【Joint Search-and-Training】2020-IJCAI-Beyond Network Pruning a Joint Search-and-Training Approach-论文阅读
Joint Search-and-Training
2020-IJCAI-Beyond Network Pruning a Joint Search-and-Training Approach
来源:ChenBong 博客园
- Institute:Xidian University
- Author:Xiaotong Lu,Weisheng Dong*
- GitHub:/
- Citation:/
Introduction
提出了一种联合搜索-训练的紧凑网络训练方法,无需使用pre-train model,直接从头开始在backbone网络上搜索-训练紧凑网络。
将backbone网络视为搜索空间,反复搜索、训练不同的子网,将最佳子网取出微调到收敛。
Motivation
传统的剪枝方法:
- 需要训练一个过度参数化的网络(需要预训练模型),作为剪枝对象
- 剪枝后需要继承结构和权重
本方法:
- 把剪枝看做NAS的一个特例
- 在backbone网络上反复搜索,训练不同的子网
Contribution
Method
Pipeline
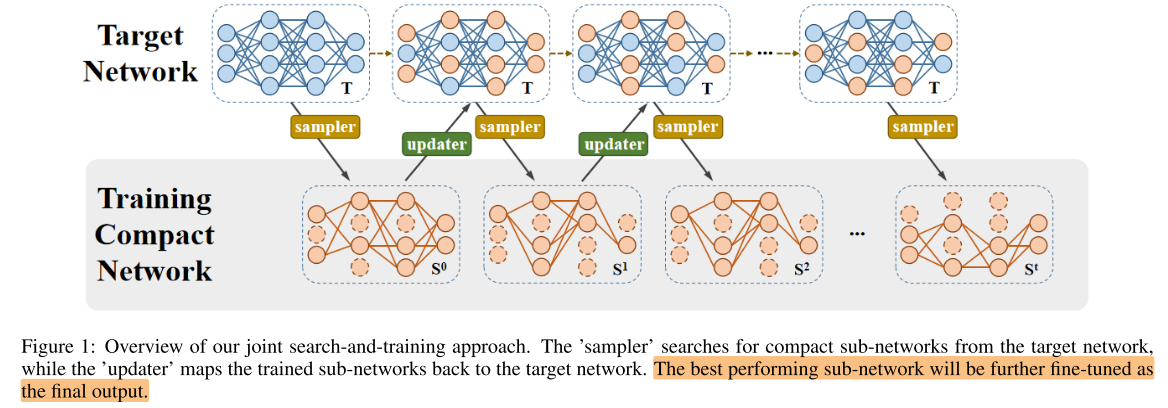
图1说明:
在backbone网络T上反复采样子网络,更新子网络的权重,并将子网络的更新map回backbone网络T中,反复多次后,取出最佳子网络fine-tune到收敛。
Fix pruning rate vs. Our method
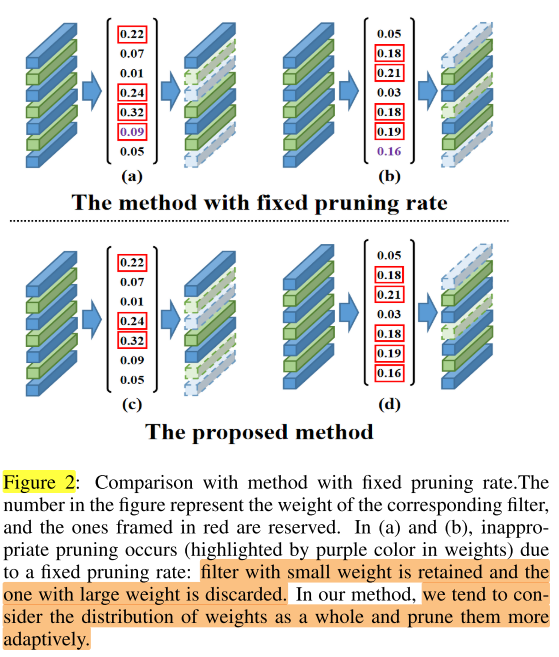
图2说明:
每个filter对应一个 \(\alpha\) ,类似filter的重要性指标,
fix pruning rate是每一层都使用固定的剪枝率,会导致将有的层的某个filter重要性指标较大,但是因为该层未达到指定剪枝率,而把该filter剪掉;
本文的方法类似全局剪枝:
- 全局剪枝是将重要性小于阈值的filter剪掉,而且全局的阈值是统一的;
- 本文的方法是每一层对应一个“阈值”,将每层的卷积核重要性大到小排列,将每个卷积核的重要性从头开始逐一累加,当累加到大于该层的“阈值”时停止,此时保留的卷积核即已经累加的卷积核。
ThresNet-每层阈值的计算
\(\beta=\Phi\left(\alpha\right) \qquad(2)\)
公式(2)说明:
- \(\Phi\) 表示 ThresNet 的参数
- \(\alpha\) 表示 backbone网络的结构参数(weights)
- \(\beta\) 表示 backbone网络的各层阈值
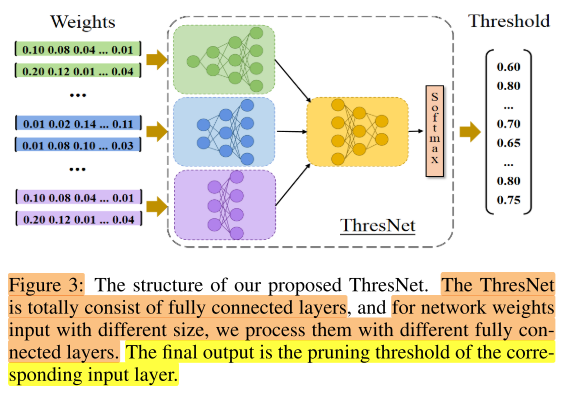
图3说明:
训练一个代理网络ThresNet,作用是根据backbone网络的不同状态(不同时刻,backbone网络的 \(\alpha\) 不同),计算该状态下backbone网络的各层filter的阈值 \(\beta^{l}\) 。
-
网络输出:各层的阈值 \(\beta\) (e.g. T为16层,则输出为16维的向量);
输出是维度是固定的(e.g. 长度=16的向量)
-
网络输入:各层的结构参数 \(\alpha\)(weights);
但输入的维度是不固定的(输入是16个向量,每个向量的长度=对应层的通道数),如一个backbone网络共有3种通道数(如16/32/64),那么输入的一组向量有的是16维,有的是32维,有的是64维,ThresNet网络分为2部分,第一部分就设置3个全连接网络,接收这3种不同维度的向量,将维度都统一到128;第二部分(应该)也是一个全连接网络,输入为3个128维的向量,输出为1个向量(e.g. 16维的向量,代表backbone网络16层每层的阈值)
-
ThresNet 使用强化学习进行训练,是在搜索-训练的过程中逐渐训练的,因此ThresNet也会随着 搜索-训练 的进行,而不断更新ThresNet的网络权重 \(\Phi\)
&& 为什么不能直接将 \(\alpha\) 展开成一维向量?同一个backbone网络,展开后的长度(即filter数量)应该也是固定的吧?
\(\left.R=-\left(l_{a v g}+\gamma \times \operatorname{param}(S)\right)\right) \qquad (3)\)
公式(3)说明:
R为训练ThresNet的奖励Reward
\(\nabla_{\Phi} J(\Phi) \approx \frac{1}{K} \sum_{k=1}^{K} \sum_{l=1}^{L} R_{k} \nabla_{\Phi} \log \pi_{\Phi}\left(\beta^{l} \mid \alpha^{l}\right) \qquad (4)\)
公式(4)说明:
&& 强化学习更新ThresNet的网络权重 \(\Phi\)
&& 应该是训练完 ThresNet 再进行 搜索-训练
算法细节
A2.s1 初始化 backbone 网络
\(\mathbb{O}^{l}=\operatorname{Concat}\left(\mathbb{I}^{l} * W_{1}^{l}, \mathbb{I}^{l} * W_{2}^{l}, \cdots, \mathbb{I}^{l} * W_{\mathbb{C}_{l}}^{l}\right) \qquad (5)\)
公式(5)说明:
- \(\mathbb{I}^{l}\) 表示第 l 层的输入feature map
- \(W^l_c\) 表示第 l 层的第 c 个filter
- *代表卷积操作
\(\mathbb{O}^{l}=\operatorname{Concat}\left(\mathbb{I}^{l} * \hat{\alpha}_{1}^{l} W_{1}^{l}, \mathbb{I}^{l} * \hat{\alpha}_{2}^{l} W_{2}^{l}, \cdots, \mathbb{I}^{l} * \hat{\alpha}_{C_{l}}^{l} W_{C_{l}}^{l}\right) \qquad s.t. \hat{\alpha}_{c}^{l}=\frac{\exp \left(\alpha_{c}^{l}\right)}{\sum_{k=1}^{C_{l}} \exp \left(\alpha_{k}^{l}\right)} \qquad(6)\)
公式(6)说明:
- 引入结构参数\(\alpha\),\(\alpha_c^l\) 对应第 l 层第c个filter
- \(\hat{\alpha}\) 代表softmax后的 \(\alpha\)
kaiming normal 初始化网络T的权重W(parameter)和结构参数 \(\alpha\)(weight)
A2.s3 粗训练 backbone 网络
\(\begin{aligned} \ell_{\text {coarse}}=& \text {CrossEntropyLoss}\left(y_{i}, \mathcal{T}\left(x_{i}, \Omega, \alpha\right)\right) +\lambda\|\alpha\|_{2} \end{aligned} \qquad(1)\)
公式(1)说明:
- T是大网络(搜索空间)
- \(\Omega\) 是网络权重(parameter),即上面的W
- \(\alpha\) 是结构参数
- \(\lambda\) 是超参
使用以上的loss粗训练网络100个epochs(for cifar),或40个epochs(for ImageNet)
A2.s4~s12 反复搜索(采样)与训练子网络
A2.s5 采样子网络
重复采样T个子网络,实验中(T=30 for cifar,T=20 for ImageNet)
采样是逐层地采样,每一层都采样完即可组成一个子网络。
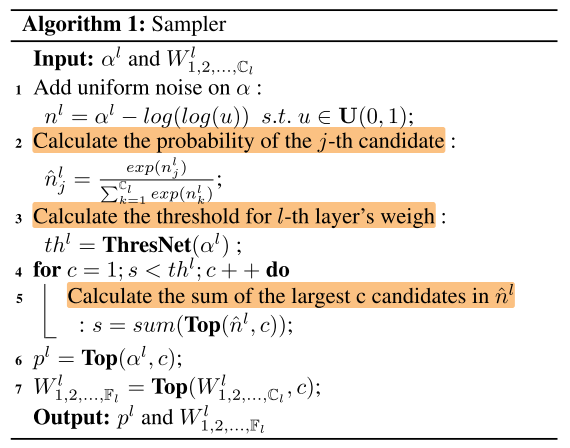
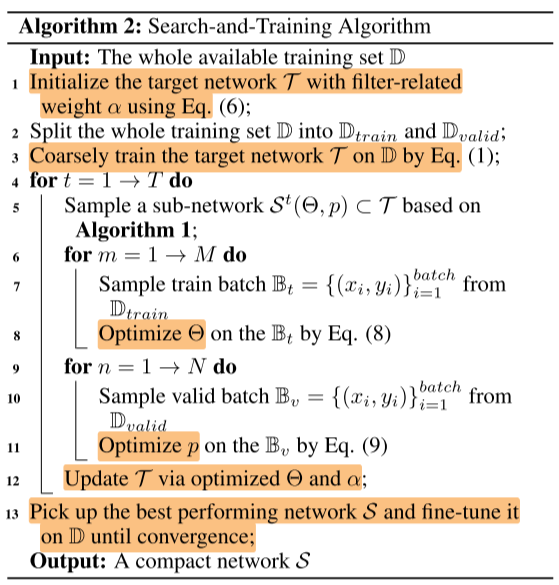
算法1说明:
- 输入:l 层的 \(\alpha^l\) 和 filter \(W_{1,2, \ldots, \mathrm{C}_{l}}^{l}\) ,\(C_l\) 是 l 层的通道数
- 输出:子网络filter的结构参数:\(p^{l}\) ,子网络的 filter \(W_{1,2, \ldots, F_{l}}^{l}\)
- 步骤:
- A1.s1 给 \(\alpha^l\) 添加随机扰动,扰动后的结构参数记为 \(n^l\)
- A1.s2计算 \(n^l\) 的softmax,记为 \(\hat{n}^l\)
- A1.s3 使用ThresNet 计算 l 层的阈值 \(th^{l}\)
- A1.s4~s5 将 l 层的卷积核按 \(\hat{n}^l\) 的大小逐一累加,直到累加和大于阈值 \(th^{l}\) 停止,此时累加的个数为c
- A1.s6 取向量 \(\alpha^l\) ( \(C_l\) 维)的前c个元素,组成新向量 \(p^{l}\) (c维)
- A1.s7 保留前c个filter
每一层都采样完即可组成一个子网络。
A2.s6~s11 训练子网络
子网络有2组参数,一组是网络权重 \(\Theta\) ,一组是结构参数 \(\alpha\)
在 \(\mathbb{D}_{\text {train}}\) 上训练M个(实验中M=10 for ImageNet)epochs,更新网络权重 \(\Theta\) :
\(\Theta=\underset{\Theta}{\operatorname{argmin}} \sum_{i=1}^{\mathbb{B}_{t}} \ell_{\operatorname{train}}\left(y_{i}, \mathcal{S}\left(x_{i}, \Theta, p\right)\right) \qquad (8)\)
在 \(\mathbb{D}_{\text {valid}}\) 上训练N个(实验中N=2 for ImageNet)epochs,更新结构参数 \(\alpha\) :
\(p=\underset{p}{\operatorname{argmin}} \sum_{i=1}^{\mathbb{B}_{v}} \ell_{v a l}\left(y_{i}, \mathcal{S}\left(x_{i}, \Theta, p\right)\right) \qquad (9)\)
A2.s13 取出最佳子网fine-tune到收敛
训练到收敛,没有说具体的epochs
Experiments
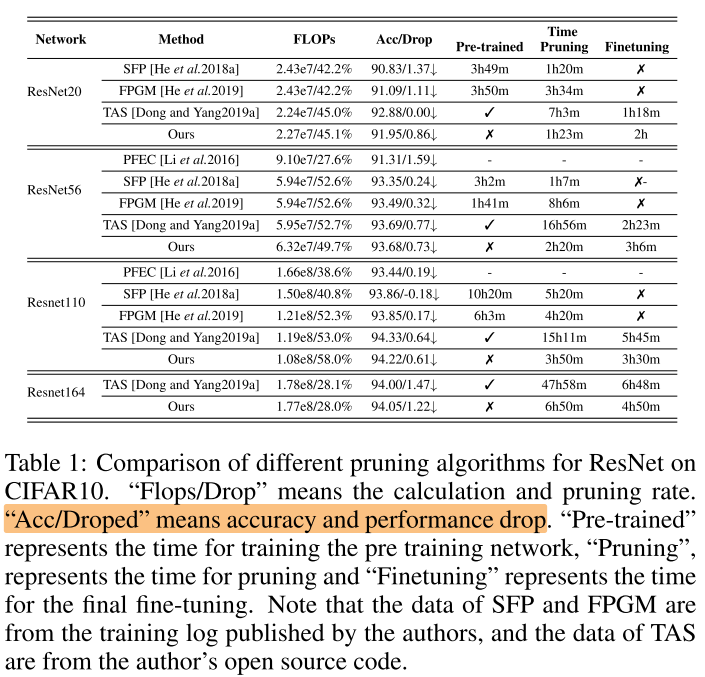
CIFAR-10
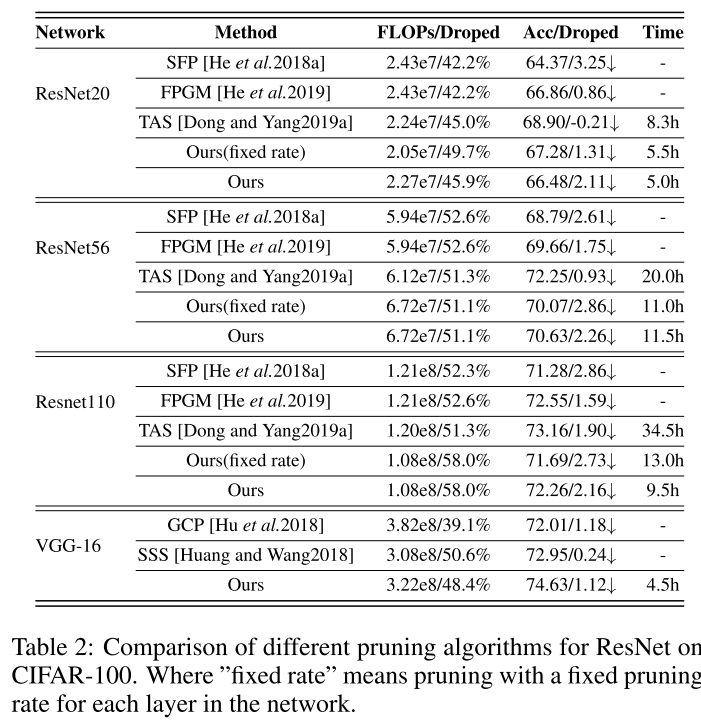
CIFAR-100
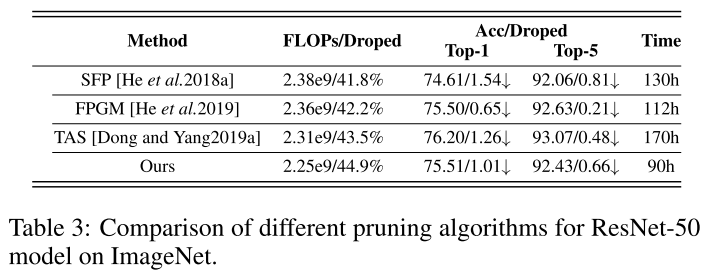
ImageNet
Conclusion
Summary
- 对比的都是比较早的文章?
- 给每个filter赋予一个结构参数(表征该filter的重要性),不断从backbone网络中抽样(保留最重要的前k个filter)子网进行训练,迭代更新网络权重和结构参数(每个
- 方法看起来很复杂,比如:
- 在大网络中选取子网络不是用直观的概率抽样(nas中),也不是用全局的统一阈值(全局剪枝),而是用一个代理全连接网络 ThresNet 来预测每一层的阈值(这个阈值又不是直接小于阈值filter删除,而是累加最大的k个,直到达到阈值)
- 使用全连接网络预测每一层的阈值,应该可以直接展开成一维,却要使用多级全连接层;还有sampler加的一些随机扰动等等,感觉为了复杂而复杂,不够简洁
- 核心就是类似one-shot的在超网中抽样子网进行训练
- 暂时没有开源

 浙公网安备 33010602011771号
浙公网安备 33010602011771号