

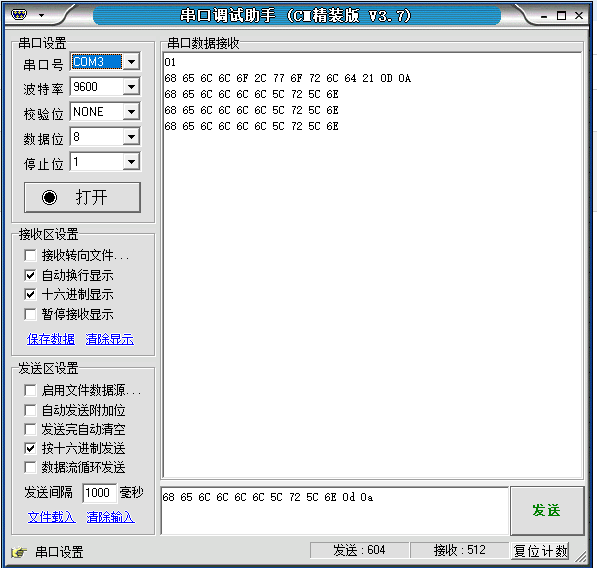
STM32F103C8T6串口通信-将上位机发给MCU的数据发回给上位机
#ifndef __USART_H__ #define __USART_H__ #include "stm32f10x.h" #include <stdio.h>//重定向的函数要用 #define USART1_SEND_BYTE_NUM 512//定义发送字节数 extern uint16_t USART1_RX_STATE; extern uint16_t USART1_SEND_BYTE[]; void USART1_GPIO_Init(void); int fputc(int ch, FILE *f); #endif
usart.h
#include "usart.h" uint16_t USART1_RX_STATE = 0;//定义标志位 uint16_t USART1_SEND_BYTE[USART1_SEND_BYTE_NUM]; void USART1_GPIO_Init(void) { //1.指定并配置GPIO端口 //2.配置串口1 //3.使能端口时钟,具体的复用功能时钟 //4.使能串口1 GPIO_InitTypeDef GPIO_InitStruct; USART_InitTypeDef USART_InitStruct; //PA9 复用功能USART1 TX---需要配置为复用推挽输出--具体模式说在参考手册GPIO章节能查询到,我并未查到 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; //使能时钟-端口时钟,复用功能时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE); GPIO_Init(GPIOA, &GPIO_InitStruct); //PA10 复用功能USART1 RX---需要配置为浮空输入 --具体模式说在参考手册GPIO章节能查询到,我并未查到 GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; // GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10; GPIO_Init(GPIOA, &GPIO_InitStruct); //配置USART1 USART_InitStruct.USART_BaudRate = 9600;//常用波特率值 USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; USART_InitStruct.USART_WordLength = USART_WordLength_8b; USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStruct.USART_Parity = USART_Parity_No; USART_InitStruct.USART_StopBits = USART_StopBits_1; USART_Init(USART1, &USART_InitStruct); //使能串口1 USART_Cmd(USART1, ENABLE); //串口中断设置 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//配置接收非空产生中断 } //实现串口打印功能需要调用printf函数,需要重定向fputc函数 int fputc(int ch, FILE *f) { while(USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET); USART_SendData(USART1, (unsigned char)ch);//该函数本来是把要打印的字符串ch输出到数据流中;被串口从中拿到数据ch的拷贝,并发通过USART_SendData发送到数据输出寄存器USART_DR // while(USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);//数据发送到USART_DR时,USART_FLAG_TC会标志位置高;USART_GetITStatus函数一般是用在中断里确认是哪种中断 //因为这句放下面会经常出现缺少一个字符,所以移动到上面了,不知道啥原因 return ch; //数据继续发送到数据流中 } //void USART1_Send(uint16_t msg) //{ // //}
usart.c
#ifndef __NVIC_H__ #define __NVIC_H__ #include "stm32f10x.h" void NVIC_GPIO_Init(void); #endif
nvic.h
#include"nvic.h" void NVIC_GPIO_Init(void) { NVIC_InitTypeDef NVIC_InitStruct; NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 2; NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_Init(&NVIC_InitStruct); }
nvic.c
#include "stm32f10x_it.h" #include "usart.h" extern uint16_t USART1_RX_STATE; extern uint16_t USART1_SEND_BYTE[]; void USART1_IRQHandler(void) { uint8_t res = 0; //进入该中断,说明数据接收寄存器RDR接收到数据 if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)// 更像是确认是否是接收非空中断; 接收数据寄存器RDR接收到数据时 { res = USART_ReceiveData(USART1); if((USART1_RX_STATE & 0x8000) == 0) //如果最高位为0,说明没有接收完成 { if(USART1_RX_STATE&0x4000)//次高位为1情况下 { if(res == 0x0a) //次高位为1情况下,如果收到0x0a,需要最高位标志位置1 { USART1_RX_STATE |= 0x8000; } else //次高位已经收到0X0D,最后一个字节却不是0X0A,数据都不要了 { USART1_RX_STATE = 0;//次高位已经收到0X0D,最后一个字节却不是0X0A,数据都不要了 } } else//次高位并没有置1,没有收到0x0d { if(res == 0x0d) //如果这一个数据正好是0x0d,则次高位置1 { USART1_RX_STATE |= 0x4000; } else //这个数据并不是0X0D,则是USART1_RX_STATE&0x3fff之前的接收序号数据 { USART1_SEND_BYTE[USART1_RX_STATE&0x3fff] = res; USART1_RX_STATE ++; if(USART1_RX_STATE > USART1_SEND_BYTE_NUM-1) { USART1_RX_STATE = 0; } } } } // else // { // // // } } }
stm32f10x_it.c
USART_GetITStatus一般用在中断里作为判断使用,和USART_GetFlagStatus要区分
#include "stm32f10x.h" #include "usart.h" #include "nvic.h" //mcu transmit data to PC repeatedly ,while PC transmit data to MCU,then MCU will transmit the data what the PC transmit; //MCU重复不断给PC发数据,当PC给MCU发数据时,MCU会把收到的信息发回给PC int main(void) { uint8_t t,len; NVIC_GPIO_Init(); USART1_GPIO_Init(); printf("hello,world!\r\n"); while(1) { if(USART1_RX_STATE&0x8000) { len = USART1_RX_STATE&0x3fff; for(t = 0; t < len; t++) { USART_SendData(USART1, USART1_SEND_BYTE[t]); while(USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET); } USART1_RX_STATE = 0; } } }
main.c

 浙公网安备 33010602011771号
浙公网安备 33010602011771号