VSLAM笔记——2. 特征提取与匹配 — FAST和BRIEF
之前在对极几何里,我们说到,只要找到两个图像的八对对应点,就能从中恢复出相机的运动了(2D-2D的对极几何八点法),但是怎么找到两个对应点呢?其中一个思路就是特征点提取与匹配。
这其中有很多种提取和匹配的方法,这里先说说比较经典的FAST特征点和BRIEF描述子吧。
想象一下,给出两张图,我们人类很容易就能分辨出两张图里,哪些部分是同一个物体在不同视角下拍摄的,也能大概感觉出两张图像之前的运动关系,比如下面这两张图,我们很轻松的就能感觉到:右边的图,相比左边的图,视角更偏向右边一点。

可是计算机要如何分辨这种运动呢?在之前的内容里我们知道了可以通过2D-2D的对极几何,其实还有通过空间三维点和当前图片对应点来计算的PnP求解方法(3D-2D),或者通过两组对应的空间三维点来计算的ICP方法(3D-3D),然而这些方法都绕不开一个问题:如何判断两张图像上的对应点(想起PnP和ICP的坑还没填QAQ)。
1. 思想
如果想判断两张图像的对应点,首先要解决的就是我们怎么从图像中,找到这样的一个点。
比如两张图里有很多的猫(怎么又是猫),我们如何区分两张图里,哪些猫是同一只呢?
“可以通过花色,胖瘦,毛的长短呀!”
这就是一个很好的思路,对于图像也是,要判断两张图中的对应点,它们得有一些“信息”来帮助我们判断:
- 它需要是一个比较“特别”的点,如果图里的猫长得都一模一样我们就很难判断了
- 它要在两幅图像内都能被看到,并且不应该变形很多,如果猫在第二张图里跑掉了,甚至变色了(?),那我们也很难判断
- 要能区分出它与另一张图像的哪个点是对应的,即便这只猫在第一张图里很有特点,在第二张图里跑过来几只和它一样的猫,我们也很难判断
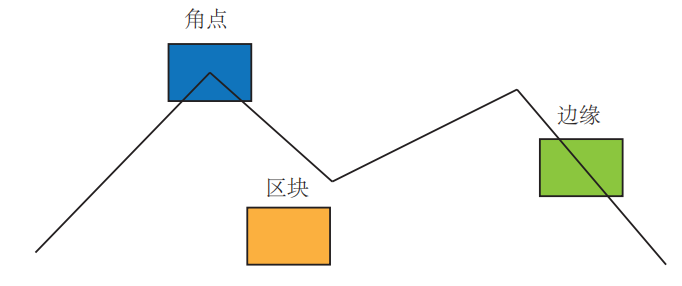
于是人们发现,角点似乎是一种很好的特征点,同一颜色区块内的点,由于长得都一样,不够有“特点”,无法判断。
边缘线上的点,虽然有些“特别”了,但是沿线所有的点和它都一样,也无法判断。
而角点,我们可以很容易的分辨出来。
所以我们要想一个办法,来检测出图像中的角点,然后再另一张图像中寻找与之匹配的对应点。
2.FAST特征点
FAST(Features from Accelerated Segment Test)就提供了这样一种判断角点的方法,比如这个窗子上的点,判断它是一个角点,应该满足这样的条件:
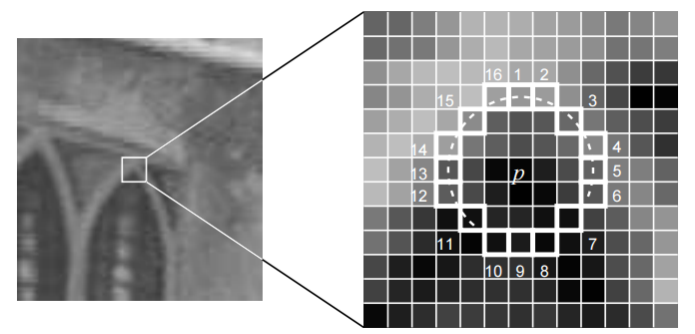
- 图像上某一个像素点p的亮度为Ip。
- 设置一个阈值T。
- 以p为圆心,选择半径为3的圆上的16个点。
- 如果这些点中有连续N个点的亮度>Ip+T,或<Ip-T,则认为p是一个角点。
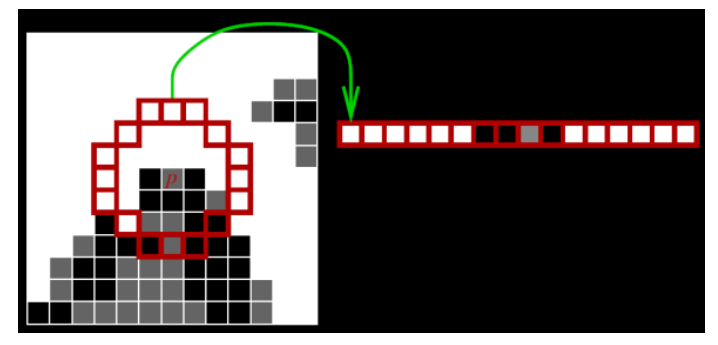
在实际算法里,我们可以先检测其中的第1、5、9、13点,如果它们之中有三个(FAST-12)同时满足条件,才可能是一个角点,这样就能排除很多非角点了。
另外比如上面的图中,p的左右,上下相邻的点实际上也满足FAST角点的条件,但是实际上这个地方我们只需要标记一个角点就可以了,这时候还需要使用非极大值抑制(NMS),选择出p附近(比如5x5的窗口内)所有被判定为角点的点中,响应值最大的点作为最终的结果。
响应值根据下面这个公式计算:
其中Ii是判定角点时的连续N个点的亮度值。也就是说,角点和周围点的亮度差距越大,它的响应值就越高。
3.BRIEF描述子
通过FAST,我们知道了怎么从图像中判断出一个角点(特征点),但是当我们要和另外一个图像的特征点匹配时,我们还缺乏一种手段,来描述它们两个是不是相似的,有多相似。
这时候就需要描述子啦,BRIEF(Binary Robust Independent Elementary Features)就提供了一种对特征点的描述手段。
它的思想是,在特征点p附近,S*S大小的像素块内,随机选取一对点a和b。

对比这两个点:
然后选取下一对点重复,假设一共有n对点,把所有点的结果组成一个二值串(可以看做没对点的结果占一个二进制数的一位):
这样我们就得到了这个特征点p的BRIEF描述子。
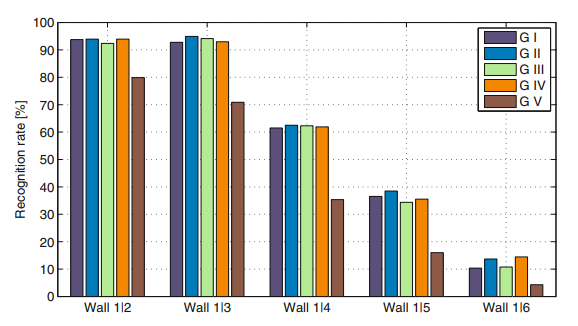
实际上原论文里,对于应该选取多少对点,随机选取点对应该如何随机,都做出了试验,比如随机选取点对,他们尝试了:
-
在像素块内平均采样选取(G I)
-
a,b从(0, S2/25)的正态分布内采样(G II)
-
a从(0, S2/25),b从(0, S2/100)的正态分布内采样 (G III)
-
在空间量化极坐标下离散随机采样 (G IV)
-
a固定为像素块中心,b在周围平均采样 (G V)
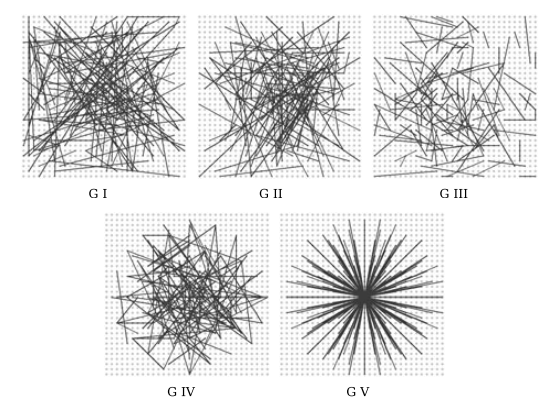
几种方法,最终发现第二种效果最好,先在(0, S2/25)内随机生成n对(2n个,常见n = 128, 256 512)点,然后接下来固定这些点对坐标来对每个特征点计算生成n维的BRIEF描述子。
这样我们就通过特征点p附近的n对点构建了一个n维的BRIEF描述子,它的形式是一个n位的二进制数,对于另一张图的特征点,我们只需要按位比较他们的BRIEF描述子,通过计算不同处的个数,就能计算出他们之间的汉明距离,从而判断它们之间的匹配程度啦!
4.总结
FAST提供了一种特征点检测的方法,它通过计算某一点与周围点的关系,检测出角点来提取图像的特征点,进而提供了特征点的“位置”。
而BRIEF则提供了一种描述特征点自身属性的方法,它通过特征点周围的n个随机点对,构建了一个二进制的描述子,进而描述特征点的“样貌”。
但是提取FAST特征点 + 计算BRIEF描述子这一组合,没有解决下面几个问题:
-
尺度不变:当某个物体的一点在较远处可以认为是角点时,在较近处不一定是角点,反之同理。(想象下飞机上俯瞰汽车,和在面前停着的汽车)。
-
旋转不变:提取到的某个特征点,在旋转后,与原特征点无法匹配。
虽然有SIFT特征点+SIFT描述子的组合,可以解决这些问题,但是其计算的成本太大(包括后续的SURF),无法用在SLAM这样的实时系统里,那么,有没有一个……
当然有!那就是接着FAST + BRIEF这一组合继续下去的ORB特征啦!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号