Harris角点检测算法
一,角点
算法流程
- 1.利用水平,竖直差分算子对图像的每个像素进行滤波以求得Ix,Iy,进而求得M中的四个元素的值。

代码中如果窗口数组array为-1,0,1,-1,0,1,-1,0,1}则是求解X方向的,如果为{-1,-1,-1,0,0,0,1,1,1}为Y方向的,则Ix和Iy求解结束,求解IX2相对比较简单,像素相乘即可。
- 2.对M的四个元素进行高斯平滑滤波,为的是消除一些不必要的孤立点和凸起,得到新的矩阵M。
- 3.3.接下来利用M计算对应每个像素的角点响应函数R,即:

- 4、局部极大值抑制,同时选取其极大值
- 5.在矩阵R中,同时满足R(i,j)大于一定阈值threshold和R(i,j)是某领域内的局部极大值,则被认为是角点


三,代码
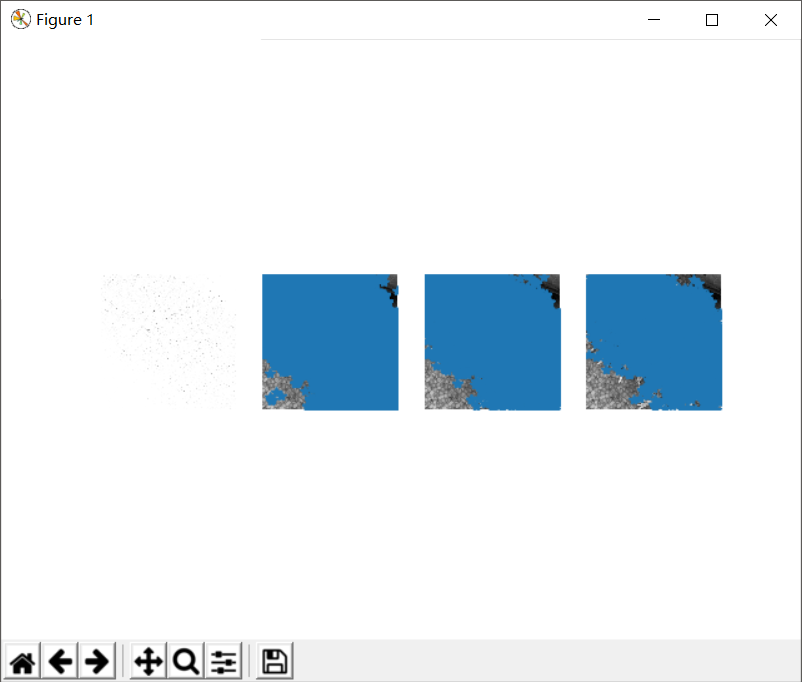
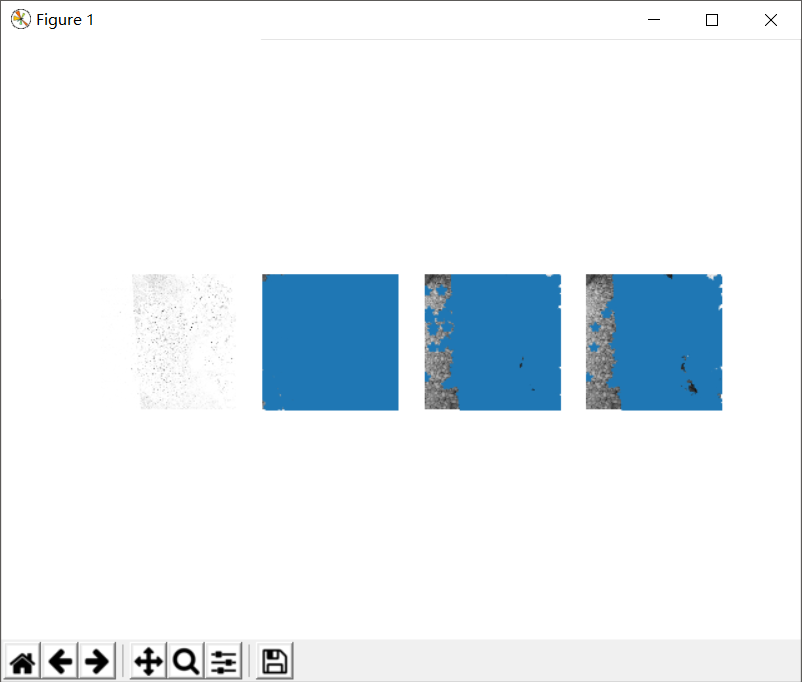
1 from pylab import * 2 from PIL import Image 3 from PCV.localdescriptors import harris 4 """ 5 Example of detecting Harris corner points (Figure 2-1 in the book). 6 """ 7 # 读入图像 8 im = array(Image.open(r'b3.jpg').convert('L')) 9 # 检测harris角点 10 harrisim = harris.compute_harris_response(im) 11 # Harris响应函数 12 harrisim1 = 255 - harrisim 13 figure() 14 gray() 15 #画出Harris响应图 16 subplot(141) 17 imshow(harrisim1) 18 print (harrisim1.shape) 19 axis('off') 20 axis('equal') 21 threshold = [0.01, 0.05, 0.1] 22 for i, thres in enumerate(threshold): 23 filtered_coords = harris.get_harris_points(harrisim, 6, thres) 24 subplot(1, 4, i+2) 25 imshow(im) 26 print (im.shape) 27 plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*') 28 axis('off') 29 show()
四,运行结果
4.1纹理平坦的图
4.1.1正面
4.1.2侧面

4.1.3旋转

4.1.4相对较远处


4.1.5较亮情况


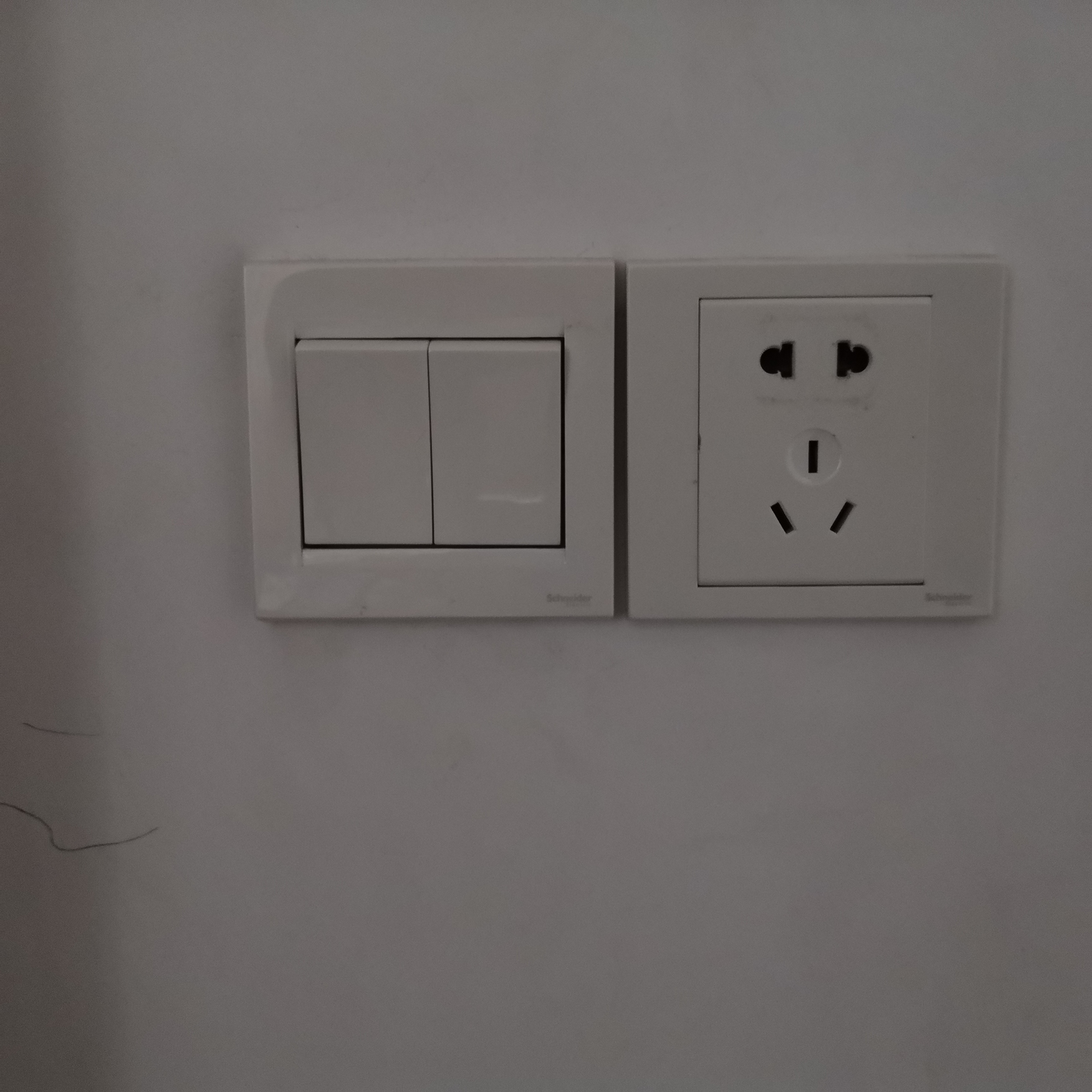
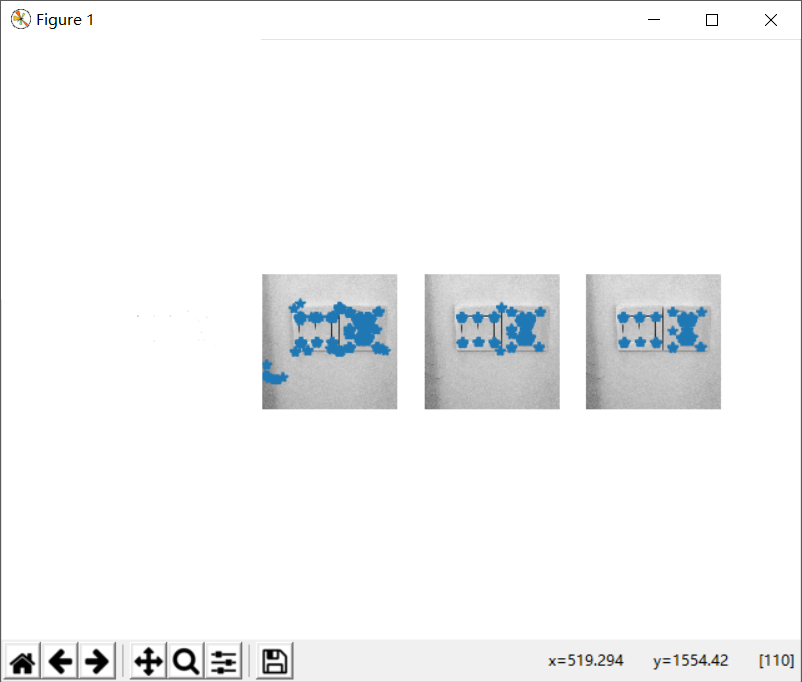
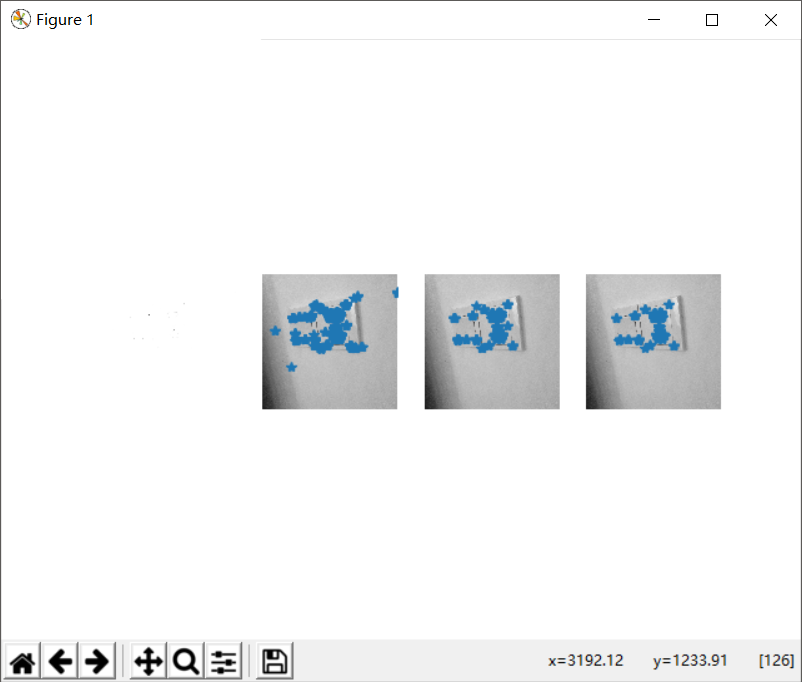
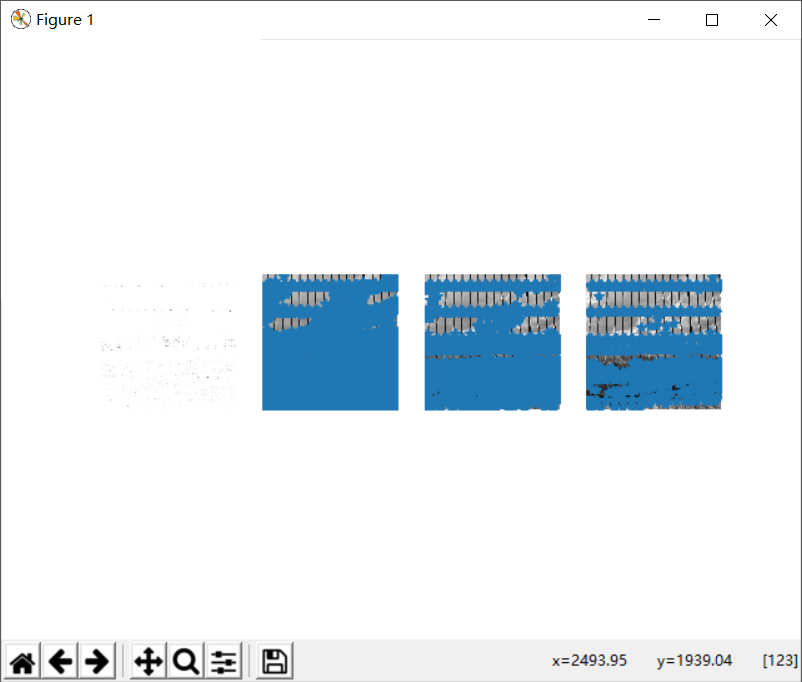
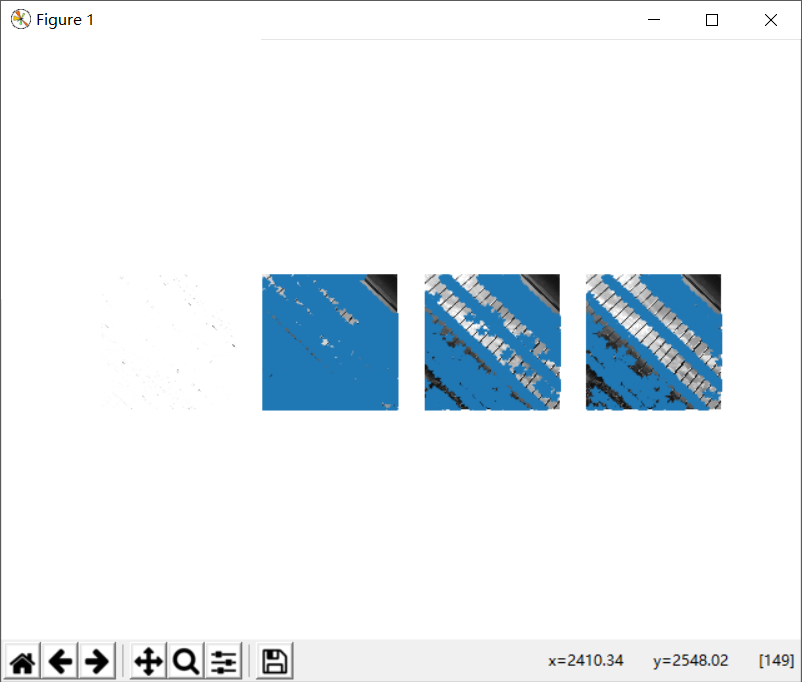
4.2垂直或水平边缘多
4.2.1正面

4.2.2侧面


4.2.3旋转

4.2.4相对较远处

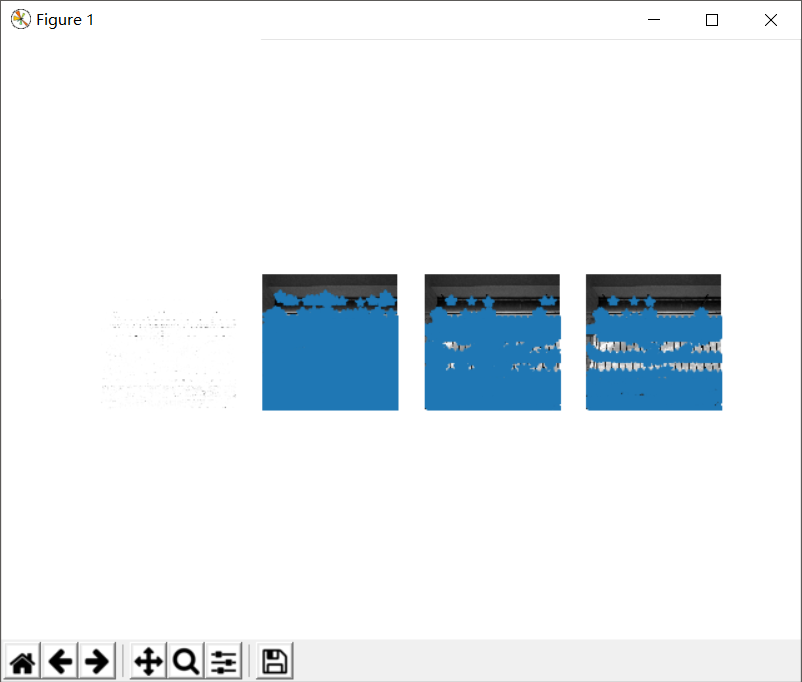
4.3纹理角点丰富
4.3.1正面


4.3.2侧面

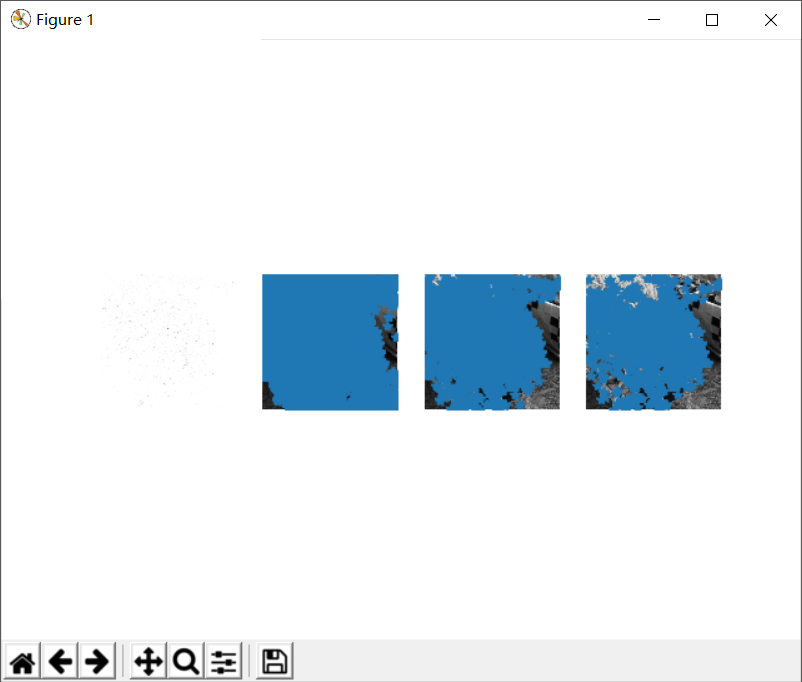
4.3.3旋转

4.3.4相对较远处

五,结论以及实验中遇到的问题
5.1实验结果分析
1. Harris角点具有旋转不变性。
Harris角点检测通过窗口对应的二阶矩阵M 的特征值得到角点响应值R,从而判断角点。当图像转动时,角点区域的像素点梯度坐标和拟合椭圆对应地发生旋转,但是矩阵的特征值(也可以理解为数据点区域的拟合椭圆)不变,因此图像旋转不影响角点的检测。
2. Harris角点检测算子对亮度和对比度的变化不灵敏
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,阈值的选择可能会影响角点检测的结果。
3. Harris角点检测算子不具有尺度不变性
当图像被缩小或放大时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的,角点检测的性能也会发生改变。
5.2实验中遇到的问题
PCV,是一个很老的包了,从下载地址:https://github.com/jesolem/PCV (原链接,适用于python2),但在python3的时代里已不适用。需要将原文件里的多个print语句改写成python3的形式才能正常安装。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号