

opencv —— HoughLines、HoughLinesP 霍夫线变换原理(标准霍夫线变换、多尺度霍夫线变换、累积概率霍夫线变换)及直线检测
霍夫线变换的原理
- 一条直线在图像二维空间可由两个变量表示,有以下两种情况:
① 在笛卡尔坐标系中:可由参数斜率和截距(k,b)表示。
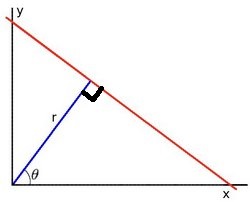
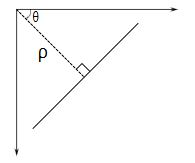
② 在极坐标系中:可由参数极经和极角(r,θ)表示。
对于霍夫线变换,我们将采用第二种方式极坐标系来表示直线,因此直线的表达式可为:
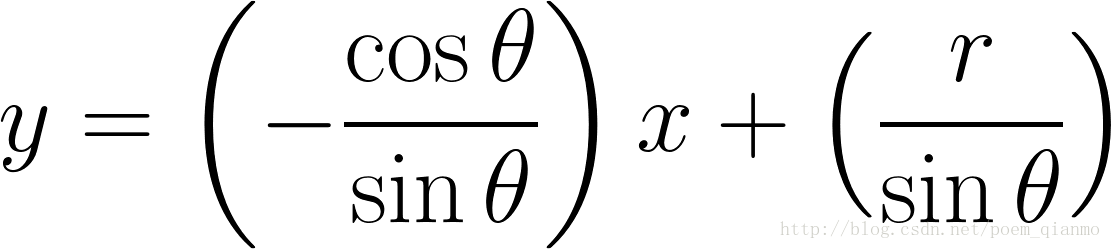
化简便可得到:
![]()
- 对于(x0,y0),我们可以将通过这一点的所有直线统一定义为:
![]()
这就意味着每一对  代表一条通过点
代表一条通过点  的直线。
的直线。
-
对于一个给定点
,我们可以在直角坐标系中,绘出所有通过它的直线(θ 为 x 轴,r 为 y 轴)。最终我们将得到一条正弦曲线。
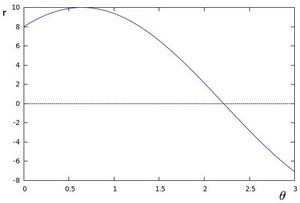
注意:只绘出满足下列条件的点  and
and  。
。
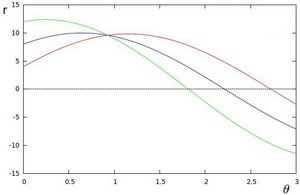
- 我们可以对图像中所有的点进行上述操作.。如果两个不同点进行上述操作后得到的曲线在平面
 -
-  相交, 这就意味着它们有一个公共的(θ,rθ),即过一条公共的直线。下图中,若曲线每点权重均为 1 ,则交点处权重为 3。
相交, 这就意味着它们有一个公共的(θ,rθ),即过一条公共的直线。下图中,若曲线每点权重均为 1 ,则交点处权重为 3。
-
越多曲线交于一点,也就意味着这个交点表示的直线由更多的点组成,权重和越大。我们可以设置一个阈值,来决定多少条曲线交于一点(权重多大)我们才认为检测到了一条直线。
-
这就是霍夫线变换要做的.。它追踪图像中每个点对应曲线间的交点.。如果交于一点的曲线的数量超过了阈值, 那么可以认为这个交点所代表的参数对
 在原图像中为一条直线。
在原图像中为一条直线。
OpenCV 实现了以下三种霍夫线变换:
- 标准霍夫变换(StandardHough Transform,SHT)
- 原理在上面的部分已经说明了. 它能给我们提供一组参数对(ρ,θ)的集合来表示检测到的直线。
- 在 OpenCV 中通过函数 HoughLines 来实现。
- 多尺度霍夫变换(Multi-ScaleHough Transform,MSHT)
- 和标准霍夫变换类似。
- 累计概率霍夫变换(ProgressiveProbabilistic Hough Transform,PPHT),由HoughLinesP函数调用。
- 这是执行起来效率更高的霍夫线变换. 它输出检测到的直线的端点
 。
。 - 在 OpenCV 中它通过函数 HoughLinesP 来实现。
- 这是执行起来效率更高的霍夫线变换. 它输出检测到的直线的端点
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn = 0, double stn = 0);
- image,输入图像,即源图像。需要为 8 位的单通道二值图像。
- lines,存放直线的矢量信息的数组。每条直线由具有 2 个元素的矢量(ρ,Θ)表示,其中,ρ 是离坐标原点(0,0)也就是图像左上角的距离,Θ 是弧度线条旋转角度(0 表示垂直直线,∏/2 表示水平直线,注意,不是 0 度和 90 度)
- rho,以像素为单位的距离精度。另一种表述是平面 - 中 r 轴的单位长度。
- theta,以弧度为单位的角度精度。另一种表示是平面 - 中 θ 轴的单位长度。
- threshold,权重累加平面的阈值参数。大于阈值 threshold 的线段才可以被确认为直线。
- srn,默认值为 0。多尺度霍夫线变换才会用到的参数。对于多尺度霍夫线变换,平面 - 中 r 轴的单位长度 = rho / srn。
- stn,默认值为 0。也是多尺度霍夫线变换才会用到的参数。对于多尺度霍夫线变换,平面 - 中 θ 轴的单位长度 = theta / stn。如果 srn、stn 同时为 0,就表示使用经典霍夫变换,否则两个参数都应该为正数。
代码示例:
#include<opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int hough_value = 70;
Mat src, canny_img;
void hough_change(int, void*) {
vector<Vec2f>lines;
HoughLines(canny_img, lines, 1, CV_PI / 180.0, hough_value);
RNG rngs = { 12345 };
Mat show = src.clone();
for (int i = 0; i < lines.size(); i++) {
float rho = lines[i][0], theta = lines[i][1];
double sin_theta = sin(theta), cos_theta = cos(theta);
double x = rho * cos_theta, y = rho * sin_theta;
//以垂点为基础,将直线延长
Point pt1, pt2;
pt1.x = cvRound(x + 1000 * (-sin_theta));
pt1.y = cvRound(y + 1000 * (cos_theta));
pt2.x = cvRound(x - 1000 * (-sin_theta));
pt2.y = cvRound(y - 1000 * (cos_theta));
Scalar colors = Scalar(rngs.uniform(0, 255), rngs.uniform(0, 255), rngs.uniform(0, 255));
line(show, pt1, pt2, colors, 2);
}
imshow("show", show);
}
int main() {
src = imread("C:/Users/齐明洋/Desktop/1.jpg");
GaussianBlur(src, src, Size(3, 3), 0, 0);
imshow("src", src);
Canny(src, canny_img, 55, 110, 3);
imshow("canny_img", canny_img);
namedWindow("show");
createTrackbar("threshold", "show", &hough_value, 200, hough_change);
hough_change(0, 0);
waitKey(0);
}
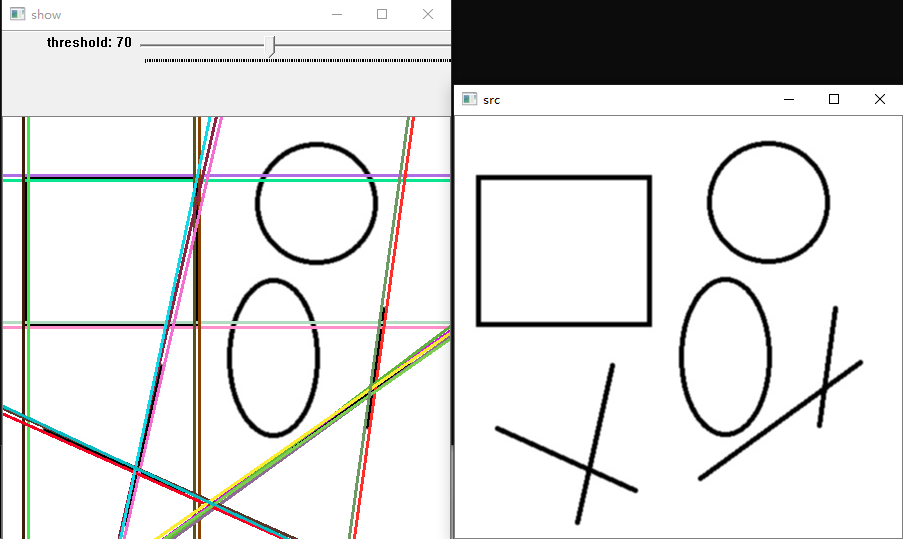
效果演示:
累计概率霍夫变换:HoughLinesP 函数
void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLength = 0, double maxLineGap= 0);
- lines,存放直线信息矢量的数组。每条直线由具有 4 个元素的矢量(x_1,y_1,x_2,y_2)表示,其中,(x_1,y_1)和(x_2,y_2)是每条检测到的直线的两端端点。
- minLineLength ,默认值为 0。最短线段的长度,比这个设定参数短的线段就不能被显现出来。
- maxLineGap,默认值为 0。允许将同一行点与点之间连接起来的最大距离。
- 其余参数,类比 HoughLines 函数的参数。
代码示例:
#include<opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int hough_value = 70;
Mat src, canny_img;
void hough_change(int, void*) {
vector<Vec4f>lines;
HoughLinesP(canny_img, lines, 1, CV_PI / 180, hough_value, 10, 5);
RNG rngs = { 12345 };
Mat show = src.clone();
for (int i = 0; i < lines.size(); i++) {
Point pt1, pt2;
pt1.x = lines[i][0];
pt1.y = lines[i][1];
pt2.x = lines[i][2];
pt2.y = lines[i][3];
Scalar colors = Scalar(rngs.uniform(0, 255), rngs.uniform(0, 255), rngs.uniform(0, 255));
line(show, pt1, pt2, colors, 2);
}
imshow("show", show);
}
int main() {
src = imread("C:/Users/齐明洋/Desktop/1.jpg");
GaussianBlur(src, src, Size(3, 3), 0, 0);
imshow("src", src);
Canny(src, canny_img, 55, 110, 3);
imshow("canny_img", canny_img);
namedWindow("show");
createTrackbar("threshold", "show", &hough_value, 200, hough_change);
hough_change(0, 0);
waitKey(0);
}
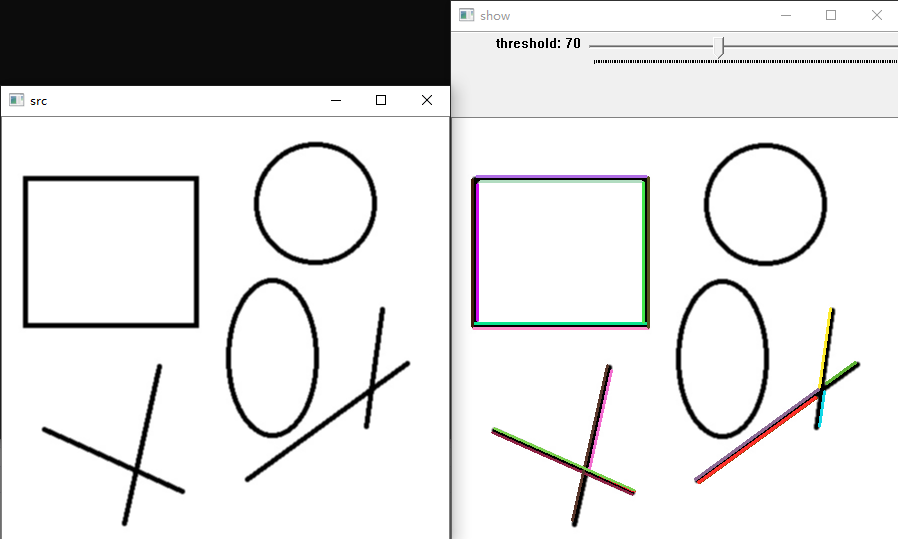
效果演示:
借鉴博客:https://www.cnblogs.com/xmu-rcs-jty/p/7531814.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号