

stm32使用SPI外设读取W25Q32芯片
void SPI_GPIO_Init(void) { //SPI2-NSS PB12:PIN25 --CS //SPI2-SCK PB13:PIN26 //SPI2-MISO PB14:PIN27 W25Q32:DO //SPI2-MOSI PB15:PIN28 W25Q32:DI GPIO_InitTypeDef GPIO_InitStruct; SPI_InitTypeDef SPI_InitStruct; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);//时钟也无需开启AFIO时钟 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStruct); GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_12; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStruct); SPI_CS_H; // GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; // GPIO_InitStruct.GPIO_Pin = GPIO_Pin_14; // // GPIO_Init(GPIOB, &GPIO_InitStruct); SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge; SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low; SPI_InitStruct.SPI_CRCPolynomial = 7; SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b; SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB; SPI_InitStruct.SPI_Mode = SPI_Mode_Master; SPI_InitStruct.SPI_NSS = SPI_NSS_Soft; SPI_Init(SPI2, &SPI_InitStruct); SPI_Cmd(SPI2, ENABLE); }
使用SPI标准接口SPI-NSS引脚对应芯片的CS引脚;
使用SPI标准接口SPI-SCK引脚对应芯片的CLK引脚;
使用SPI标准接口SPI-MISO引脚对应芯片的DO引脚;
使用SPI标准接口SPI-MOSI引脚对应芯片的DI引脚;
注意SPI-NSS引脚IO口配置为普通推挽输出,SPI-MISO配置为复用推挽输出,而不是配置为输入
int main(void) { SPI_GPIO_Init(); SPI_CS_L; // while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI2, 0xAB); while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET); val[0] = SPI_I2S_ReceiveData(SPI2); // while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI2, 0xAB); while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET); val[0] = SPI_I2S_ReceiveData(SPI2); // while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI2, 0xAB); while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET); val[0] = SPI_I2S_ReceiveData(SPI2); // while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI2, 0xAB); while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET); val[0] = SPI_I2S_ReceiveData(SPI2); // while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET); SPI_I2S_SendData(SPI2, 0xAB); while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET); val[0] = SPI_I2S_ReceiveData(SPI2); SPI_CS_H; while(1); }
主函数中,主机发送一个数据时,要等待发送数据寄存器为空,才算把数据发送到从机;主机接收数据寄存器不为空时,才可以读取主机收到的数据。
若是主机发送一个数据,判断发送数据寄存器为空时就认为从机数据已经发送到主机,在主机读取数据,这个数据是错误的。
SPI_I2S_SendData(SPI2, 0xAB);
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET);
val[0] = SPI_I2S_ReceiveData(SPI2);
这样判断,主机读取的数据是错误的,需要注意。
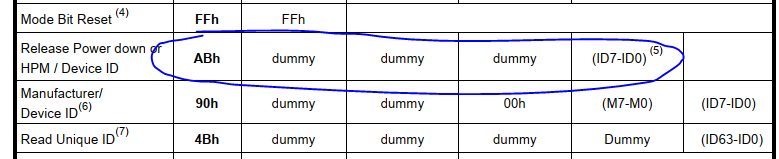
读取ID7-ID0数据时,需要注意前面发送了4个数据,分别为ABh,any, any, any,之后若要读取数据,需要额外再发送一个数据给从机,才能将从机的数据移位到主机接收数据寄存器中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号