zephyr学习:zephyr 按键+串口通信
参考:应用程序开发 — Zephyr Project Documentation --- Application Development — Zephyr Project Documentation
硬件: 立创实战派开发板(esp32-s3)
注:代码已上传github cc1234github/lichuang_shizhanpai_zephyr: use lichuang shizhan board study zephyr
1. 创建App工作空间
1.1 官方app_demo
官方给出了一个app文件的例子,我们可以使用这个文件来创建自己的zephyr App 工作空间,git地址如下:
cd <home>/zephyrproject git clone https://github.com/zephyrproject-rtos/example-application my-app
1.2 app 文件结构
app中应该包含下面这些文件内容:
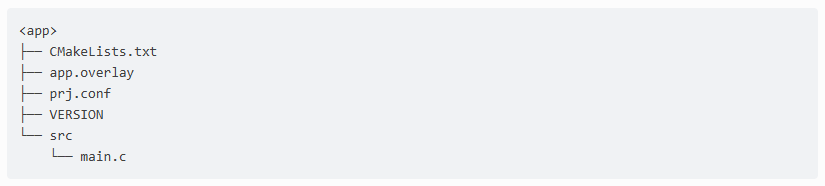
- CMakeLists.txt:此文件告诉构建系统在哪里可以找到其他应用程序文件,并将应用程序目录与 Zephyr 的 CMake 构建系统链接。
- app.overlay: 设备树覆盖文件,可以覆盖调用的那个板子上的硬件信息。
- prj.conf: 工程配置项,一般配置软件功能
- VERSION:版本
- SRC: c文件
然后工程文件也是可以创建到三个地方的:
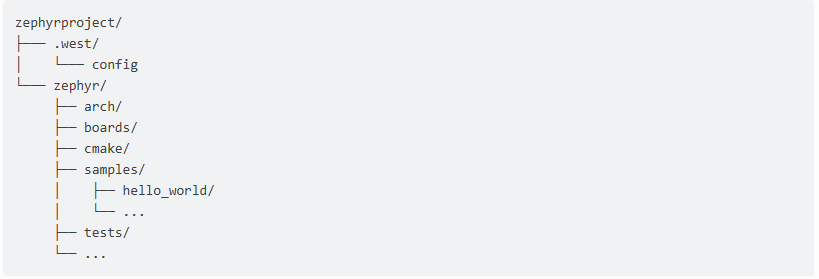
- 1. 放到west工作区zephyr源码下面,但是这样会污染zephyr工程,下次更新zephyr时比较麻烦。❌
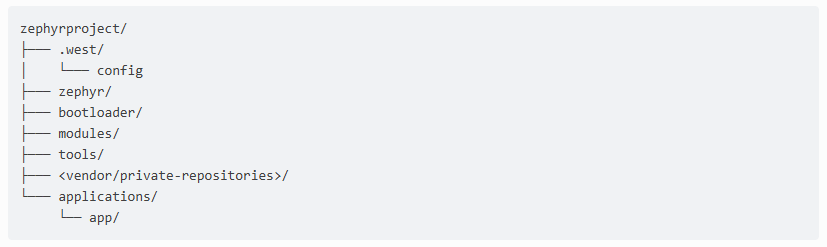
- 2. 放到west工作区,但是单独放文件,编译方便,✔️
- 3. 不放在west工作区,放到任意地方,需要配置环境变量✔️
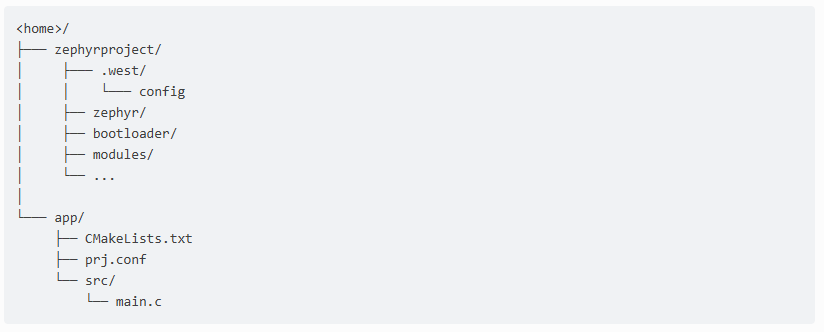
我选择了第三种方式:
注意:在zephyr源文件之外的地方编译工程需要添加几个环境变量

- ZEPHYR_BASE:zephyr主文件夹的地方
- ZEPHYR_SDK_INSTALL_DIR :指定编译工具的位置
- ZEPHYR_TOOLCHAIN_VARIANT : 指定编译工具链
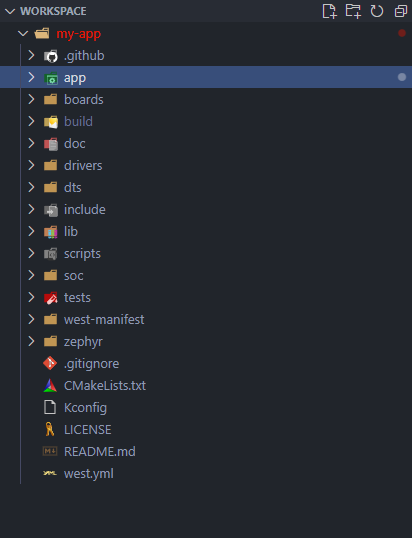
下载了app-demo工程文件后,结构如下:包含了很多东西,大部分都暂时用不上
2. 自定义板子
由于zephyr中没有立创实战派这个板子,我打算自定义一个。
-
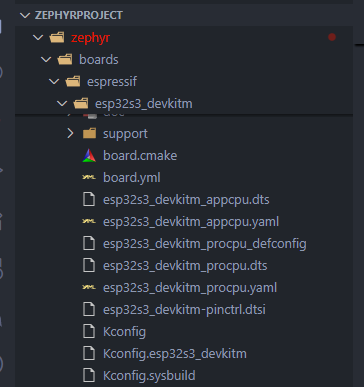
先去zephyr源码中找到资源类似的板子(直接搜esp32-s3)
2. 复制到工程后,放置目录如下( boards\espressif\lc_shizhanpai ),修改文件名字。
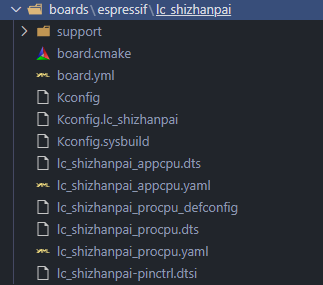
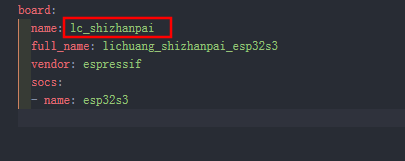
3. 修改board.yml,把名字改成和文件一样的
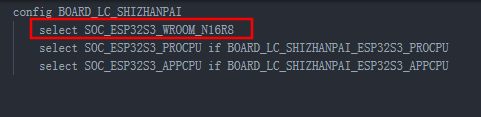
4. 修改Kconfig.lc_shizhanpai 的SOC,开发板用的 N16R8
5. 因为改了芯片,所以头文件也要改
6. 引脚复用也改成开发板的 lc_shizhanpai-pinctrl.dtsi
/* * Copyright (c) 2022 Espressif Systems (Shanghai) Co., Ltd. * * SPDX-License-Identifier: Apache-2.0 */ #include <zephyr/dt-bindings/pinctrl/esp-pinctrl-common.h> #include <dt-bindings/pinctrl/esp32s3-pinctrl.h> #include <zephyr/dt-bindings/pinctrl/esp32s3-gpio-sigmap.h> &pinctrl { uart0_default: uart0_default { group1 { pinmux = <UART0_TX_GPIO43>; output-high; }; group2 { pinmux = <UART0_RX_GPIO44>; bias-pull-up; }; }; uart1_default: uart1_default { group1 { pinmux = <UART1_TX_GPIO17>; output-high; }; group2 { pinmux = <UART1_RX_GPIO18>; bias-pull-up; }; }; };
7. 修改procpu的device tree,只用procpu这一个内核
/ { model = "lc_shizhanpai PROCPU"; compatible = "espressif,esp32s3"; aliases { sw2 = &button0; }; chosen { zephyr,sram = &sram1; zephyr,console = &uart0; zephyr,shell-uart = &uart0; zephyr,flash = &flash0; zephyr,code-partition = &slot0_partition; }; buttons { compatible = "gpio-keys"; button0: button_0 { gpios = <&gpio0 0 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>; label = "BOOT Button"; zephyr,code = <INPUT_KEY_0>; }; }; }; &uart0 { status = "okay"; current-speed = <115200>; pinctrl-0 = <&uart0_default>; pinctrl-names = "default"; }; &gpio0 { status = "okay"; }; &gpio1 { status = "okay"; }; &timer0 { status = "disabled"; }; &timer1 { status = "disabled"; }; &timer2 { status = "disabled"; }; &timer3 { status = "disabled"; };
&usb_serial { status = "disabled"; };
3. app程序
main.c
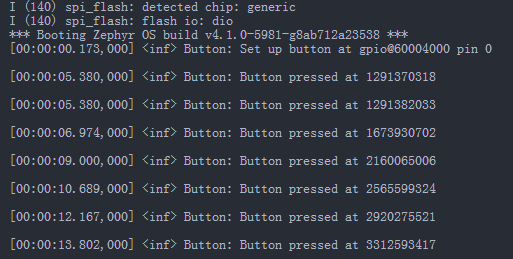
主要就是获取sw2这个节点,然后调用一个中断,每次中断按下就会打印当前的主程序运行周期
#include <zephyr/kernel.h> #include <zephyr/device.h> #include <zephyr/drivers/gpio.h> #include <zephyr/devicetree.h> #include <zephyr/sys/printk.h> #include <zephyr/logging/log.h> // 注册一个日志模块 LOG_MODULE_REGISTER(Button, LOG_LEVEL_INF); /* * Get button configuration from the devicetree sw0 alias. This is mandatory. */ #define SW0_NODE DT_ALIAS(sw2) #if !DT_NODE_HAS_STATUS_OKAY(SW0_NODE) #error "Unsupported board: sw0 devicetree alias is not defined" #endif static const struct gpio_dt_spec button = GPIO_DT_SPEC_GET_OR(SW0_NODE, gpios, {0}); static struct gpio_callback button_cb_data; void button_pressed(const struct device *dev, struct gpio_callback *cb, uint32_t pins) { LOG_INF("Button pressed at %" PRIu32 "\n", k_cycle_get_32()); } int main(void) { int ret; if (!gpio_is_ready_dt(&button)) { LOG_INF("Error: button device %s is not ready\n", button.port->name); return 0; } ret = gpio_pin_interrupt_configure_dt(&button, GPIO_INT_EDGE_TO_ACTIVE); if (ret != 0) { LOG_INF("Error %d: failed to configure interrupt on %s pin %d\n", ret, button.port->name, button.pin); return 0; } gpio_init_callback(&button_cb_data, button_pressed, BIT(button.pin)); gpio_add_callback(button.port, &button_cb_data); LOG_INF("Set up button at %s pin %d\n", button.port->name, button.pin); while (1) { k_msleep(1); } }
app.overlay
app.overlay 文件 我这里暂时没用,因为上面我自定义了板子,我直接在DTS里面去改了
CMakeLists.txt
添加了指定板子 和 设置BOARD_ROOT
- set (BOARD xxx) 方便编译烧录
- BOARD_ROOT zephyr会在这个下面去找我自己定义的板子,不设置会找不到板子
#------------------------------------------------------------------------------- # Zephyr Example Application # # Copyright (c) 2021 Nordic Semiconductor ASA # SPDX-License-Identifier: Apache-2.0 cmake_minimum_required(VERSION 3.13.1) # 指定板子,build/flash 时直接使用west build,不用指定板子了 set(BOARD lc_shizhanpai) # 设定 BOARD_ROOT 指向工作空间的目录(不然会找不到自己定义的板子) get_filename_component(PARENT_DIR ${CMAKE_CURRENT_SOURCE_DIR} DIRECTORY) list(APPEND BOARD_ROOT ${PARENT_DIR}) find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE}) # 查找 Zephyr 包 project(my_led LANGUAGES C) # 定义工程 target_sources(app PRIVATE src/main.c)
prj.conf
CONFIG_MAIN_STACK_SIZE=4096 CONFIG_LOG=y CONFIG_LOG_DEFAULT_LEVEL=3 CONFIG_GPIO=y
4. 编译烧录
每按一次按键,就打印一次

 浙公网安备 33010602011771号
浙公网安备 33010602011771号