
基于STM32与FreeRTOS的高响应双通道点光源追踪系统:从硬件设计到闭环控制
在嵌入式系统与自动控制领域,实现快速、精准的目标追踪是一个经典而富有挑战性的课题。本文将深入剖析一个基于STM32F411微控制器和FreeRTOS实时操作系统的双通道点光源追踪系统。该系统不仅是一个优秀的嵌入式学习项目,更体现了高响应速度、低延迟闭环控制和软硬件协同设计的核心思想。我们将从系统架构、硬件设计考量、核心算法到实际调试经验,全方位解读如何构建一个稳定可靠的自动追踪系统。
一、 系统架构概览:实时操作系统下的分层设计
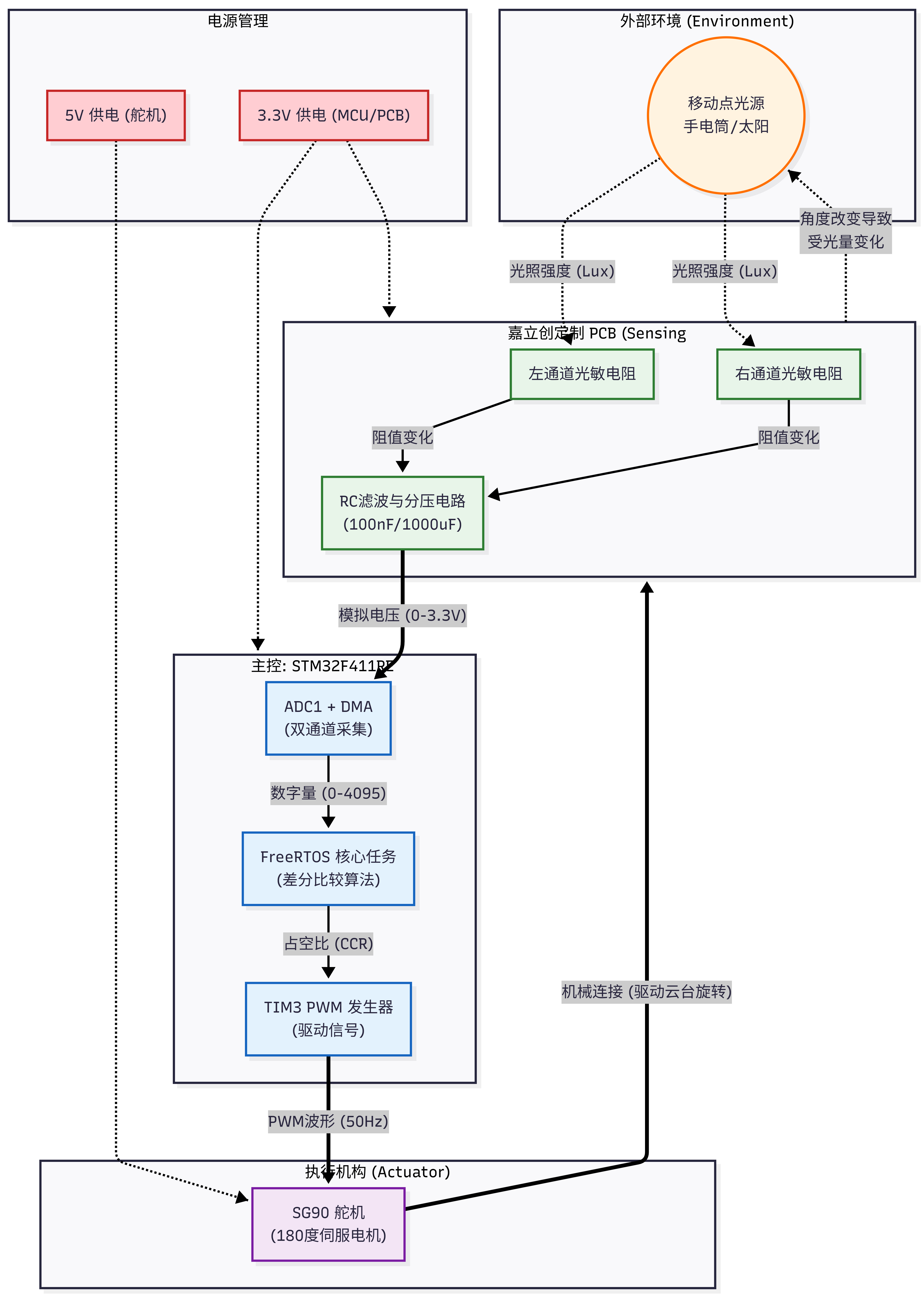
本系统采用清晰的分层架构,在FreeRTOS的调度下协同工作,确保了任务的实时性与可靠性。整个系统可以划分为感知层、控制层和执行层。
- 感知层:核心是双路光敏传感器。利用STM32F411的ADC模块,通过多通道分时复用、TIM2定时器触发(频率高达100kHz)结合DMA(直接存储器访问)技术,实现了对两路传感器信号的高频、低延迟同步采集。这为后续的精确控制提供了高质量的数据基础。
- 控制层:运行在FreeRTOS任务中。核心算法实时计算两路电压的差分值作为误差信号,并通过一个带死区的比例控制算法,动态计算出驱动舵机所需的PWM信号。该层是系统的“大脑”,决定了追踪的敏捷度和稳定性。
- 执行层:由SG90舵机构成。接收来自TIM3生成的PWM控制信号,带动装有传感器的检测板进行姿态调整,从而构成一个完整的闭环反馈系统。
这种基于实时操作系统的设计,为未来功能扩展(如添加OLED显示、三维追踪等)提供了清晰的框架[AFFILIATE_SLOT_1]。系统整体设计框图如下:
二、 硬件设计精要:为稳定与精准而生
优秀的硬件设计是系统稳定运行的基石。本项目采用自定义PCB设计,每一处细节都蕴含了对噪声抑制、信号完整性和机械精度的考量。
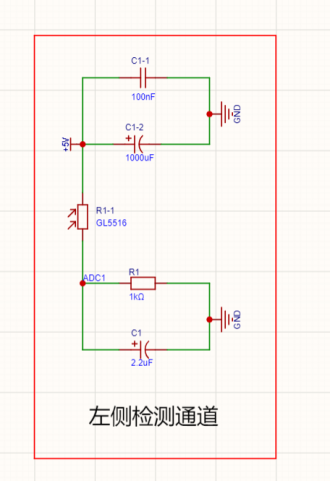
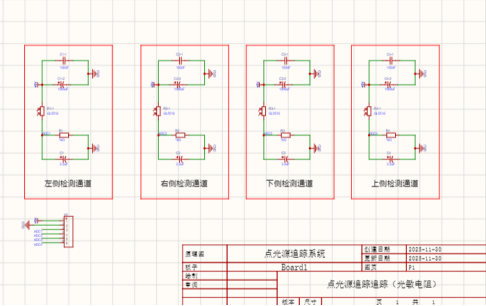
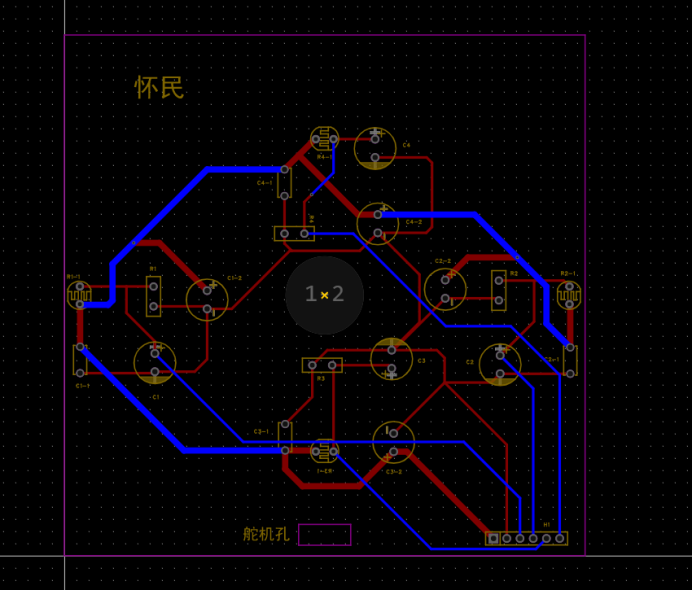
原理图与PCB展示:
关键的硬件设计细节包括:
- 电源去耦与储能:输入端并联1000uF电解电容和100nF陶瓷电容。大电容应对舵机启动时的瞬时大电流,防止电压跌落导致MCU复位;小电容必须紧靠MCU电源引脚放置,为高频噪声提供低阻抗泄放路径。
- 传感器对称布局:两个光敏电阻严格对称放置,确保物理基准一致,这是差分算法能够准确工作的前提,避免了固有的静态误差。
- 接地与屏蔽:采用双面铺铜接地。大面积地平面能极大降低地线阻抗,抑制因舵机大电流工作引起的“地弹”现象,保证ADC参考地的纯净,从而获得稳定的采样数据。
- 分层布局优化:传感器单独置于顶层,其他元件置于底层。这有效避免了元件阴影对光路的干扰,为提升追踪灵敏度创造了条件。
三、 核心追踪原理:差分感知与闭环控制
系统的“智能”源于一个简单而有效的物理原理和闭环控制模型。
1. 物理感知与差分逻辑:光敏电阻的阻值随光照强度变化,通过分压电路转换为电压信号。系统核心在于差分比较:实时计算左、右两路传感器的电压差 ΔV = V_left - V_right。
- 当光源正对检测板中心时,ΔV ≈ 0。
- 当光源偏移,两侧光照不均,ΔV 产生非零值,其极性指示偏移方向,大小反映偏移程度。
2. 闭环控制流程:这个电压差 ΔV 被作为控制系统的误差输入。控制算法根据 ΔV 计算出相应的舵机调整指令(PWM占空比),驱动舵机转动,改变检测板角度,从而减小 ΔV,直至重新归零,完成一次闭环调节。整个过程持续进行,实现动态追踪。
项目实际追踪效果演示:
四、 软件设计与核心代码解析
软件是硬件能力的调度者。系统软件基于FreeRTOS,主要任务逻辑如下图所示:
关键代码模块与解析:
1. 舵机PWM驱动基础:SG90舵机要求严格的50Hz(周期20ms)PWM信号。脉宽在0.5ms到2.5ms之间线性对应0-180度转角。通过配置TIM3的预分频器和自动重装载值(ARR)来生成标准周期。
舵机左右转动的基础控制代码如下:
void MotorTurnRight(uint16_t step)//应该 加
{
if(pulsewide <= 500 - step)
{
pulsewide += step;
}
else
{
pulsewide = 500; // 到达右极限
}
//******************************************************重置占空比
//__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,pulsewide); 不需要这个,因为我已经在定时器设置的地方把那个常量改成pulsewide了
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, pulsewide);
/*MX_TIM3_Init();
HAL_TIM_Base_Start(&htim3);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);*/
}
void MotorTurnLeft(uint16_t step)//应该减
{
// 逻辑:左转需要减小 pulsewide
// 边界检查:当前值是否比 (最小值 + 步长) 大
// 如果是,可以安全减去 step;否则直接设为最小值,防止越界
if(pulsewide >= 300 + step)
{
pulsewide -= step;
}
else
{
pulsewide = 300; // 到达左极限
}
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, pulsewide);
/*
MX_TIM3_Init() 会重新配置定时器硬件、重置计数器,这会导致 PWM 波形中断、频率重置,舵机会剧烈抽搐甚至不动作。
正确的做法: 只需要修改定时器的**比较寄存器(CCR)**的值即可。
MX_TIM3_Init();
HAL_TIM_Base_Start(&htim3);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);*/
}2. 高精度电压采集:利用ADC的12位分辨率(0-4095)对应0-3.3V的参考电压。通过DMA搬运取平均后的ADC值,并转换为实际电压值,代码如下:
float Get_Channel1_ADC_Value()
{
flag=0;
//开启时钟tim2 和adc采样
HAL_TIM_Base_Start(&htim2);
HAL_ADC_Start_DMA(&hadc1,ADC_V,200);
while(flag==0)
{
osDelay(1);
}
ADC_1_ave=0;
ADC_2_ave=0;
for(int i=0;i<100;i++)
{
ADC_1_ave=(ADC_V[i*2]+ADC_1_ave);
ADC_2_ave=(ADC_V[i*2+1]+ADC_2_ave);
}
ADC_1_ave=ADC_1_ave/100;
ADC_2_ave=ADC_2_ave/100;
// HAL_ADC_Stop(&hadc1);
return ((float)ADC_1_ave*3.3f/4095.0f);
}
float Get_Channel2_ADC_Value()
{
return ((float)ADC_2_ave*3.3f/4095.0f);
}公式 (float)ADC_1_ave*3.3f/4095.0f 完成了从数字量到模拟电压的线性映射。使用float类型和f后缀能充分利用STM32F4的FPU进行硬件浮点加速。
3. 核心控制算法——带死区的比例控制器:这是避免系统“帕金森式”抖动的关键。核心控制逻辑代码如下:
if (fabs(delta_v_currtnt) > 0.01)
{
// 动态计算步长:电压差越大,转得越快
// 限制步长最大值,防止一次转动过大导致超调
step_temp = (uint16_t)(fabs(delta_v_currtnt) * 200);
if(step_temp > 50) step_temp = 50; // 增加一个限幅保护
if(step_temp < 1) step_temp = 1; // 保证至少动一下
// 判断方向
if (delta_v_currtnt > 0)
{
// 如果通道2电压 > 通道1电压,往左转(假设逻辑)
// 具体方向如果反了,把Left改成Right即可
MotorTurnLeft(step_temp);
printf("Turning Left, Step: %d\n", step_temp);
}
else
{
MotorTurnRight(step_temp);
printf("Turning Right, Step: %d\n", step_temp);
}
}算法精妙之处:
- ⚠️ 死区设置:只有当电压差绝对值大于0.01V时才进行调节。这个“死区”有效滤除了ADC的采样底噪,避免了舵机无意义的微小抖动,节省能耗并保护机械结构。
- ⚙️ 比例系数:代码中的
200是一个经验性的比例系数(Kp)。它决定了系统对误差的反应速度。步长 = ΔV * 200。系数太小则追踪迟钝,太大则易产生超调和振荡,需要仔细调试以取得平衡。
系统中控任务的核心循环代码如下,它整合了采集、计算和控制流程:
void StartCoreTask(void *argument)
{
/* USER CODE BEGIN StartCoreTask */
/* Infinite loop */
for(;;)
{
adc_chanel1_current=Get_Channel1_ADC_Value();//采样第1通道电压
adc_chanel2_current=Get_Channel2_ADC_Value();//采样第2通道电压
delta_v_currtnt=adc_chanel2_current-adc_chanel1_current;
printf("adc_chanel1_current: %.3f \n",adc_chanel1_current); //传回第1通道电压
printf("adc_chanel2_current: %.3f \n",adc_chanel2_current); //传回第2通道电压
printf("delta_v: %.3f \n",delta_v_currtnt); //电压差目前
//*********************************************动态循环**********************************************************
if (fabs(delta_v_currtnt) > 0.01)
{
// 动态计算步长:电压差越大,转得越快
// 限制步长最大值,防止一次转动过大导致超调
step_temp = (uint16_t)(fabs(delta_v_currtnt) * 200);
if(step_temp > 50) step_temp = 50; // 增加一个限幅保护
if(step_temp < 1) step_temp = 1; // 保证至少动一下
// 判断方向
if (delta_v_currtnt > 0)
{
// 如果通道2电压 > 通道1电压,往左转(假设逻辑)
// 具体方向如果反了,把Left改成Right即可
MotorTurnLeft(step_temp);
printf("Turning Left, Step: %d\n", step_temp);
}
else
{
MotorTurnRight(step_temp);
printf("Turning Right, Step: %d\n", step_temp);
}
}
osDelay(20); // 给控制循环一个时间间隔,不要太快,伺服电机响应需要时间
}
/* USER CODE END StartCoreTask */
}五、 实战踩坑与系统优化经验
从理论到稳定运行,中间充满了需要警惕的“坑”。
- ✅ 理解“中点”与“平衡点”:舵机的机械中点(PWM对应1.5ms)是固定的,而系统寻找的光照平衡点(ΔV=0)是动态的、随光源位置变化的。控制目标是抵达后者,而非盲目回中。
- ⚠️ 避免舵机抖动:切忌在控制循环中重复初始化定时器(如调用
HAL_TIM_PWM_Init),这会导致PWM输出中断。初始化应只进行一次,循环内仅通过修改CCR寄存器值来调整脉宽。 - 舵机安全保护:必须对计算出的PWM脉宽值(CCR)进行限幅钳位,确保其始终在舵机物理角度允许的范围内(如CCR在100到500之间)。防止堵转损坏舵机或MCU。
- 确保PWM信号输出:配置完成后,务必调用
HAL_TIM_PWM_Start()来启动PWM信号输出,这是一个容易被忽略但至关重要的步骤。
六、 总结与展望
本项目成功构建了一个响应迅速、运行稳定的双通道点光源自动追踪系统。其价值不仅在于最终功能,更在于贯穿始终的设计方法论:通过高频率低延迟的同步采集确保感知实时性;利用差分算法提取精准误差信号;采用带死区的比例控制实现快速而平稳的闭环调节;并通过严谨的硬件设计为整个系统提供稳定可靠的物理基础。
此系统为一个优秀的嵌入式控制教学范例,其架构具备良好的可扩展性。基于FreeRTOS,可以轻松添加更多任务,例如引入OLED显示实时状态,或者扩展为双轴(俯仰+偏航)系统,实现真正的三维空间光源追踪[AFFILIATE_SLOT_2]。希望本文的详细解析能为嵌入式开发者和自动控制爱好者提供有价值的参考。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号