第一次作业,深度学习基础
深度学习
第一周的视频课程主要是对深度学习宏观上的介绍,从一些关键时间节点、代表人物、代表技术、专业术语等方面来介绍深度学习的基本功能、优缺点等。
1、视频学习
1.1
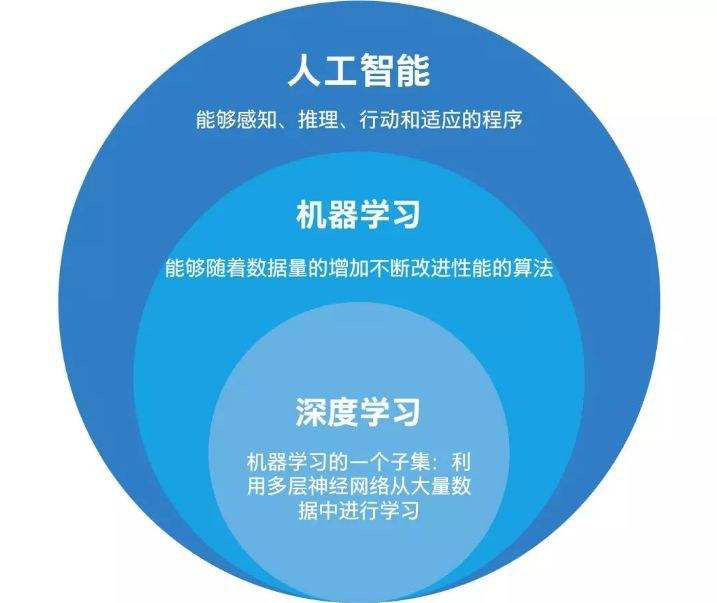
1、人工智能是是一部机器像人一样感知、认知、决策、执行的人工程序或系统。
2、人工智能,机器学习,深度学习三者的关系。
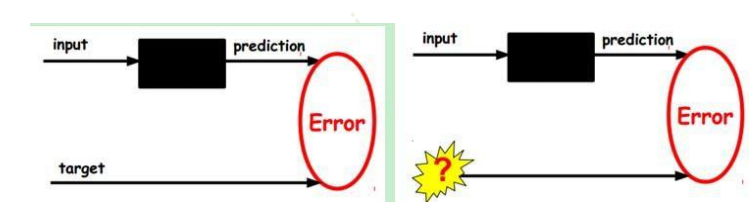
1、深度学习的不能
(1)算法不稳定,容易被“攻击”。(2)模型复杂度高,不容易纠错。(3)端到端训练方式对数据依赖性强,模型增量性差。(4)专注于直观感知类问题,对开放型推力问题无能为。
(5)人类知识无法有效引入监督,不可避免的存在偏见与歧视。
2、通过举了一个非常有趣的“狗屎检测”的例子来比较了传统机器学习与深度学习的处理过程,深度学习要效率的多。
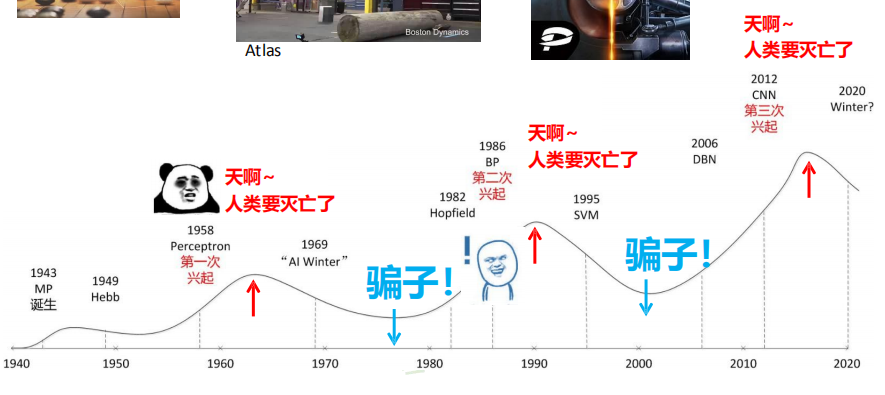
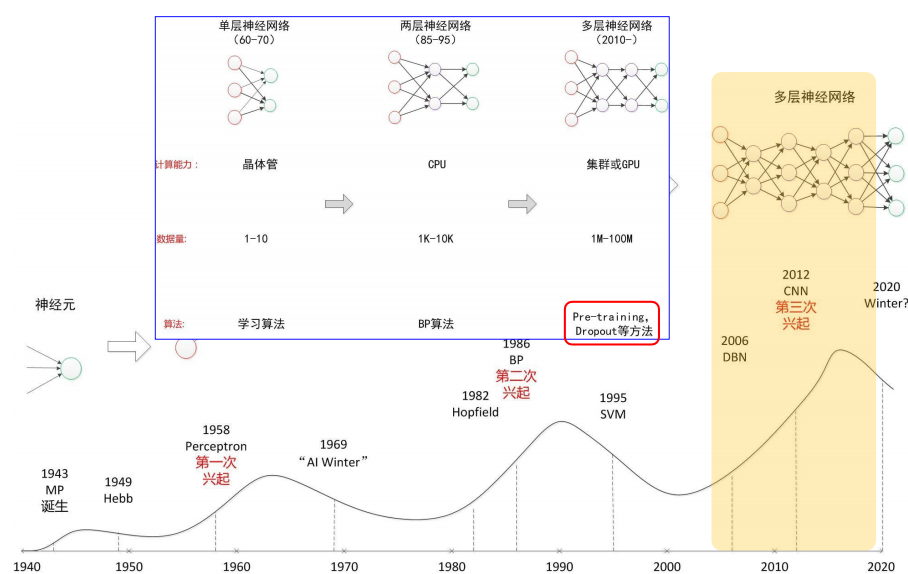
3、一切的开始是感知器的提出。感知器是由 Rosenblatt于1957年提出。但是Rosenblatt认为感知器将无所不能,而Minsky则认为感知器的应用是有限的。
4、单层感知器神经网络无法解决不可线性划分的问题,如异或门。
5、辛顿与David Rumelhard合作发表论文,阐述了BP算法及应用:
(1)BP算法通过在神经网络里增加了一个所谓的隐层,解决了异或问题
(2)使用BP算法的神经网络在做如形状识别之类的简单工作时,效率比感知器大大提高。
从此神经网络开始复苏。
6、Yann lecun使用了“卷积神经网络”的技术。
7、辛顿将“神经网络”改名为“深度学习”。
8、吴恩达等:使用GPU的运算速度和传统双核CPU相比,最快时要快近70倍。
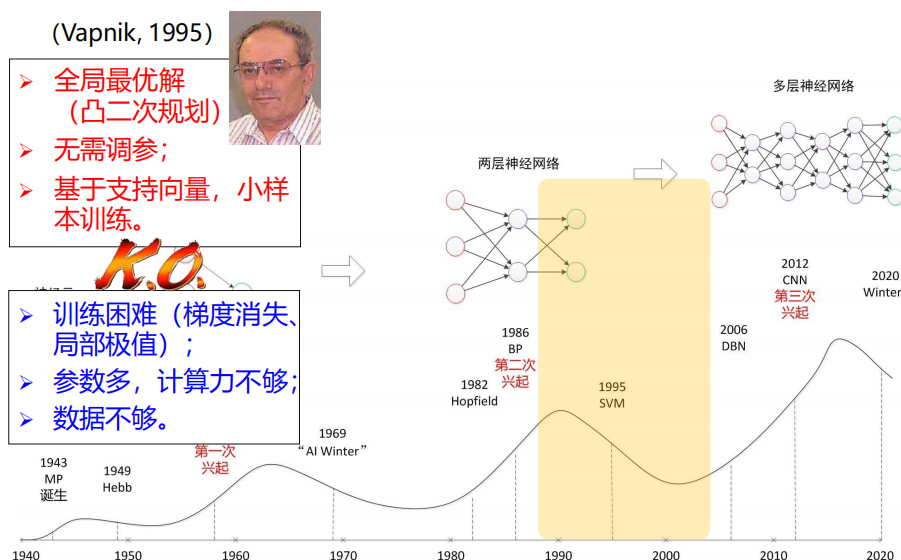
9、SVM:是一类按监督学习方式对数据进行二元分类的广义线性分类器,其决策边界是对学习样本求解的最大边距超平面。
10、Bengio等使用RELU激励函数,对于特定的输入,统计上有一半神经元是没有反应的,保持沉默。RELU函数和别的激励函数模型相比,识别错误率更低,而且其有效性,对于神经网络是否进行“预先训练”过并不敏感。
11、神经网络的三起三落。
14、
1.2
1、
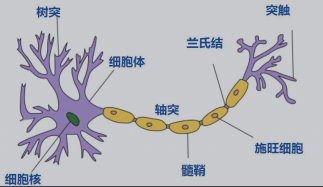
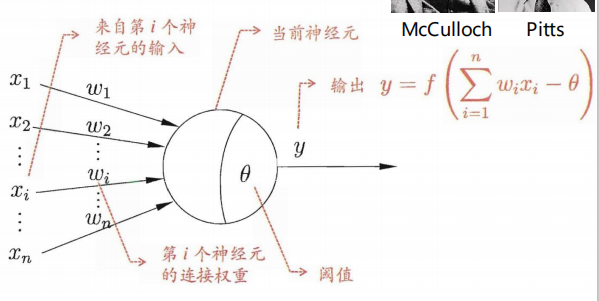
生物神经元 M-P神经元
|
生物神经元 |
M-P神经元 |
|
多输入单输出 |
多输入信号进行累加∑ixi |
|
空间整合 |
多输入信号进行累加∑ixi |
|
兴奋性/抑制性输入 |
权值wi正负模拟兴奋\抑制,大小模拟强度 |
|
阈值特性 |
输入和超过阈值θ,神经元被激活 |
2、激活函数f:神经元继续传递信息,产生新连接的概率(超过阈值被激活,但不一定传递)
3、激活函数举例:
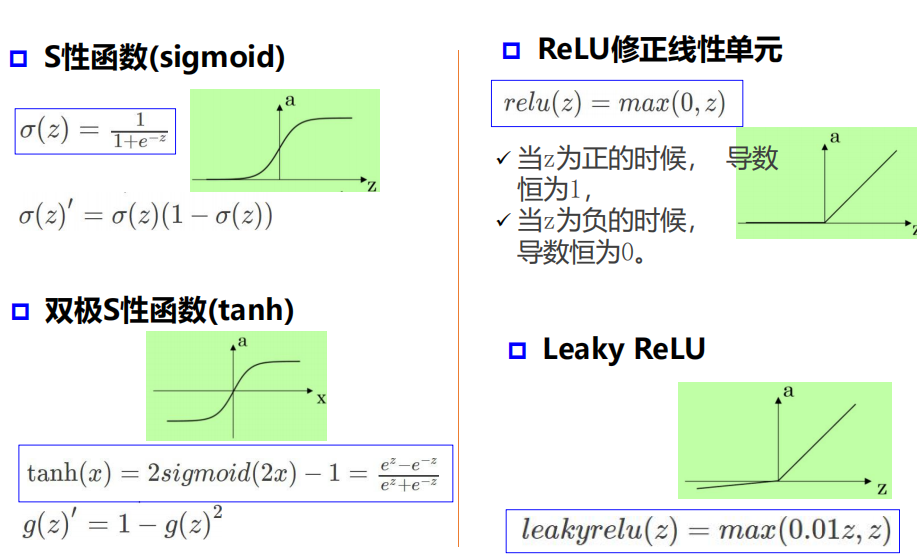
注:二分类一般采用sigmoid函数。
4、单层感知器是首个可以学习的人工神经网络。
5、单层感知器:非线性激活函数 0 和 1 与或非。
6、多层感知器:三层感知器实现同或。
7、神经网络每一层的作用
每一层数学公式y⃗ =a(W⋅x⃗ +b)
完成输入->输出空间变换
作用 公式参数
升/降维 W·x
放大/缩小 W·x
旋转 W·x
平移 +b
弯曲 a(·)
神经网络学习如何利用矩阵的线性变换加激活函数的非线性变换,将原始输入空间投影到线性可分的空间去分类/回归。
增节点数:增加维度,即增加线性转换能力
增加层数:增加激活函数的次数即增加非线性转换次数
8、更深的网络
在神经元总数相当的情况下,增加网络深度可以比增加宽度带来更强的网络表示能力,产生更多的线性区域。
深度和宽度对函数复杂度的贡献是不同的,深度的共享是指数增长的,而宽度的贡献是线性的。
9、梯度:
多元函数f(x,y)在每个点有多个方向,每个方向都可以计算导数,称为方向导数。
梯度是一个向量:
方向是最大方向导数的方向
模为方向导数的最大值
10、无约束优化:梯度下降
参数沿负梯度方向更新可以使函数值下降。
11、深层神经网络的问题:梯度消失
增加深度会造成梯度消失,误差无法传播,同时多层网络容易陷入局部极值,难以训练。
三层神经网络是主流。
12、深度学习使用两个优化器:Adam和SGD
一般来说Adam效果较好。
13、神经网络的第二次落
14、神经网络的第三次起
15、自编码器
(1)自编码器假设 输出与输入相同,是一种尽可能复现输入信号的神经网络。
将input输入一个encoder编码器,就会得到一个code;加一个decoder解码器输出信息。
通过调整encoder和decoder的参数,使得重构误差最小
没有额外监督信息,无标签数据,误差的来源是直接重构后的信号与原输入相比得到。
(2)自编码器一般是个多层神经网络,最简单是三层:输入层,隐层,输出层。
(1)最初被提出用来降维。
16、堆叠自编码器
将多个自编码器得到的隐层串联
所有顶层预训练完成后,进行基于监督学习的全网络微调
17、解决梯度消失
(1)Layer-wise Pre-train: 2006年Hinton等提出的训练深度网路的方法,用无监督数据作分层预训练,再用有监督数据fine-tume
(2)ReLU:新的激活函数解析性质更好,克服了sigmoid函数和tanh函数的梯度消失问题
(3)辅助损失函数: e.g. GoogLeNet中的两个辅助损失函数,对浅层神经元直接传递梯度
(4)Batch Normalization: 逐层的尺度归一
2、代码练习
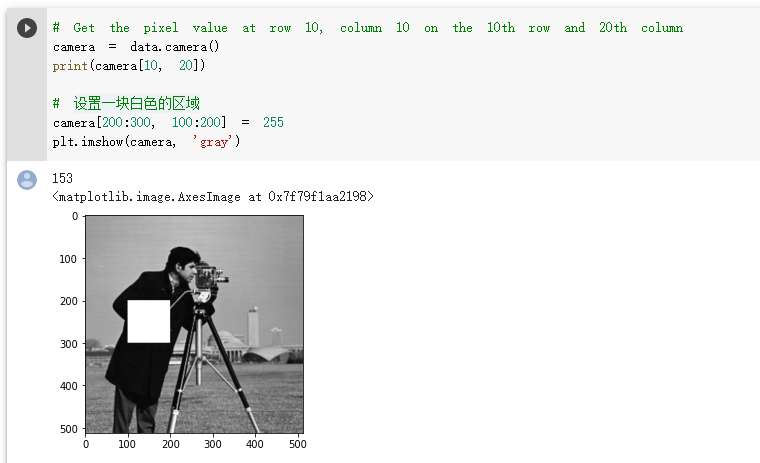
2.1图像处理
设置一块白色的区域
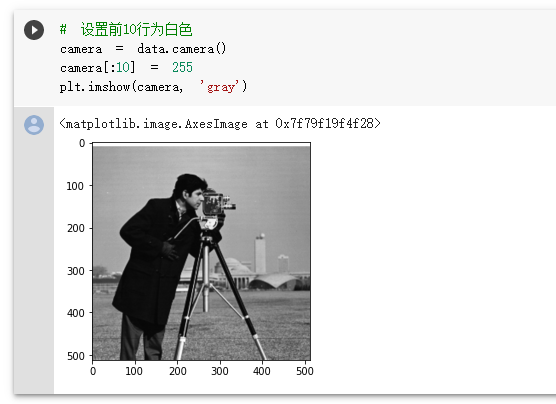
设置前10行为白色
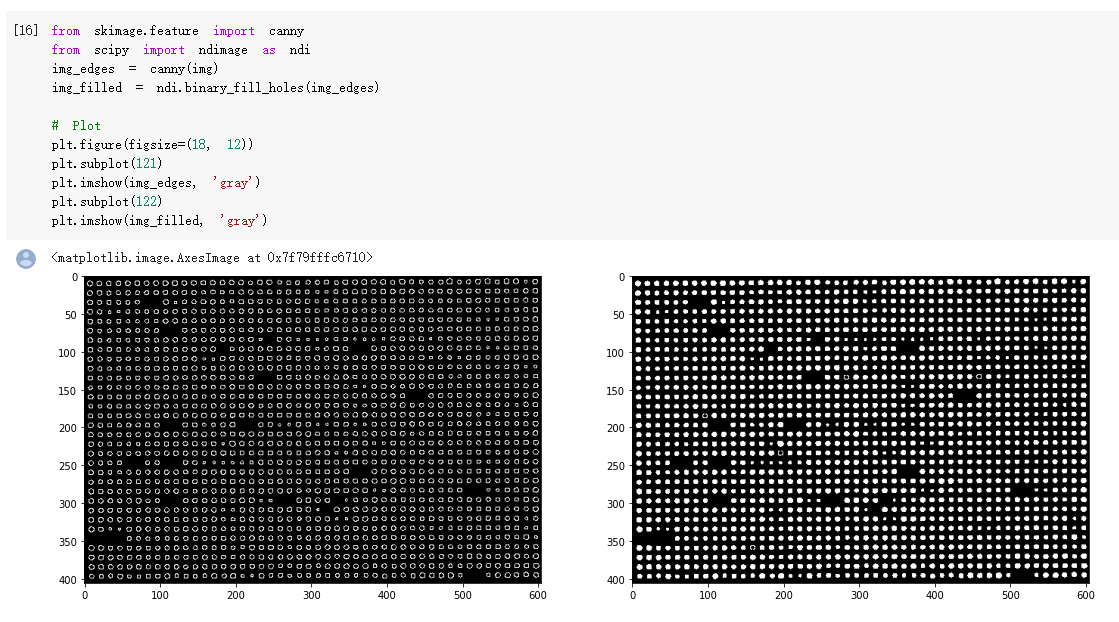
Canny算子用于边缘检测
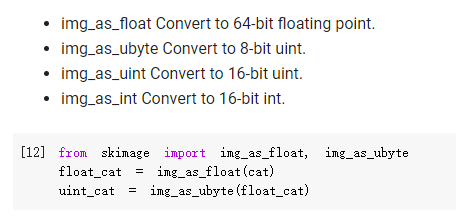
转换图像数据类型
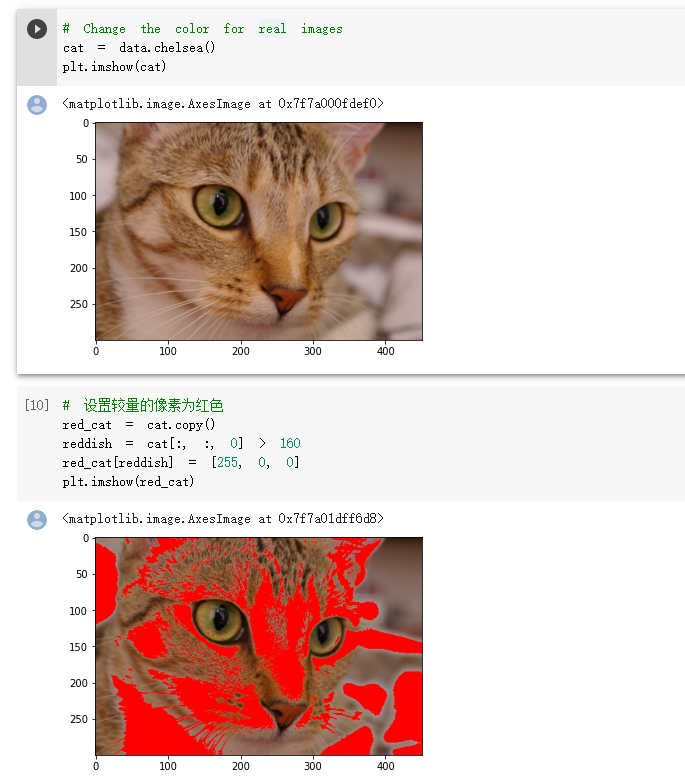
设置较亮的像素为红色
2.2 PyTorch基础
什么是 PyTorch ?
在第三个学习视频中老师也提到过:
PyTorch是一个python库,它主要提供了两个高级功能:1、GPU加速的张量计算
2、构建在反向自动求导系统上的深度神经网络
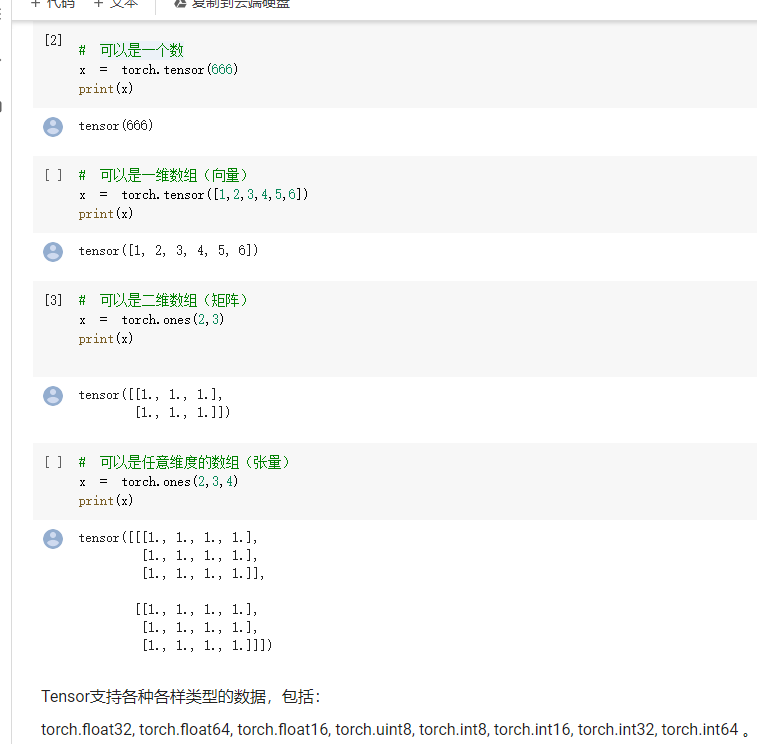
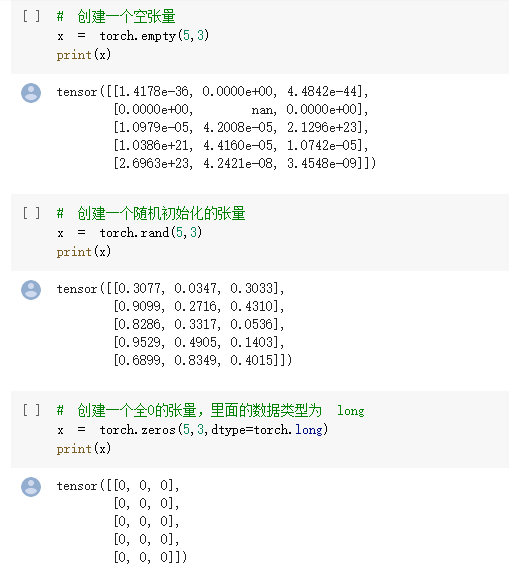
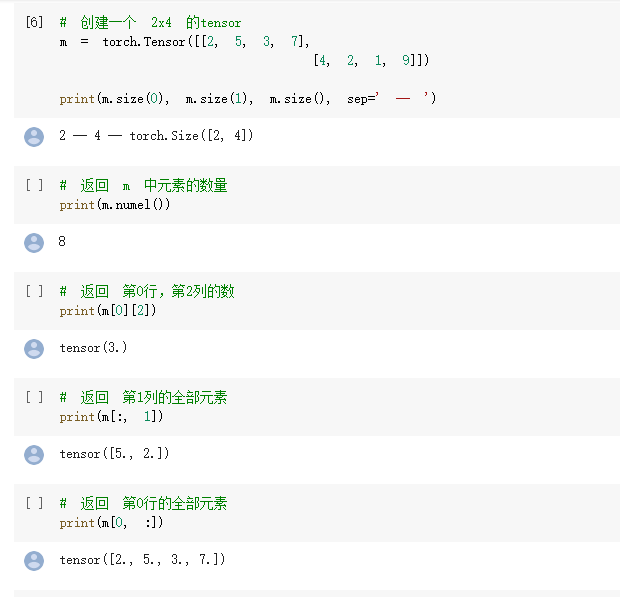
一般定义数据使用torch.Tensor , tensor的意思是张量,是各种数据的总称
定义数据:张量类 torch.Tensor 任意类型的数据
定义数据操作:函数类 torch.autograd.Function
凡是用torch进行的操作都是Function:基本运算、布尔运算、线性运算等。
Tensor三个重要组成:data(存数据)、grad(存梯度)、grad_fn(用来指向创造自己的Function)
PyTorch里没有一个显式的graph的定义,计算步骤,存在Tensor的grad_fn里沿着Tensor的grad_fn往后走,就是反向传播
2.3 螺旋数据分类
#数据初始化
import random
import torch
from torch import nn, optim
import math
from IPython import display
from plot_lib import plot_data, plot_model, set_default
# 因为colab是支持GPU的,torch 将在 GPU 上运行
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# 初始化随机数种子。神经网络的参数都是随机初始化的,# 不同的初始化参数往往会导致不同的结果,当得到比较好的结果时我们通常希望这个结果是可以复现的,# 因此,在pytorch中,通过设置随机数种子也可以达到这个目的
seed = 12345
random.seed(seed)
torch.manual_seed(seed)
N = 1000 # 每类样本的数量
D = 2 # 每个样本的特征维度
C = 3 # 样本的类别
H = 100 # 神经网络里隐层单元的数量
X = torch.zeros(N * C, D).to(device)
Y = torch.zeros(N * C, dtype=torch.long).to(device)
for c in range(C):
index = 0
t = torch.linspace(0, 1, N) # 在[0,1]间均匀的取10000个数,赋给t
# 下面的代码不用理解太多,总之是根据公式计算出三类样本(可以构成螺旋形)
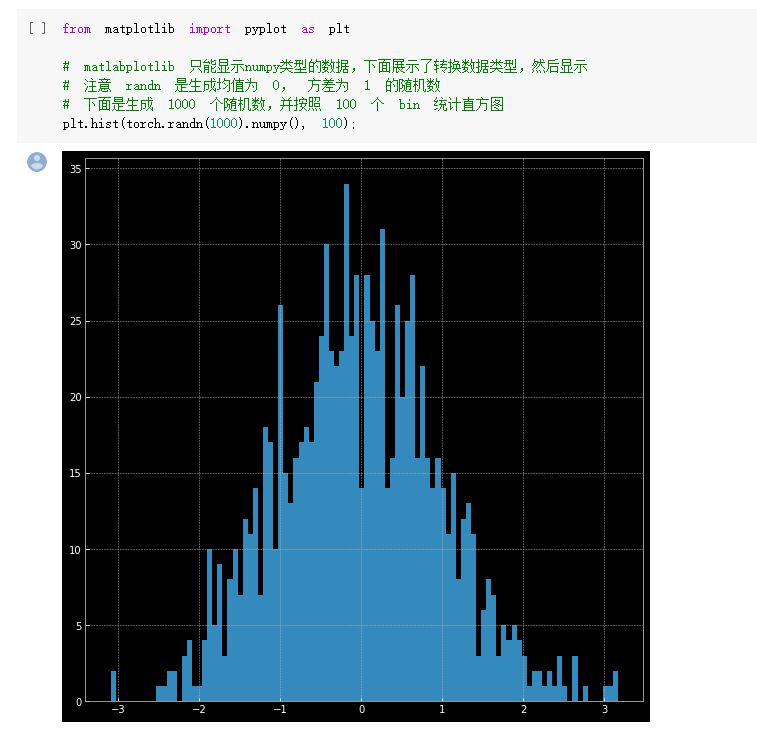
# torch.randn(N) 是得到 N 个均值为0,方差为 1 的一组随机数,注意要和 rand 区分开
inner_var = torch.linspace( (2*math.pi/C)*c, (2*math.pi/C)*(2+c), N) + torch.randn(N) * 0.2
# 每个样本的(x,y)坐标都保存在 X 里
# Y 里存储的是样本的类别,分别为 [0, 1, 2]
for ix in range(N * c, N * (c + 1)):
X[ix] = t[index] * torch.FloatTensor((math.sin(inner_var[index]), math.cos(inner_var[index])))
Y[ix] = c
index += 1
#创建线性模型
learning_rate = 1e-3
lambda_l2 = 1e-5
# nn 包用来创建线性模型# 每一个线性模型都包含 weight 和 bias
model = nn.Sequential(
nn.Linear(D, H),
nn.Linear(H, C)
)
model.to(device) # 把模型放到GPU上
# nn 包含多种不同的损失函数,这里使用的是交叉熵(cross entropy loss)损失函数
criterion = torch.nn.CrossEntropyLoss()
# 这里使用 optim 包进行随机梯度下降(stochastic gradient descent)优化
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, weight_decay=lambda_l2)
# 开始训练
for t in range(1000):
# 把数据输入模型,得到预测结果
y_pred = model(X)
# 计算损失和准确率
loss = criterion(y_pred, Y)
score, predicted = torch.max(y_pred, 1)
acc = (Y == predicted).sum().float() / len(Y)
print('[EPOCH]: %i, [LOSS]: %.6f, [ACCURACY]: %.3f' % (t, loss.item(), acc))
display.clear_output(wait=True)
# 反向传播前把梯度置 0
optimizer.zero_grad()
# 反向传播优化
loss.backward()
# 更新全部参数
optimizer.step()
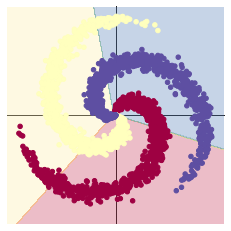
#效果图如下
#加入ReLU激活函数
learning_rate = 1e-3
lambda_l2 = 1e-5
# 这里可以看到,和上面模型不同的是,在两层之间加入了一个 ReLU 激活函数
model = nn.Sequential(
nn.Linear(D, H),
nn.ReLU(),
nn.Linear(H, C)
)
model.to(device)
# 下面的代码和之前是完全一样的,这里不过多叙述
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate, weight_decay=lambda_l2) # built-in L2
# 训练模型,和之前的代码是完全一样的
for t in range(1000):
y_pred = model(X)
loss = criterion(y_pred, Y)
score, predicted = torch.max(y_pred, 1)
acc = ((Y == predicted).sum().float() / len(Y))
print("[EPOCH]: %i, [LOSS]: %.6f, [ACCURACY]: %.3f" % (t, loss.item(), acc))
display.clear_output(wait=True)
optimizer.zero_grad()
loss.backward()
optimizer.step()
#效果图如下
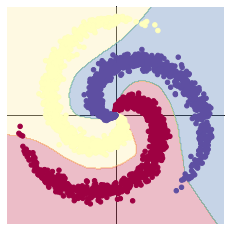
加入ReLU激活函数后,明显比之前分类清晰了许多,使神经网络具备了分层的非线性映射学习能力。
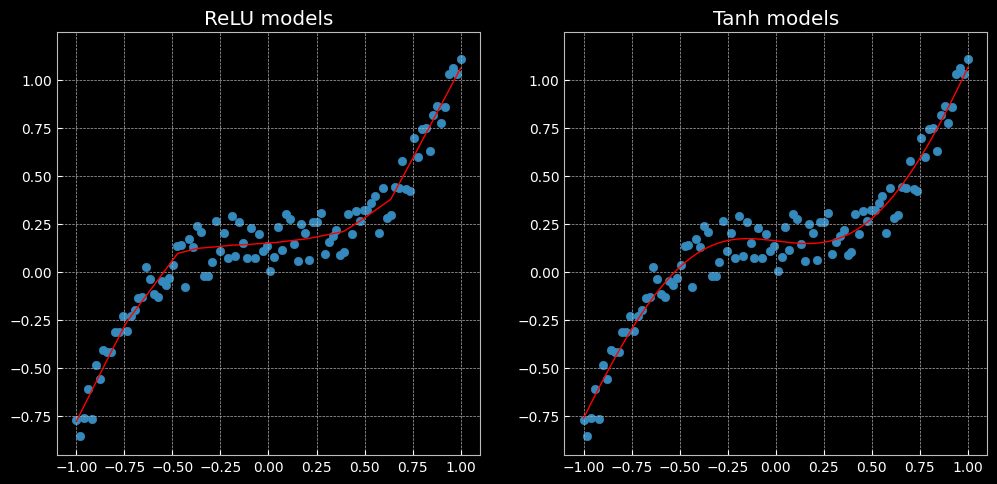
2.4 回归分析
总结:这是以一次接触深度学习,比较吃累,对一切比较陌生,入门较困难,需要再多花时间慢慢的去消化,多向优秀的同学学习。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号