
ApolloScape:百度开源自动驾驶数据集,如何重塑2D/3D场景理解?
在自动驾驶技术飞速发展的今天,高质量、大规模的数据集是算法研发与模型评估的基石。百度研究院推出的ApolloScape数据集,以其前所未有的规模、精细的标注和丰富的3D信息,正成为推动自动驾驶感知技术前进的关键力量。本文将深入解析这一数据集的核心特性、技术细节及其对行业的影响。
一、引言:自动驾驶感知的“数据燃料”危机
场景解析,即对图像中每个像素进行语义分类,是实现自动驾驶环境感知的核心技术。然而,其发展长期受限于高质量标注数据的匮乏。像素级标注成本高昂,导致早期数据集如CamVid、KITTI等规模有限,或在复杂性和3D信息上有所欠缺。Cityscapes虽在2D语义分割上有所建树,但3D信息不足。面对真实世界中复杂的交通场景、多样的光照和天气条件,业界亟需一个更全面、更庞大的基准数据集。ApolloScape的诞生,正是为了填补这一空白,为自动驾驶的2D/3D场景理解、定位、仿真等任务提供强大的“数据燃料”。
二、ApolloScape的核心优势:规模、复杂性与三维精度
ApolloScape并非对现有数据集的简单扩充,它在多个维度上设立了新的标杆:
- 空前规模:初始版本即包含超过14万张带有像素级语义标注的高分辨率图像,并计划最终扩展至百万级,远超同类数据集。
- 极致复杂性:数据采集于真实多样的交通场景,单张图像中动态物体(车辆、行人)数量可达数十至上百个,涵盖了从简单到极端拥堵的各种路况,极大地考验算法的鲁棒性。
- 厘米级3D信息:这是ApolloScape的杀手锏。每帧图像都配有高精度位姿信息,静态背景点云具有毫米级相对精度,并提供了对应的深度图,构成了首个面向户外场景的像素级标注RGB-D视频数据集。
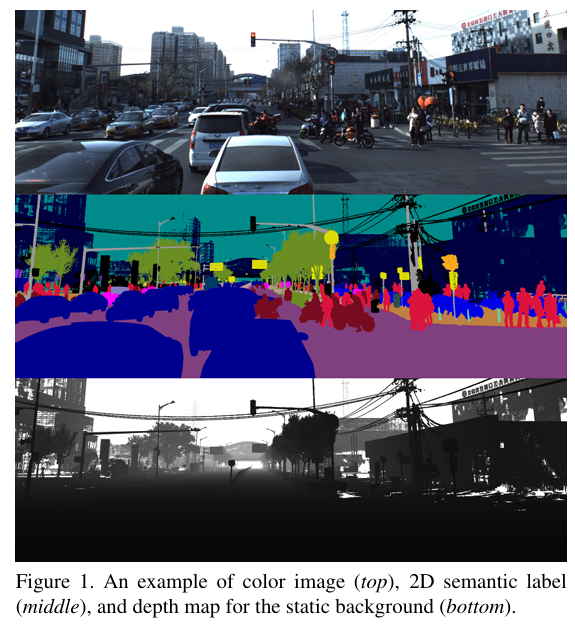
上图展示了数据集的典型样例:彩色图像、对应的2D语义标签以及静态背景的深度图,直观体现了其多模态数据的丰富性。
三、数据采集与标注:高效流程背后的技术栈
高质量数据源于专业的采集系统和高效的标注流水线。百度采用了Riegl VMX-1HA移动测绘系统,其核心包括:
- 高精度激光扫描仪:提供比Velodyne HDL-64E密度更高、精度更优(5mm/3mm)的点云数据。
- 多相机系统与组合导航:确保图像与空间信息的精确同步与定位。

面对海量数据标注的挑战,研究团队设计了一套创新的交互式2D/3D联合标注流程,核心思想是“从3D到2D”:
- 3D静态场景标注:首先在高质量点云上标注静态物体和背景。利用点云过分割和预训练的PointNet++模型进行辅助,再通过专用3D工具进行人工修正,显著提升效率。
- 2D标注自动化与优化:将3D标注投影至2D图像,自动生成静态部分的标签。对于动态物体,则先用CNN网络进行预分割,再通过2D标注工具精细调整边界。这套流程平均节省了70%的标注时间。
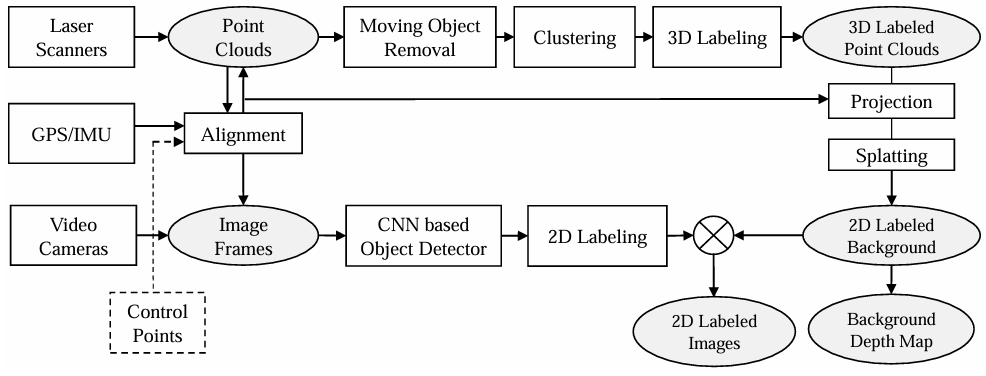
这种标注方式不仅高效,还保证了2D与3D标签在空间上的一致性,为多模态融合算法提供了完美的基础。对于后端架构师而言,这种将重型3D计算(点云处理)与灵活的2D修正相结合的服务端流程设计,极具借鉴意义。
四、数据集的独特规格与细粒度标注
ApolloScape在类别定义上既保持了与现有基准(如Cityscapes)的可比性,又加入了符合实际需求的创新:
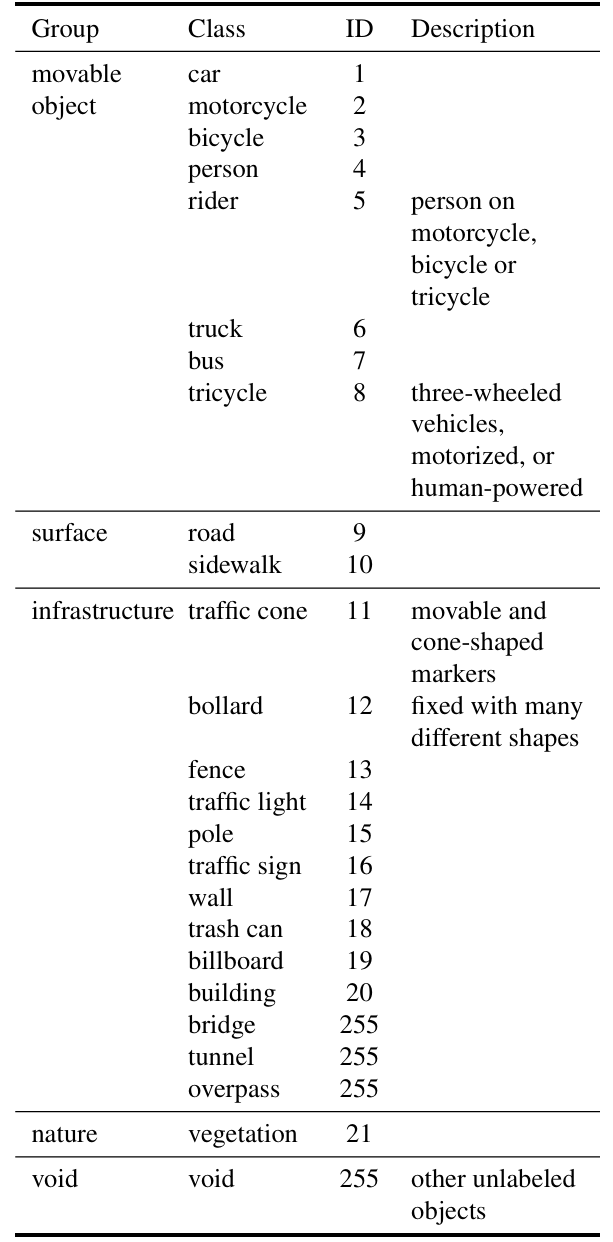
- 25类语义标签:涵盖车辆、行人、道路、建筑等。新增了“三轮车”这一在亚洲常见的类别,并将“骑行者”整体视为一个实例,更符合自动驾驶的感知逻辑。
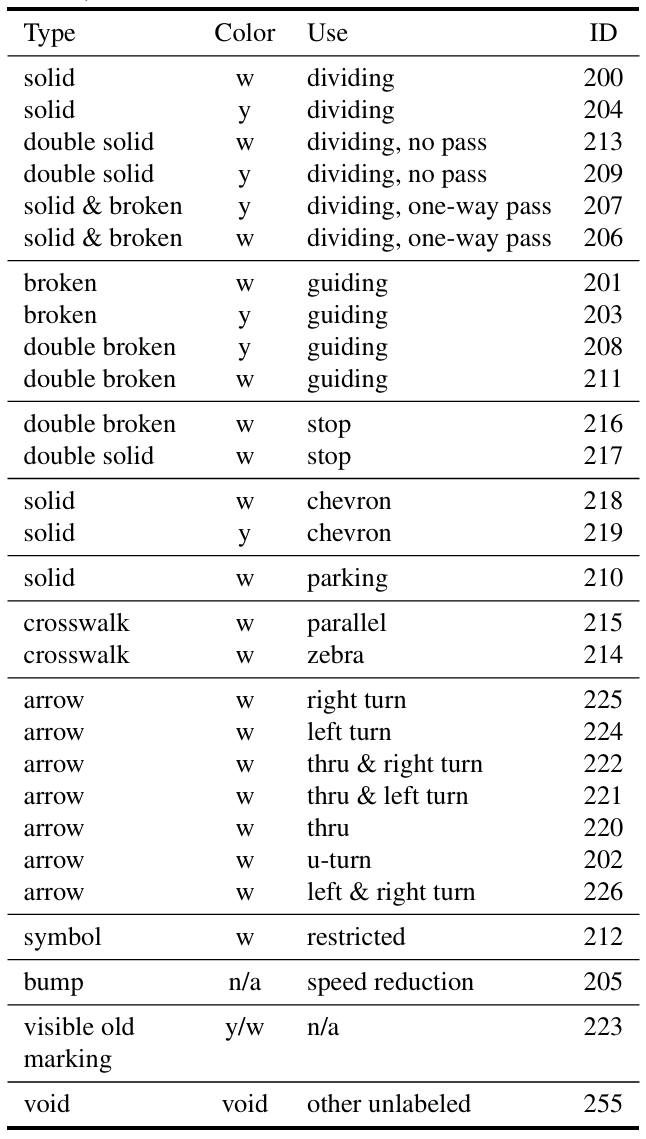
- 28类车道线标注:这是其另一大特色。根据颜色(白、黄)和线型(实线、虚线等)进行了细粒度划分,甚至包含了“可见的旧标记”(幽灵车道线),这对车道保持系统的训练至关重要。
- 实例级视频标注:超过8.9万个动态物体提供了实例级标注,支持视频目标分割、跟踪与轨迹预测等时序任务研究。
这些精细的标注使得ApolloScape不仅能用于传统的图像分割,更能支撑更高级的自动驾驶感知任务,例如高精地图的构建与更新、车辆行为预测等。开发者可以基于这些结构化的标注数据,构建更复杂的感知模型API和服务。
五、基准任务与评估:推动算法进步
数据集提供了完整的评估基准套件,主要聚焦于2D图像解析:
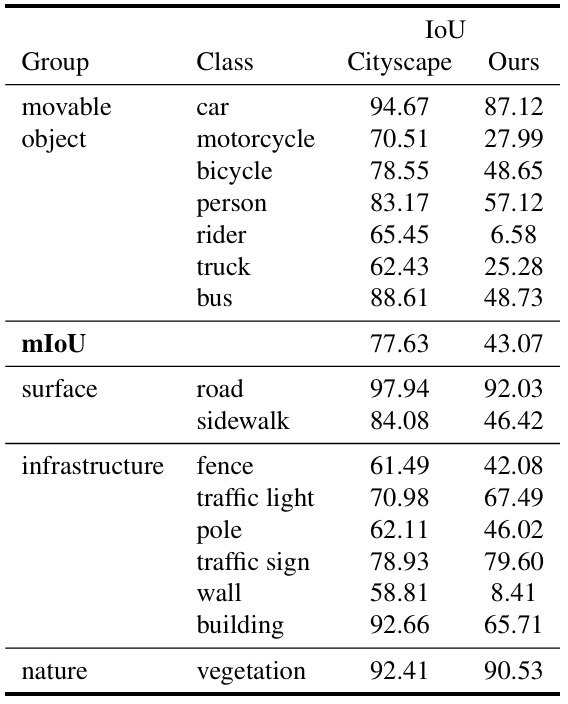
- 语义分割评估:采用标准的平均交并比(mIoU)作为评估指标。
- 实例分割评估:对于视频中的动态物体,采用插值平均精度(AP)进行评估。
初步实验表明,即使在相同的网络结构(如Wide ResNet-38)和相似的训练数据量下,模型在ApolloScape上取得的mIoU远低于在Cityscapes上的表现,尤其是动态物体类别差距明显。这恰恰证明了ApolloScape场景的复杂性和挑战性,将推动研究者开发更强大的模型。
六、挑战、应用与未来展望
ApolloScape也呈现了真实世界的诸多挑战,如图像中的极端光照对比、车辆表面的复杂反射等,这些都为算法研发提供了宝贵的“压力测试”场景。

其应用远不止于学术研究:
- 高精地图与定位:厘米级精度的点云和位姿信息可用于构建和验证高精地图,并服务于车辆定位。
- 驾驶仿真:丰富的标注数据是构建高逼真度仿真环境的基础。
- 模型迁移学习:可作为预训练的大规模源域数据集,提升小规模目标域数据的模型性能。
[AFFILIATE_SLOT_1]
未来,团队计划将数据集规模扩大至百万帧,并纳入更多恶劣天气(雨、雪、雾)数据。同时,将引入立体视觉和全景相机系统,以获取更完整的深度信息,特别是动态物体的深度,这将是自动驾驶感知领域的又一重大突破。对于整个自动驾驶技术栈而言,从感知、预测到规划,都需要强大的中间件和后端架构来高效处理像ApolloScape这样的海量多模态数据流。
七、总结:开启自动驾驶数据驱动的新篇章
总而言之,百度ApolloScape数据集通过其超大规模、高复杂度、丰富的3D与细粒度标注,为自动驾驶感知技术树立了新的研究和工程基准。它不仅仅是一个数据集,更是一个推动2D/3D场景理解、传感器融合、高精定位等多领域技术协同发展的平台。随着更多数据的开放和更复杂任务的引入,ApolloScape将持续为全球自动驾驶研发社区注入核心动力,加速全行业向安全、可靠的自动驾驶未来迈进。
[AFFILIATE_SLOT_2]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号