智能佳 E-PUCK2单体智能介绍



E-PUCK 2.0机器人系统介绍
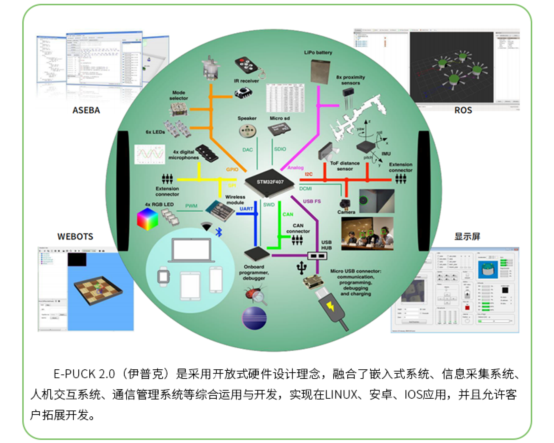
E-PUCK 2.0(伊普克)嵌入式机器人是由瑞士洛桑联邦理工学院(EPFL )开发的小型移动式机器人,已在国内外上百所高校和研究院在使用,例如斯坦福、剑桥大学、苏黎世联邦理工学院、清华大学、北京大学、国防科技大学等,并有很多研究成果发表在IEEE、FreeCheck等核心期刊中。
E-PUCK 2.0为高端桌面型嵌入式机器人,可以在有限的空间内融入大量的智能机器人进行群体协作实验,凭着其在任务适用性、经济性、稳定性、可拓展性、软件开放性等方面有极大的优越性。
E-PUCK2.0产品特点
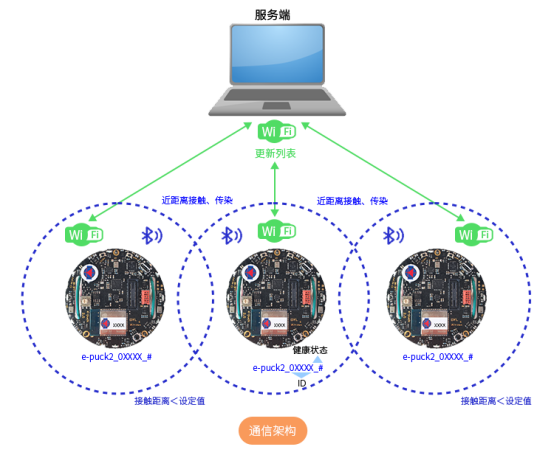
机器人之间通信方式
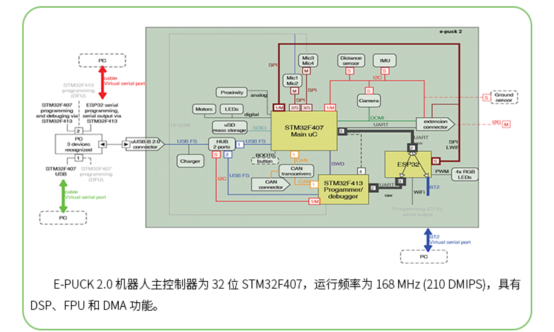
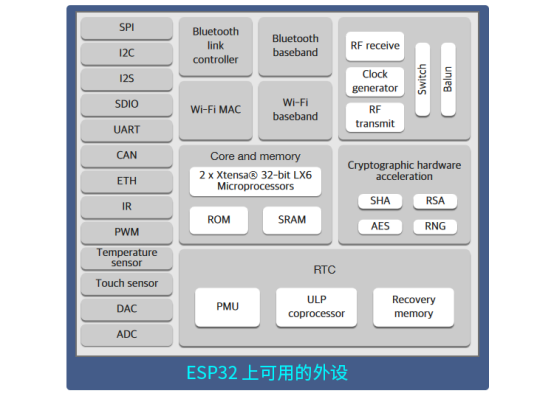
E-puck无线通讯芯片采用来自Espressif的ESP32芯片,它集成了一个运行频率高达240 MHz、4 MB 闪存和 520 KB RAM 的双核处理器。它支持WiFi、蓝牙BT和低功耗蓝牙BLE4.2。该芯片不仅负责处理WIFI和蓝牙的无线通信,它还负责处理(带PWM)RGB LED和用户按钮等功能。
典型案例:病毒局部感染传播
Ø BLE 和 WiFi 双系统组网;Ø利用 BLE传感器广播信号和接收信号;Ø通过BLE信号强度 (RSSI) 进行机器人接近检测,模拟现实中的病毒感染。
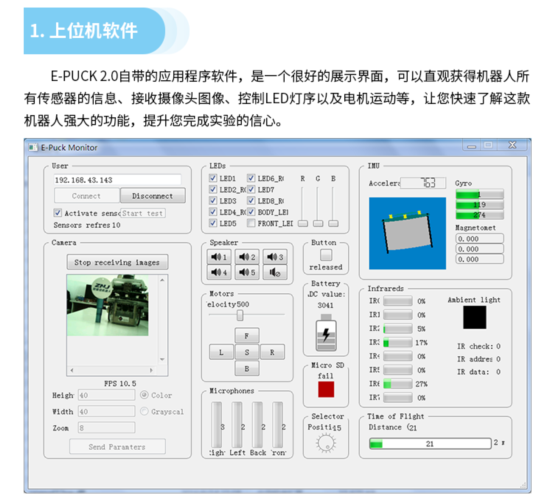
E-PUCK 2.0机器人相关软件

可选拓展设备
|
|
|
|
|
|
|
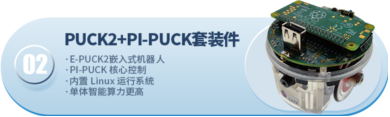
PI-PUCK核心控制板 |
测距模块 |
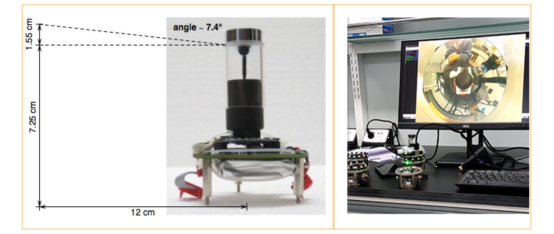
360°环视摄像头 |
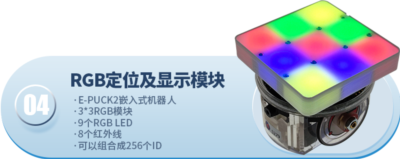
RGB定位及显示模块 |
快速充电器 |
|
树莓派zero w开发板拓展机器人算力 |
探测机器人四周相对距离和角度 |
采集机器人四周图像信息 |
组合256DI编码和色彩显示 |
给单块电池快速充电 |





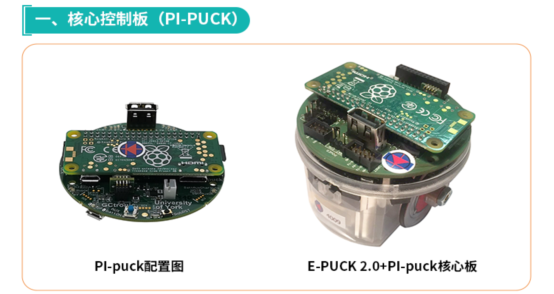
核心控制板配有树莓派zero w可以运行Linux,提升E-puck 2.0机器人算力,可以验证神经网络算法。
技术参数:
|
采用树莓派Zero W核心处理器; |
配有16G micro SD; |
|
内置标准的Linux运行系统; |
2个RGB LED状态指示灯; |
|
1个数字麦克风; |
1个1W扬声器; |
|
支持充电墙自动充电和USB充电; |
6个I2C接口、2个ADC输入接口; |
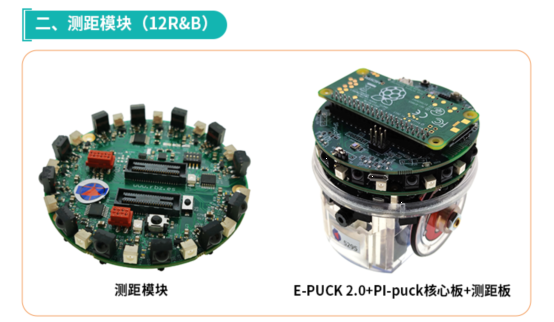
该模块包括12对红外发射与接收传感器,可以在没有其他集中控制或外部定位设备控制的情况下,实现机器人之间的相对角度和距离感知,以及近距离通讯功能。
技术参数:
|
采用MicroChip dsPIC33F系列核心处理器; |
12对红外发射/接收传感器; |
|
红外模块角度分配约30°; |
MAX 测距范围约80cm; |
|
支持I2C和RS232两种通讯模式; |
电压范围:2.5 V至6 V; |
|
1个TV Remote 接收器 ; |
1个档位选择开关; |

该模块通过摄像头与“丁”字形抛物面镜结合,可实现360度环视图像信息采集,能完成斑点识别、图像追踪以及其他目标识别等任务。
技术参数:
|
500万像素VGA 彩色摄像头; |
360°环视抛物面镜; |
|
分辨率 MAX 支持 1280x1024; |
帧速率 MAX 支持 30 fps |
|
视场在地平线上 MAX 约 7 度 |
通过I2C连接树莓派Zero W接口; |
|
支持openCV图像处理、斑点、颜色和光线检测。 |
|

红外线被认为是识别传感器,通过8个红外线的打开与关闭组合可以编码出 256 个不同的机器人ID。9个RGB LED都可独立控制,通过 I2C 总线可以精细化控制颜色组合,例如通过前置摄像头观看周围环境变化,实现机器人类似变色龙LED显示。
技术参数:
|
9个RGB LED |
8个红外线 |
|
PIC18F6722 微控制器 |
通过 I2C 总线与机器人通信 |

每次可为一块电池提供充电(5V 2A),根据电池的放电状态,大约需要1h20-1h50充满。
主要研究课题及方向
|
智能蚁群算法 |
人员自然流动算法 |
|
群居活动聚类算法 |
仿生机器人学优化算法 |
|
自主决策与远程控制算法 |
病毒传播模型算法 |
|
子群优化算法 |
多机器人协同合作算法 |
|
人工神经网络算法验证 |
|
智能佳机器人
400 099 1872
www.bjrobot.com
购买咨询:智能佳(ZNJ) E-PUCK2单体智能与分布式群体智能集群算法机器人协同系统 分布式人工智能及控制 分布式集群控制机器人协作平台【图片 价格 品牌 报价】-京东 (jd.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号