磁盘调度算法及其应用
导读:
磁盘调度是计算机系统中的重要问题之一。在多个进程同时访问磁盘时,合理的磁盘调度算法可以优化磁盘访问顺序,提高系统性能。本文将介绍磁盘调度算法的基本思想,并通过一个实验来模拟不同调度算法的运行过程。
正文:
在计算机系统中,磁盘是一种高速、大容量、可直接存取的存储设备,常用作辅助存储器。然而,由于磁盘的物理结构和工作原理,磁盘访问时间主要受寻道时间的影响,因此合理的磁盘调度算法对于降低寻道时间、提高系统性能非常重要。
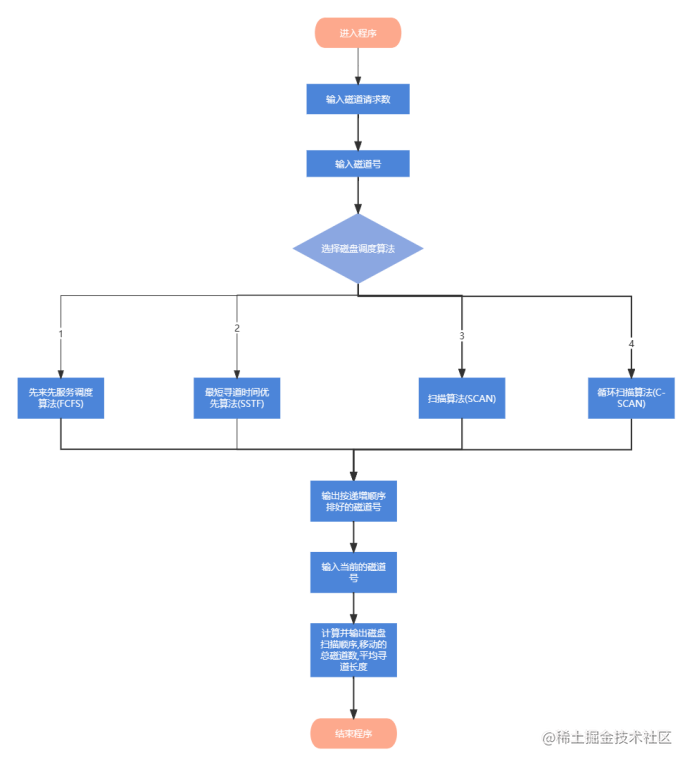
本篇博客模拟设计一个磁盘调度程序,观察不同调度算法的动态运行过程,并比较它们的性能。实验内容包括四种磁盘调度算法:先来先服务调度算法(FCFS)、最短寻道时间优先算法(SSTF)、扫描算法(SCAN)和循环扫描算法(C-SCAN)。通过计算移动的总磁道数和平均寻道长度,评估各算法的效果。
在实验过程中,我们采用了一组测试数据,包括磁盘读写请求队列和当前磁头位置。首先,我们针对每种算法编写了相应的代码,并按照流程图进行实现。代码中使用了冒泡排序法对磁道号进行递增排序,以便后续的调度操作。
先来先服务调度算法(FCFS)是最简单的调度算法之一。它按照请求的先后顺序进行调度,不考虑磁道的位置。在实验中,我们根据给定的磁道号队列和当前磁头位置,输出磁盘调度顺序,并计算移动的总磁道数和平均寻道长度。
最短寻道时间优先算法(SSTF)则根据当前磁头位置选择离它最近的磁道进行访问。在实验中,我们对磁道号进行递增排序后,根据当前磁头位置选择合适的方向进行访问,直到服务完所有请求。同样地,我们计算移动的总磁道数和平均寻道长度。
扫描算法(SCAN)是一种具有方向性的调度算法,它沿着磁道的一个方向移动,直到最后一个请求,然后改变方向返回,直到处理完所有请求。在实验中,我们首先确定磁头移动的方向,然后按照该方向顺序依次处理请求,直到所有请求完成。我们计算移动的总磁道数和平均寻道长度。
循环扫描算法(C-SCAN)是扫描算法的改进版本。它也是沿着一个方向移动,直到最后一个请求,然后立即返回到最开始的磁道,继续按照相同的方向处理请求。在实验中,我们按照递增排序后的磁道号顺序处理请求,计算移动的总磁道数和平均寻道长度。
完整代码:
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
// 先来先服务调度算法(FCFS)
void FCFS(int a[], int n) {
int sum = 0, i, now;
float ave;
printf("请输入当前的磁道号: ");
scanf("%d", &now);
printf("磁盘调度顺序为:\n");
for (i = 1; i < n; i++) {
printf("%d ", a[i]); // 按访问顺序输出磁道号
}
for (i = 0; i < n - 1; i++) {
sum += abs(a[i + 1] - a[i]); // 计算移动的总磁道数,abs取绝对值
}
ave = (float)(sum) / (n - 1); // 求平均寻道长度
printf("\n");
printf("移动的总磁道数:%d\n", sum);
printf("平均寻道长度:%.2f\n", ave);
}
// 最短寻道时间优先算法(SSTF)
void SSTF(int a[], int n) {
int temp; // 中间变量
int k = 1;
int now, l, r;
int i, j, sum = 0;
float ave;
// 将磁道号按递增排序(冒泡排序法)
for (i = 0; i < n; i++) {
for (j = i + 1; j < n; j++) {
if (a[i] > a[j]) {
temp = a[i];
a[i] = a[j];
a[j] = temp;
}
}
}
printf("按递增顺序排好的磁道号依次为:\n");
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
}
printf("\n");
printf("请输入当前的磁道号:");
scanf("%d", &now); // 确定当前磁头所在位置
printf("磁盘扫描顺序为:\n");
if (a[n - 1] == now) { // 当前磁道号是请求序列中最大者,则直接由外向内依次给予各请求服务
for (i = n - 1; i >= 0; i--) {
sum = now - a[0];
printf("%d ", a[i]);
}
} else if (a[0] == now) { // 当前磁道号是请求序列中最小者,则直接由内向外依次给予各请求服务
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
}
sum = a[n - 1] - now;
} else if (now > a[0] && now < a[n - 1]) { // 若当前磁道号在最大与最小磁道号之间
// 找到当前磁道号右边的磁道
for (i = 0; i < n; i++) {
if (a[i] > now) {
k = i;
break;
}
}
l = k - 1; // 左边磁道索引
r = k; // 右边磁道索引
while (l >= 0 && r < n) {
if (now - a[l] <= a[r] - now) {
printf("%d ", a[l]);
sum += now - a[l];
now = a[l];
l--;
} else {
printf("%d ", a[r]);
sum += a[r] - now;
now = a[r];
r++;
}
}
if (l < 0) {
while (r < n) {
printf("%d ", a[r]);
sum += a[r] - now;
now = a[r];
r++;
}
} else if (r >= n) {
while (l >= 0) {
printf("%d ", a[l]);
sum += now - a[l];
now = a[l];
l--;
}
}
}
ave = (float)sum / n; // 计算平均寻道长度
printf("\n");
printf("移动的总磁道数:%d\n", sum);
printf("平均寻道长度:%.2f\n", ave);
}
// 扫描算法(SCAN)
void SCAN(int a[], int n) {
int temp; // 中间变量
int k = 1;
int now, l, r;
int i, j, sum = 0;
float ave;
// 将磁道号按递增排序(冒泡排序法)
for (i = 0; i < n; i++) {
for (j = i + 1; j < n; j++) {
if (a[i] > a[j]) {
temp = a[i];
a[i] = a[j];
a[j] = temp;
}
}
}
printf("按递增顺序排好的磁道号依次为:\n");
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
}
printf("\n");
printf("请输入当前的磁道号:");
scanf("%d", &now); // 确定当前磁头所在位置
printf("磁盘扫描顺序为:\n");
if (a[n - 1] == now) { // 当前磁道号是请求序列中最大者,则直接由外向内依次给予各请求服务
for (i = n - 1; i >= 0; i--) {
printf("%d ", a[i]);
sum += now - a[i];
now = a[i];
}
} else if (a[0] == now) { // 当前磁道号是请求序列中最小者,则直接由内向外依次给予各请求服务
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
sum += a[i] - now;
now = a[i];
}
} else if (now > a[0] && now < a[n - 1]) { // 若当前磁道号在最大与最小磁道号之间
// 找到当前磁道号右边的磁道
for (i = 0; i < n; i++) {
if (a[i] > now) {
k = i;
break;
}
}
l = k - 1; // 左边磁道索引
r = k; // 右边磁道索引
while (l >= 0 && r < n) {
printf("%d ", a[r]);
sum += a[r] - now;
now = a[r];
r++;
}
if (l < 0) {
while (r < n) {
printf("%d ", a[r]);
sum += a[r] - now;
now = a[r];
r++;
}
} else if (r >= n) {
while (l >= 0) {
printf("%d ", a[l]);
sum += now - a[l];
now = a[l];
l--;
}
}
}
ave = (float)sum / n; // 计算平均寻道长度
printf("\n");
printf("移动的总磁道数:%d\n", sum);
printf("平均寻道长度:%.2f\n", ave);
}
// 循环扫描算法(C-SCAN)
void CSCAN(int a[], int n) {
int temp; // 中间变量
int k = 1;
int now, l, r;
int i, j, sum = 0;
float ave;
// 将磁道号按递增排序(冒泡排序法)
for (i = 0; i < n; i++) {
for (j = i + 1; j < n; j++) {
if (a[i] > a[j]) {
temp = a[i];
a[i] = a[j];
a[j] = temp;
}
}
}
printf("按递增顺序排好的磁道号依次为:\n");
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
}
printf("\n");
printf("请输入当前的磁道号:");
scanf("%d", &now); // 确定当前磁头所在位置
printf("磁盘扫描顺序为:\n");
if (a[n - 1] == now) { // 当前磁道号是请求序列中最大者,则直接由外向内依次给予各请求服务
for (i = n - 1; i >= 0; i--) {
printf("%d ", a[i]);
sum += now - a[i];
now = a[i];
}
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
sum += a[i] - now;
now = a[i];
}
} else if (a[0] == now) { // 当前磁道号是请求序列中最小者,则直接由内向外依次给予各请求服务
for (i = 0; i < n; i++) {
printf("%d ", a[i]);
sum += a[i] - now;
now = a[i];
}
for (i = n - 1; i >= 0; i--) {
printf("%d ", a[i]);
sum += now - a[i];
now = a[i];
}
} else if (now > a[0] && now < a[n - 1]) { // 若当前磁道号在最大与最小磁道号之间
// 找到当前磁道号右边的磁道
for (i = 0; i < n; i++) {
if (a[i] > now) {
k = i;
break;
}
}
l = k - 1; // 左边磁道索引
r = k; // 右边磁道索引
while (l >= 0 && r < n) {
printf("%d ", a[r]);
sum += a[r] - now;
now = a[r];
r++;
}
if (l < 0) {
printf("%d ", a[n - 1]); // 最右边的磁道
sum += a[n - 1] - now;
now = a[n - 1];
for (i = n - 2; i >= 0; i--) {
printf("%d ", a[i]);
sum += now - a[i];
now = a[i];
}
} else if (r >= n) {
printf("%d ", a[0]); // 最左边的磁道
sum += now - a[0];
now = a[0];
for (i = 1; i < n; i++) {
printf("%d ", a[i]);
sum += a[i] - now;
now = a[i];
}
}
}
ave = (float)sum / n; // 计算平均寻道长度
printf("\n");
printf("移动的总磁道数:%d\n", sum);
printf("平均寻道长度:%.2f\n", ave);
}
int main() {
int n, i;
int a[20];
printf("请输入磁道请求数:");
scanf("%d", &n);
printf("请输入磁道号:");
for (i = 0; i < n; i++) {
scanf("%d", &a[i]);
}
printf("请选择磁盘调度算法:\n");
printf("1. 先来先服务调度算法(FCFS)\n");
printf("2. 最短寻道时间优先算法(SSTF)\n");
printf("3. 扫描算法(SCAN)\n");
printf("4. 循环扫描算法(C-SCAN)\n");
int choice;
printf("请输入选择的算法:");
scanf("%d", &choice);
switch (choice) {
case 1:
FCFS(a, n);
break;
case 2:
SSTF(a, n);
break;
case 3:
SCAN(a, n);
break;
case 4:
CSCAN(a, n);
break;
default:
printf("无效选择\n");
break;
}
return 0;
}
流程图
结论
通过实验比较四种磁盘调度算法的性能,我们可以得出以下结论:
- FCFS算法简单直接,但可能导致平均寻道长度较长,性能相对较低。
- SSTF算法能够减少寻道时间,但可能导致部分请求长时间等待,存在饥饿现象。
- SCAN算法和C-SCAN算法通过方向性移动可以较好地均衡请求的处理,减少饥饿现象,但可能导致移动的总磁道数较多。
需要注意的是,磁盘调度算法的选择应根据具体的应用场景和需求进行权衡。不同的算法可能适用于不同的场景,具体的选择需要综合考虑各种因素,如磁盘负载、请求队列的特征等。
总结起来,磁盘调度算法是优化磁盘访问顺序、提高系统性能的重要手段。通过实验和比较不同的算法,可以选择合适的磁盘调度策略。然而,随着技术的发展和硬件的进步,新的磁盘调度算法也在不断涌现,以应对不同场景下的需求。因此,磁盘调度算法的研究和优化仍然具有重要的意义。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号