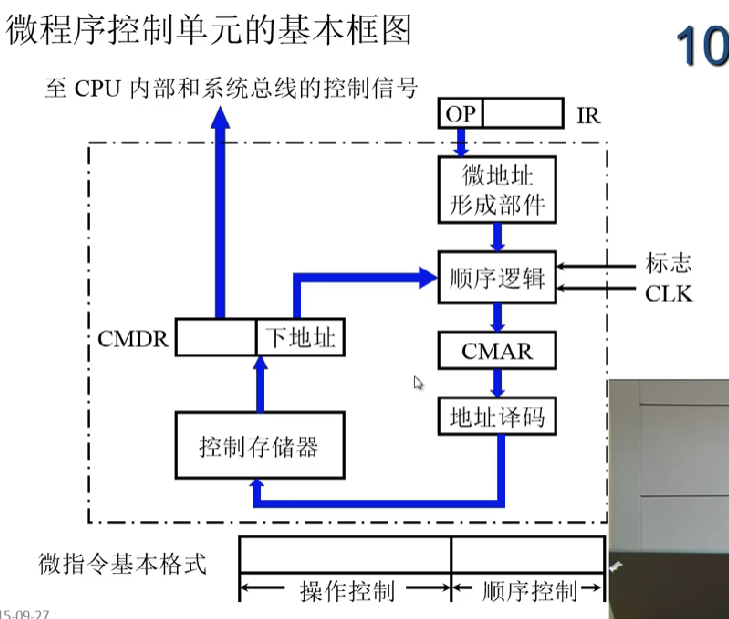
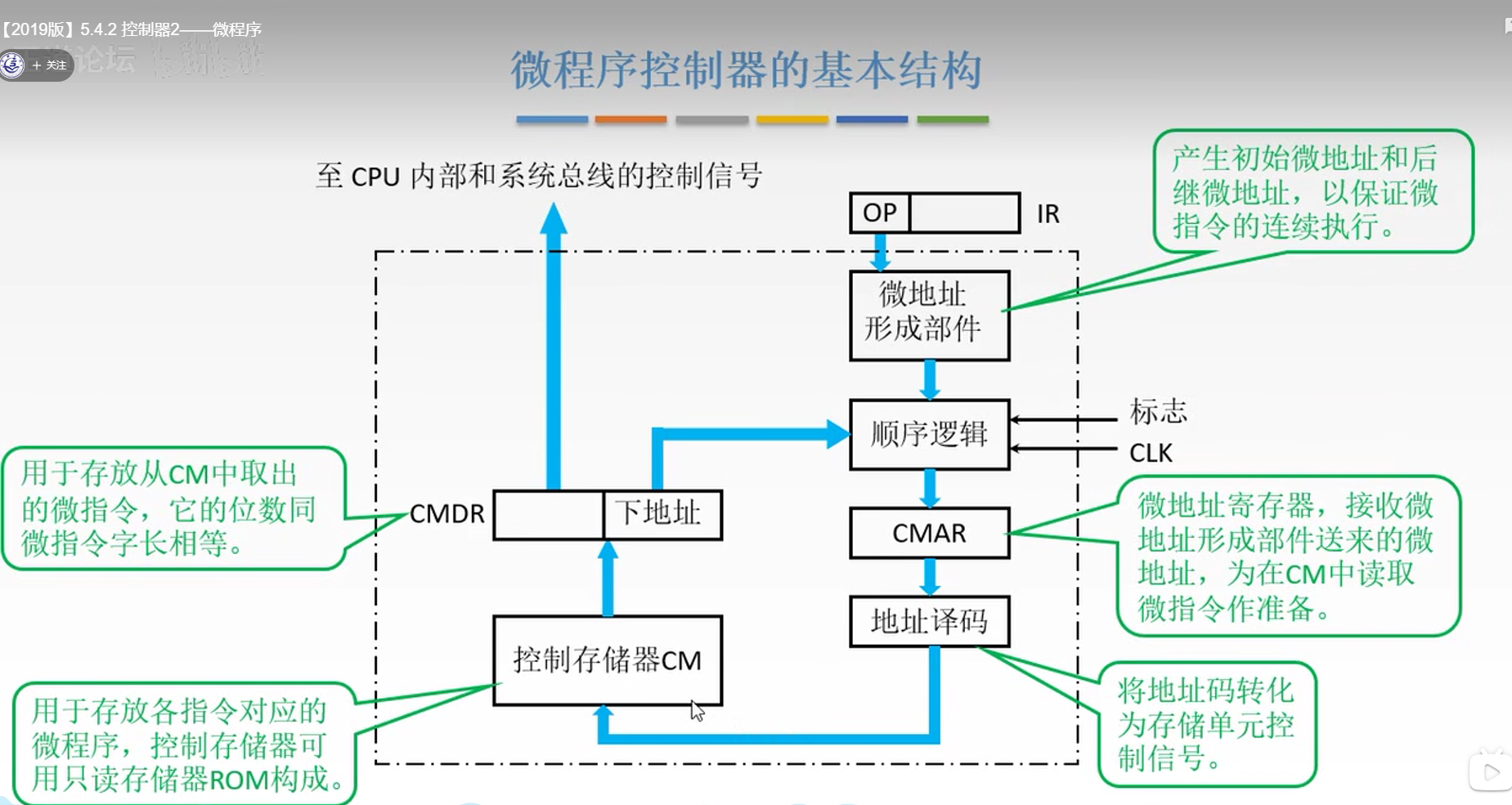
解释:
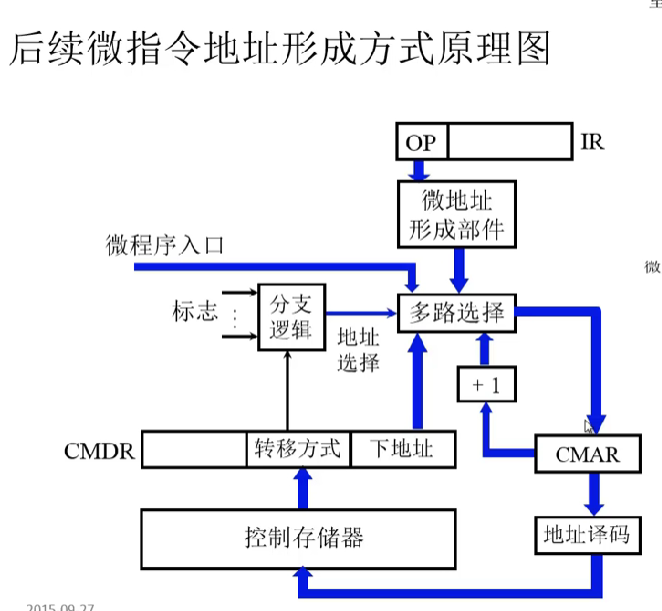
CMAR为控制存储器地址寄存器
CMDR为控制存储器数据寄存器
微指令基本格式中
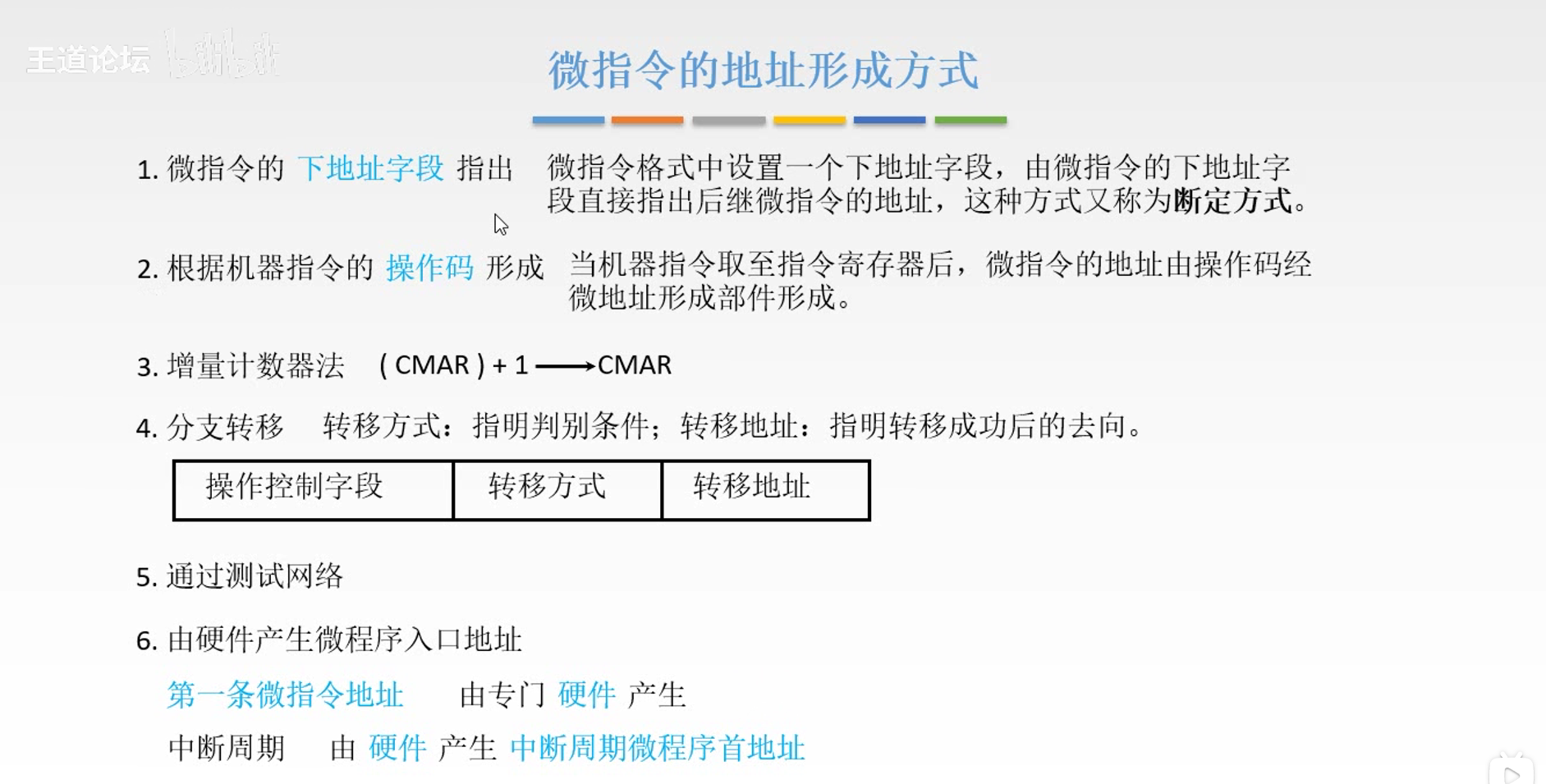
顺序控制给出了下一条微指令在控制存储器中的地址
顺序逻辑用来决定最终下一条微指令在控制存储器中的地址
微地址形成部件是通过指令操作码来产生初始微指令地址
控制单元的工作过程
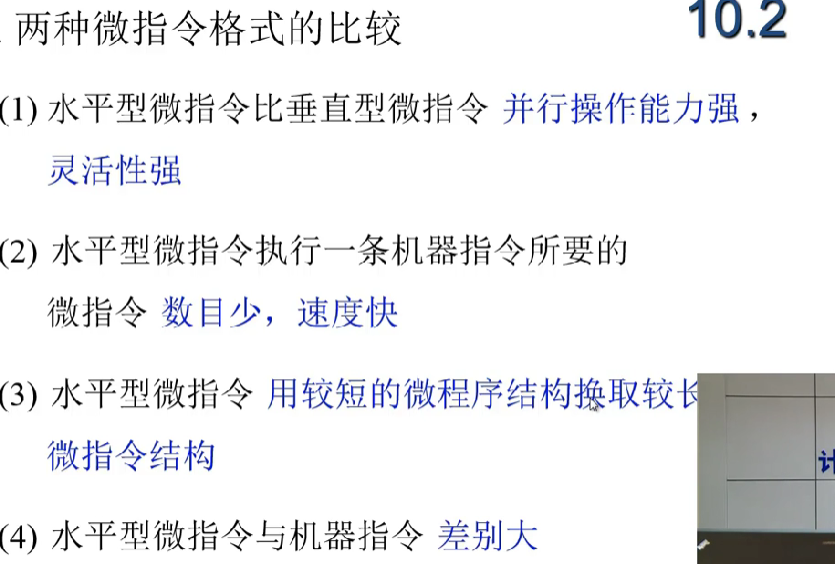
《微指令的格式》
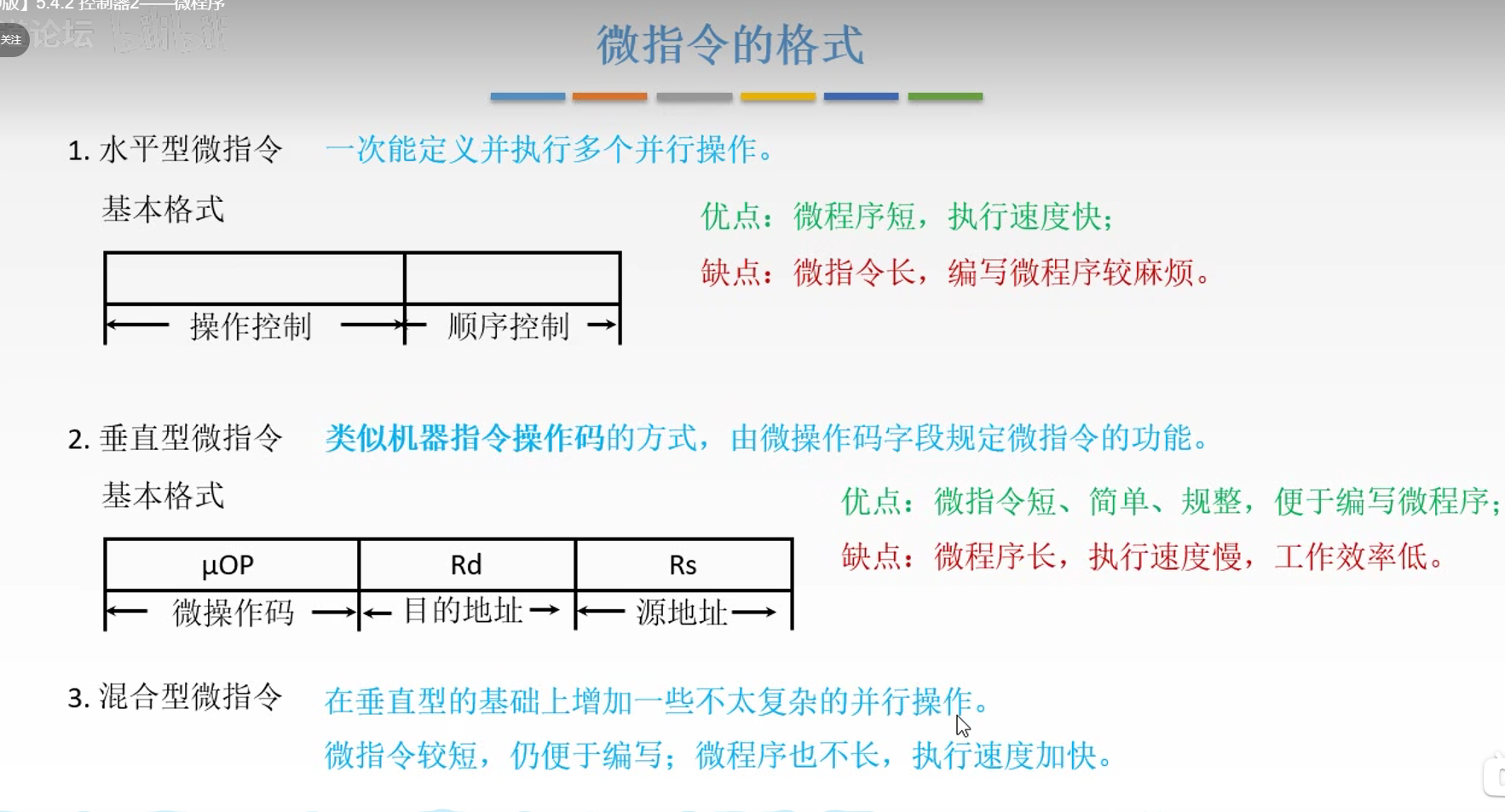
解释:
水平型微指令其编码方式是通过二进制下某一位为0/1来决定是否执行某一个微操作
所以水平型微指令会较长一点
但是其能够并行完成微操作,所以微程序会更短一点
垂直型微指令其编码方式是通过n位二进制位有2^n种状态,每一个状态来决定一个微操作
所以垂直型微指令会较短一点
但是其不能并行执行微操作,所以其微程序会更长一点
《水平微指令的编码》
《直接编码》
《字段直接编码》
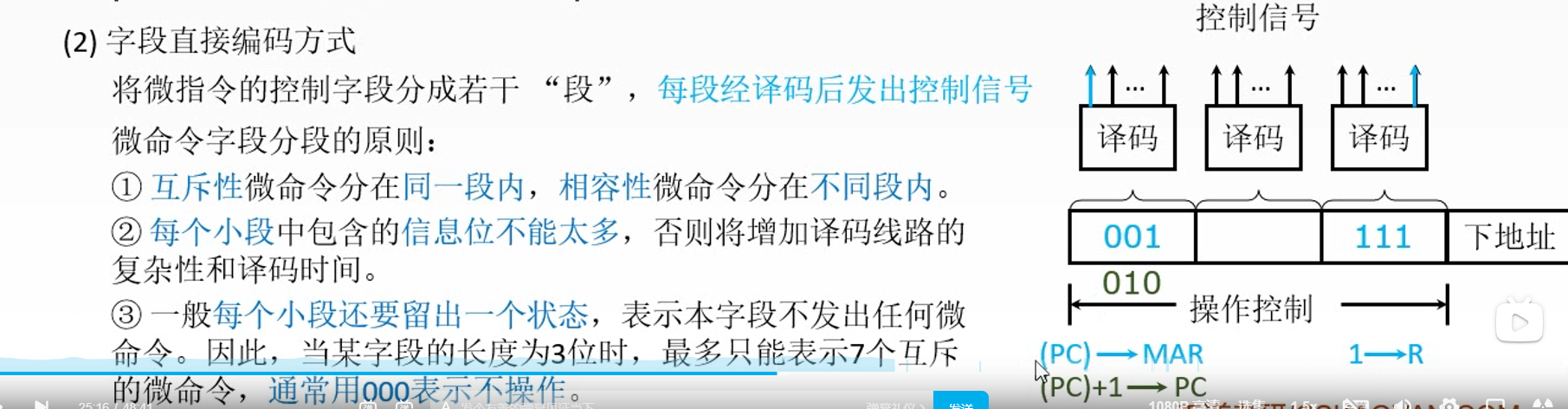
互斥性微命令分在同一段内,相容性微命令分在不同段内,
这是因为通过译码每一次只有一个微命令可以执行,
如果将互斥微命令分在不同一段内则可能会导致微命令的互斥,
也会导致本来可以同时进行的微命令而不会同时进行
这个设计思想的核心是以如n位二进制可以表达2^n的状态,则这一点可以用来表示2^n的微命令
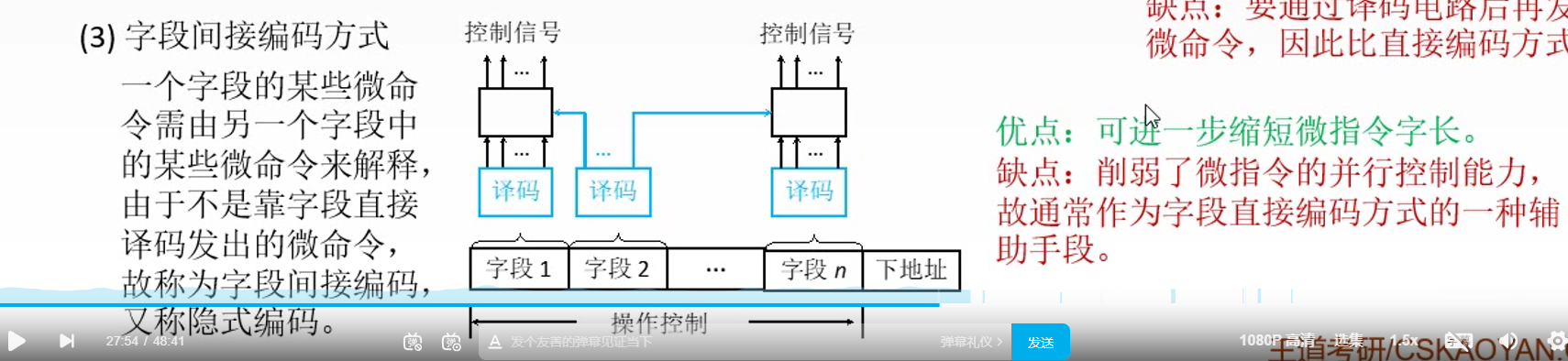
《字段间接编码方式》
《微指令的地址形成方式》
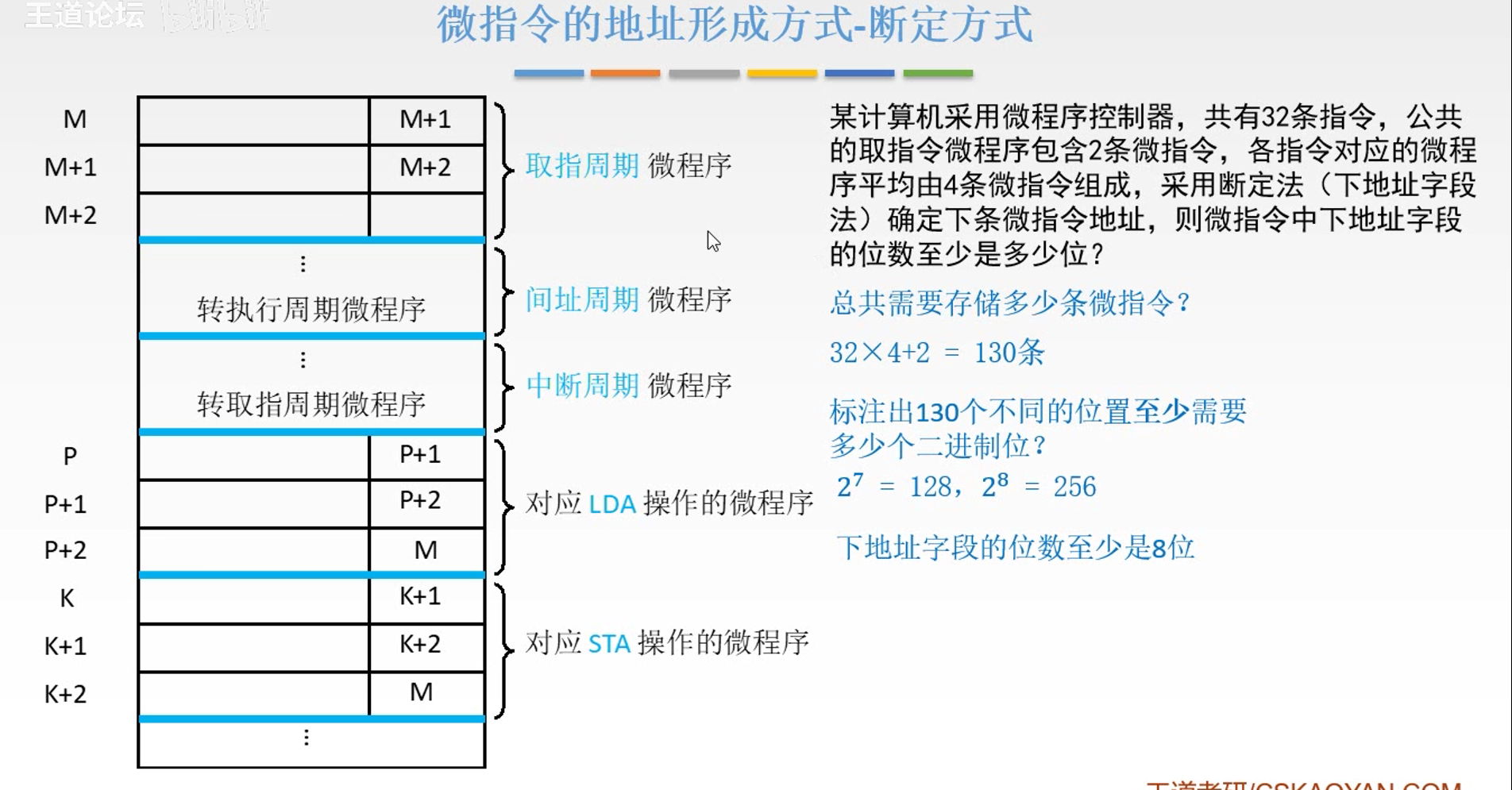
写题记录:

解:
对于第4问很容易答成:通过CU来识别主存储器
这里要说明具体是如何识别的


 浙公网安备 33010602011771号
浙公网安备 33010602011771号