VSLAM笔记——1. 我们如何通过图像来计算位置的变化:2D-2D的对极几何
想当初就看了好多次高博的《十四讲》,不过当时感觉天书一样,不说看了没能理解的,还有理解了最后又忘了的。
到现在接触视觉SLAM也有一年多了,也尝试过跑别人的开源算法,试着自己写简单的SLAM,总觉得《十四讲》里的讲解顺序并不太适合学习,开头的硬核数学部分,当时着实是差点劝退了我。
正好最近需要好好把这些东西都整理,复习一下,我就按照我自己的理解,以及我觉得比较好的顺序来说说VSLAM吧....
0.复习下相机模型以及各种坐标转换
对于一个三维空间点P(X, Y, Z),根据相机的成像原理,我们能知道,它与对应的图像上的点的像素坐标(u, v)会有这样的对应关系:
这个关系可以写成矩阵的形式,这样以后可以更方便表示和计算。
其中K是相机的内参,它在相机制造后就已经确定了,我们可以通过相机标定来获取它。
借用高博的图来说,这样对于P(X, Y, Z)来说,就像这样:
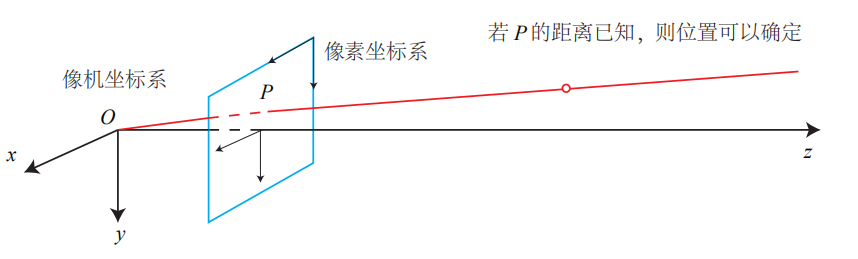
我们可以从P点的三维坐标,通过相机内参矩阵,很容易的算出它在图像上投影点的像素坐标。
但这并不是我们在VSLAM中想要关注的地方,我们想要关注的地方正相反:
如何在知道图像上某点p(u, v)的像素坐标的情况下,算出它所对应的点P在三维空间中的坐标(X, Y, Z)。但是再看一下三维坐标与像素坐标的对应关系:
我们就会发现一个问题:我们已知了像素坐标u,v,已知了相机内参,我们也只能求得X,Y与Z的比值,既X/Z和Y/Z,并不能直接求出来XYZ的具体值。
对于上面高博的图来说,红色连线上所有的点,都会投影在同一点p(u, v)上,那应该是哪个位置的点呢?
1.对极几何
上面说了通过一张图像,我们很难知道对应的三维空间点到底在哪,于是有人想到了这样的办法:
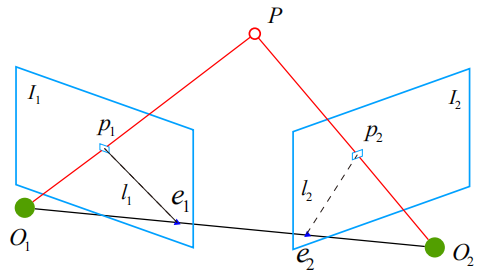
“我们再加一个相机,或者移动一下换个角度,这样两张图片红色线的交叉点不就是P点的空间位置了嘛!”
在这张图里,p1和p2是三维空间点P分别在两张图像上的投影点,射线O1p1和射线O2p2是点P可能的空间位置。
我们把O1O2P组成的平面称为极平面,O1O2称为基线,而O1O2和两个图像平面的交点e1和e2称为极点,极平面与图像平面的相交线称为极线。
再整理一下我们目前未知量,和已知量:
未知的:点P的位置,第二次拍照,或者第二个相机的位置O2
我们已知的:两个像平面的点p1和p2... 呃,这好像什么都不知道嘛。
从直观上来想,如果我们已知了O1和O2的空间位置,我们就能很轻松的知道两条红线在哪里交叉,也就能求出点P的空间位置。
那么反过来如果我们已知了点P和相机O1的空间位置,我们能求出相机O2的位置吗?
答案是可以。
这就是视觉SLAM的想法了,我们试着来推导一下。
相机O2是从相机O1的位置运动来的,我们把这个运动,拆分成旋转和平移两部分,分别用R和t来表示。
假设点P的三维坐标为:
那么它和两个像平面的投影p1和p2,应该满足下面的关系,其中K依然表示相机内参:
这时候我们要开始做一个非常有意思的操作了,既然前面我们通过像平面点p(u, v),只能求出X/Z、Y/Z,那我们不妨设Z=1,相当于在相机前方Z=1处设立了一个平面,那么根据之前的公式,这个平面上的点,与p(u, v)应该有这样的关系:
两边同时处以Z:
整理:
这样我们的到了一个点(X/Z, Y/Z, 1)和像平面点p(u, v)的关系,我们之前设立的Z=1的平面,被称为归一化平面,而(X/Z, Y/Z, 1)这是空间点P在这个平面上的投影,我们设这个投影点为x,于是我们可以知道,P在两个相机的归一化平面点x1、x2, 与像平面点p1、p2存在这样的关系:
将它带入式(1),能得到:
我们由t,可以得到一个它的反对称矩阵t^(参考李群李代数部分):
将式(2)两边同时左乘t^,然后再左乘x2T,得到:
实际上,左乘t**就相当于和**t**做外积,而**tx2是一个同时与t、x2相垂直的向量,因此上式等号左边为0,即:
我们再把p1和p2带入回来:
这时候我们发现:神奇的事情发生了!我们现在不需要知道P点的空间位置,也不需要真正利用归一化平面,只需要知道p1和p2,即两张图上,同一点的像素坐标,以及相机的内参矩阵K,就可以求解两张图之间相机的运动R、t了!(虽然目前还有一小点点障碍)
我们把中间的部分,记作两个矩阵:本质矩阵E、基础矩阵F,则有:
可以看出,本质矩阵E、基础矩阵F的差距只有相机内参K,而K是可以通过相机标定获得的,两个矩阵求出一个就能求出另一个,而这两个矩阵就包含着我们想要求解的相机运动R、t。
所以我们接下来的目标便是求解出其中一个矩阵。
2.本质矩阵E的求解
上面说过,本质矩阵E、基础矩阵F,得其一我们就可以求解相机运动了。
比如ORBSLAM是通过基础矩阵F来求解的,既然是根据《十四讲》整理的笔记,这里就用高博书上的办法,通过本质矩阵E,来求解相机运动吧。
我们再来看一下刚才得到的结论:
其中x1、x2是点P在对应的两个相机的归一化平面的坐标,为了方便描述,我们使用x1 = [u1, v1, 1]T的形式来表示它,E则是我们需要求解的本质矩阵,我们这样表示:
于是之前的式子变成这样:
这个方程还是不太好看,既然我们需要求解的是E中的各个值,我们不妨把E展开,写成向量的形式:
那么刚才的(3)式可以改写成线性形式的:
看起来有点脑壳疼,不过其实就是把之前的(3)式乘完后整理的样子。如果我们有N对点,第i对点我们用ui,vi来表示,那么有:
这下就变成线性方程的形式啦!我们现在的目标就是求解这个线性方程,从而求得本质矩阵E。那么我们需要几对点,才能求出E呢?
从本质矩阵E的定义以及性质来看:
-
E包含的平移t以及旋转R各自有三个自由度,所以E应该具有六个自由度。
-
然而,E由一个等式为0的对极约束定义,E在乘以任何非零常数时,式(3)依旧成立,这是E的尺度不定性,由直觉来思考,由于归一化的操作,平移t和其k倍的kt对于等式都可以成立,比如我们解出t = [1,1,1],这里的“1”我们并不能确认它代表1米还是1千米或者什么。
所以实际上,本质矩阵E只有五个自由度。
于是,理论上,我们可以通过五对点来求解本质矩阵E,然而由于E的非线性,我们很难通过五个点就求解出E,于是我们选择上面公式(4)的方法,求解出E(不过这样做还会有一些其他的问题)。
我们注意到,式(4)也是等于零的,它一样具有尺度不定性,比如把等式两边同时除以e9,那么我们需要求解的量的减少了一个,所以我们需要至少8对点来求解本质矩阵E,这就是八点法(Eight-point-algorithm)。
接下来,我们要做的就是从求得的本质矩阵E中,恢复相机运动的平移t以及旋转R。
3.相机运动恢复——奇异值分解(SVD)
感觉这部分高博讲的不是很清楚,找资料整理再顺畅的讲出来,快吐血了
整个思路很神奇,有点绕,我们回顾一下本质矩阵E的定义:
其中的t^是由平移向量t生成的一个反对称矩阵,根据其性质我们可以把这个反对称矩阵表示成这样的形式:
其中的U,是一个正交矩阵,k是一个实数,Z是下面这个矩阵:
可能你会问,式(5)真的成立吗?我们来推一下,我们设U为:
那么式(5)可以写成
计算一下可得:
正是一个反对称矩阵,说明我们的式(5)是成立的,这样我们就把求解t^转化成了求解U,所以我们要如何找到这样一个U呢?
答案是奇异值分解(SVD)。
我们回顾一下特征值分解,如果有一个mxm的实对称矩阵A,那么这个A可以被分解为这种形式:
其中Q是标准正交阵,其列向量为A的特征向量,Σ是一个只有主对角元素非零,且对角线元素是由大到小排列的A的特征值的对角矩阵。
这个例子中,矩阵A比较特殊,如果我们有一个一般性的矩阵,是否也能做类似的操作呢?这就是奇异值分解。对于一个mxn的实数矩阵A,我们进行奇异值分解,可以得到:
分解的结果,我们得到了mxm的矩阵U和nxn的矩阵V,它们都是正交矩阵,而中间的Σ则是一个mxn的,仅在主对角线有值的矩阵,我们称这些值为奇异值。
对于原矩阵与分解结果,又有这样的关系:
这两个式子和上面的特征值分解形式上非常相似,并且AAT,ATA分别是mxm,nxn的两个对称矩阵,ΣΣT,ΣTΣ也分别是mxm,nxn的,只有主对角线有值,且值为A的奇异值的矩阵。
于是我们可以发现,对AAT,ATA分别做特征值分解,求出的特征矩阵就分别为U和VT了!
于是我们尝试对本质矩阵E做奇异值分解,我们可以得到:
然后通过上面的方法求出其中的U、Σ和VT。可是这有什么用呢?我们再回过头看看本质矩阵E,平移t,旋转R的关系:
其中的Z,我们引入一个正交矩阵W,来把它做一下变形:
其中的diag(1,1,0),表示一个只有主对角线有值,且分别为1,1,0的3x3矩阵,于是本质矩阵E变成这样:
我们来观察这个式子,其中k由于E的尺度不定性,可以去掉。W、UT、R,都是正交矩阵,他们的组合也是一个正交矩阵,我们记作VT,于是:
对比一下上面关于E的奇异值分解结果:
两个式子的U和VT,均是3x3正交矩阵,diag(1,1,0)和Σ均是仅有主对角线有值的3x3矩阵,那是不是说,我们只要把本质矩阵E,进行奇异值分解,就可以得到式(6)中的U和VT了呢!!
现在唯一的疑问,就是diag(1,1,0)和Σ是否对应,其实我们是能够证明,本质矩阵E是具有两个相等奇异值的矩阵,并且由于E的尺度不定性,我们完全可以将两个奇异值设为1,具体可以参考下面的连接。
这样我们终于找到了这样一个神奇的方法:
-
本质矩阵E,平移t,旋转R的关系,其实就是将E进行奇异值分解后的结果。
-
进而我们可以通过分解后的U,求出平移t^。
\[t^{∧} = kUZU^{T} \] -
最后通过我们自定的w,分解出的VT,求得旋转R
\[V^{T} = WU^{T}R \]但是这里还有一个问题,就是通过U来表示t^时,我们设定的Z:
\[Z = \begin{pmatrix}0 & 1 & 0\\ -1 & 0 & 0\\ 0 & 0 & 0\end{pmatrix} or Z = \begin{pmatrix}0 & -1 & 0\\ 1 & 0 & 0\\ 0 & 0 & 0\end{pmatrix} \]都能满足要求(实际上是E的分解有diag(1,1,0)和diag(-1,-1,0)两种情况),这就造成了我们最终求得的t^共有两种,对应的R,也有两种,共计四组解:
\[t^{∧}_{1} = kUdiag(1,1,0)WU^{T}\\t^{∧}_{2} = kUdiag(-1,-1,0)WU^{T} \]这四组解实际上分别是这四种情况:
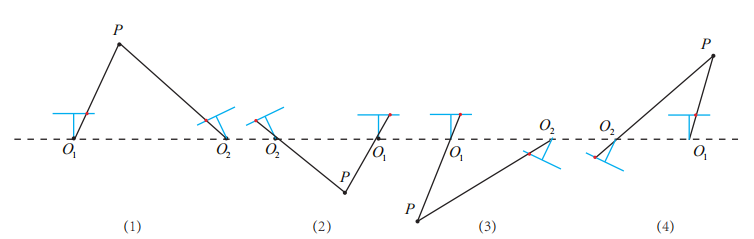
我们都知道三维点P的深度,只可能大于零,所以最后我们也能正确筛选出正确的解。
总结:
-
通过对极几何,我们能了解到,两张图像上对应点p1和p2,以及与相机的旋转R,平移t存在这样的关系:
\[p_{2}^{T}K^{-T}t^{∧}RK^{-1}p_{1} = 0\\E = t^{∧}R , F = K^{-T}EK^{-1}\\x_{2}^{T}Ex_{1} = p_{2}^{T}Fp_{1} = 0 \] -
其中的本质矩阵E,可以通过找到两张图中,8对两两对应的图像点,通过八点法求解得出
-
而本质矩阵E,通过奇异值分解(SVD),可以求解出旋转R以及平移t
由此我们知道了如何从两幅图像,恢复相机的运动,而VSLAM的一大思想,就是通过图片,求出图与图之间的位姿变化(R、t),即求出本质矩阵E和基础矩阵F,不过在这里,我们事先假设了我们已知两幅图像上,哪两个点是互相对应的,于是接下来我们的问题就转化成:如何找到两张图像的对应点啦!
思考:
1.对极几何求解相机位姿,是2D(图像)到2D(图像)的,我们仍然未知图像点对应的空间点P的位置,它可能在相机光心与图像点连线(那条红色线)的任意一处上,为了解决这个问题,我们可以使用RGBD相机来直接获取P的深度,或者采用三角化的方法,来获取对应点的深度。实际上对于RGBD相机或者双目相机,有更好的求解相机位姿的方法,比如对于RGBD相机我们可以通过3D-3D的ICP求解,或者3D-2DPnP求解,但是他们都需要知道空间点P的位置,而对于单目相机而言,不知道相机的运动就无法算出P的位置(无法三角化求解),进而也无法用ICP或者PnP求解相机运动,这似乎就成了鸡生蛋,蛋生鸡的问题了,所以单目相机是需要通过对极几何来进行初始化的,然而初始化也并非对极几何这么简单,如果后面我有空整理单目相机初始化的部分再叙述吧。
2. 在求解本质矩阵E时,我们采用了八点法,那么如果图像中的配对点,多余8个,或者存在错误匹配的情况,要怎么解决呢?如果我们的匹配点,多与8个,那很有可能由于构建出了一个超定方程,导致无解。这时候可以通过最小二乘来求出一个最小二乘意义下的本质矩阵E。当存在错误匹配时候,我们也可以通过随机采样一致性(RANSAC)的方法来处理错误匹配。
3. 想到再补充

 浙公网安备 33010602011771号
浙公网安备 33010602011771号