目标跟踪算法KCF阅读记录(二)
是离散傅里叶变换
的系数矩阵,
是
向量,
假如令 = {1 2 3 4 5},那么:


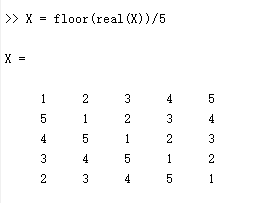
对式子进行逆变换,可以轻易将一个循环矩阵对角化,在此不赘述。
另外需要注意的是,



是离散傅里叶变换
的系数矩阵,
是
向量,
假如令 = {1 2 3 4 5},那么:
对式子进行逆变换,可以轻易将一个循环矩阵对角化,在此不赘述。
另外需要注意的是,

 浙公网安备 33010602011771号
浙公网安备 33010602011771号