图解kubernetes scheduler基于map/reduce模式实现优选阶段
优选阶段通过分map/reduce模式来实现多个node和多种算法的并行计算,并且通过基于二级索引来设计最终的存储结果,从而达到整个计算过程中的无锁设计,同时为了保证分配的随机性,针对同等优先级的采用了随机的方式来进行最终节点的分配,如果大家后续有类似的需求,不妨可以借鉴借鉴
1. 设计基础
1.1 两阶段: 单点与聚合
在进行优选的时候,除了最后一次计算,在进行针对单个算法的计算的时候,会分为两个阶段:单点和聚合
在单点阶段,会根据当前算法针对单个node计算
在聚合阶段,则会根据当前单点阶段计算完成后,来进行聚合
1.2 并行: 节点与算法
单点和聚合两阶段在计算的时候,都是并行的,但是对象则不同,其中单点阶段并行是针对单个node的计算,而聚合阶段则是针对算法级别的计算,通过这种设计分离计算,从而避免多goroutine之间数据竞争,无锁加速优选的计算
1.3 map与reduce
而map与reduce则是针对一个上面并行的两种具体实现,其中map中负责单node打分,而reduce则是针对map阶段的打分进行聚合后,根据汇总的结果进行二次打分计算
1.4 weight
map/reduce阶段都是通过算法计算,如果我们要进行自定义的调整,针对单个算法,我们可以调整其在预选流程中的权重,从而进行定制自己的预选流程
1.5 随机分布
当进行优先级判断的时候,肯定会出现多个node优先级相同的情况,在优选节点的时候,会进行随机计算,从而决定是否用当前优先级相同的node替换之前的最合适的node
2. 源码分析
优选的核心流程主要是在PrioritizeNodes中,这里只介绍其关键的核心数据结构设计
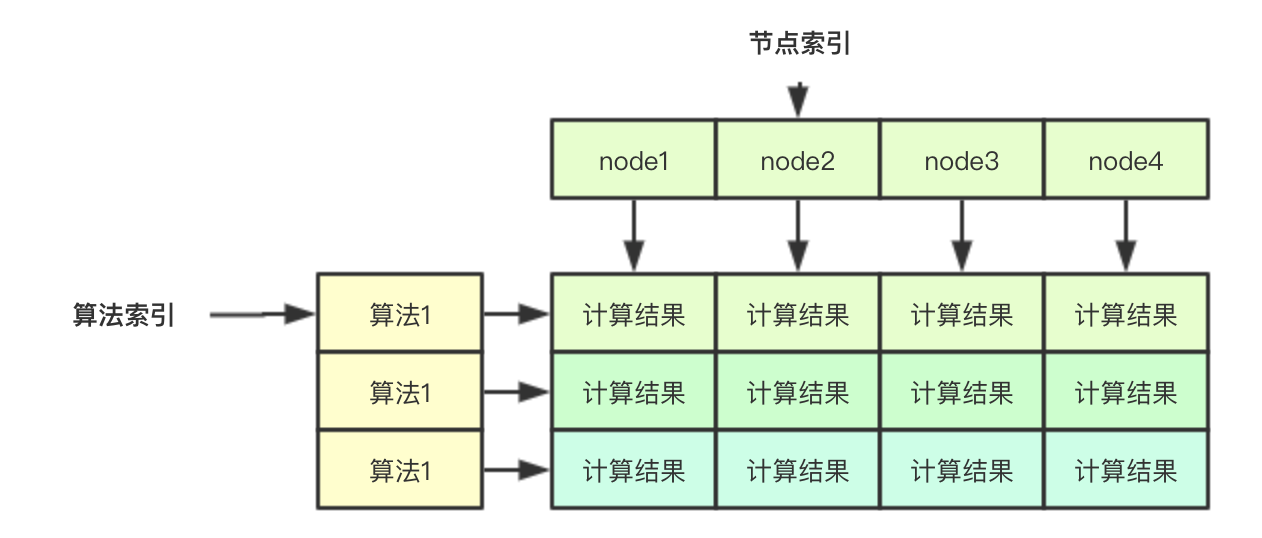
2.1 无锁计算结果保存
无锁计算结果的保存主要是通过下面的二维数组实现, 如果要存储一个算法针对某个node的结果,其实只需要通过两个索引即可:算法索引和节点索引,同理如果我吧针对单个node的索引分配给一个goroutine,则其去其他的goroutine则就可以并行计算
// 在计算的时候,会传入nodes []*v1.Node的数组,存储所有的节点,节点索引主要是指的该部分
results := make([]schedulerapi.HostPriorityList, len(priorityConfigs), len(priorityConfigs))
2.2 基于节点索引的Map计算
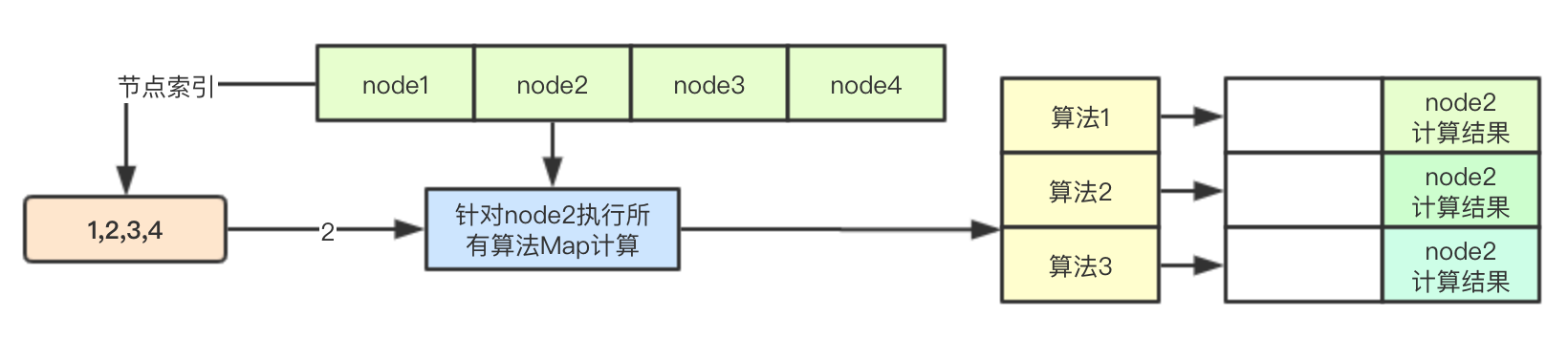
之前在预选阶段介绍过ParallelizeUntil函数的实现,其根据传入的数量来生成计算索引,放入chan中,后续多个goroutine从chan中取出数据直接进行计算即可
workqueue.ParallelizeUntil(context.TODO(), 16, len(nodes), func(index int) {
// 根据节点和配置的算法进行计算
nodeInfo := nodeNameToInfo[nodes[index].Name]
// 获取算法的索引
for i := range priorityConfigs {
if priorityConfigs[i].Function != nil {
continue
}
var err error
// 通过节点索引,来进行针对单个node的计算结果的保存
results[i][index], err = priorityConfigs[i].Map(pod, meta, nodeInfo)
if err != nil {
appendError(err)
results[i][index].Host = nodes[index].Name
}
}
})
2.3 基于算法索引的Reduce计算
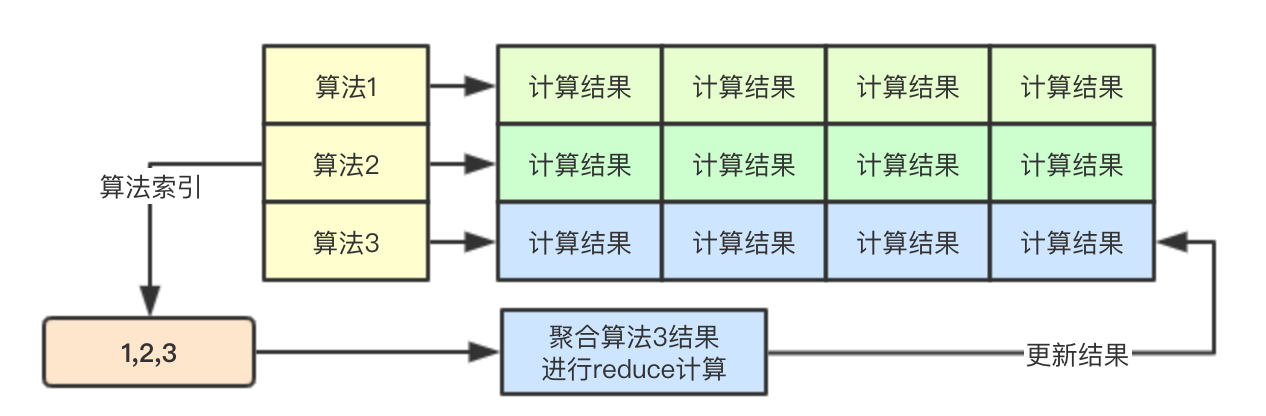
基于算法的并行,则是为每个算法的计算都启动一个goroutine,每个goroutine通过算法索引来进行该算法的所有map阶段的结果的读取,并进行计算,后续结果仍然存储在对应的位置
// 计算策略的分值
for i := range priorityConfigs {
if priorityConfigs[i].Reduce == nil {
continue
}
wg.Add(1)
go func(index int) {
defer wg.Done()
if err := priorityConfigs[index].Reduce(pod, meta, nodeNameToInfo, results[index]); err != nil {
appendError(err)
}
if klog.V(10) {
for _, hostPriority := range results[index] {
klog.Infof("%v -> %v: %v, Score: (%d)", util.GetPodFullName(pod), hostPriority.Host, priorityConfigs[index].Name, hostPriority.Score)
}
}
}(i)
}
// Wait for all computations to be finished.
wg.Wait()
2.4 优先级打分结果统计
根据之前的map/reduce阶段,接下来就是将针对所有node的所有算法计算结果进行累加即可
// Summarize all scores.
result := make(schedulerapi.HostPriorityList, 0, len(nodes))
for i := range nodes {
result = append(result, schedulerapi.HostPriority{Host: nodes[i].Name, Score: 0})
// 便利所有的算法配置
for j := range priorityConfigs {
result[i].Score += results[j][i].Score * priorityConfigs[j].Weight
}
for j := range scoresMap {
result[i].Score += scoresMap[j][i].Score
}
}
2.5 根据优先级随机筛选host
这里的随机筛选是指的当多个host优先级相同的时候,会有一定的概率用当前的node替换之前的优先级相等的node(到目前为止的优先级最高的node), 其主要通过cntOfMaxScore和rand.Intn(cntOfMaxScore)来进行实现
func (g *genericScheduler) selectHost(priorityList schedulerapi.HostPriorityList) (string, error) {
if len(priorityList) == 0 {
return "", fmt.Errorf("empty priorityList")
}
maxScore := priorityList[0].Score
selected := priorityList[0].Host
cntOfMaxScore := 1
for _, hp := range priorityList[1:] {
if hp.Score > maxScore {
maxScore = hp.Score
selected = hp.Host
cntOfMaxScore = 1
} else if hp.Score == maxScore {
cntOfMaxScore++
if rand.Intn(cntOfMaxScore) == 0 {
// Replace the candidate with probability of 1/cntOfMaxScore
selected = hp.Host
}
}
}
return selected, nil
}
3. 设计总结
优选阶段通过分map/reduce模式来实现多个node和多种算法的并行计算,并且通过基于二级索引来设计最终的存储结果,从而达到整个计算过程中的无锁设计,同时为了保证分配的随机性,针对同等优先级的采用了随机的方式来进行最终节点的分配,如果大家后续有类似的需求,不妨可以借鉴借鉴
本系列纯属个人臆测仅供参考,如果有看出错误的大佬欢迎指正
微信号:baxiaoshi2020
关注公告号阅读更多源码分析文章
更多文章关注 www.sreguide.com
本文由博客一文多发平台 OpenWrite 发布



 浙公网安备 33010602011771号
浙公网安备 33010602011771号