
ros qt 項目增加新的线程
准备工作:
创建一个qt ros 项目,参考上篇博客 ubuntu18.04 在QT中添加ros环境搭建 亲测可用
创建线程步骤:
(1)创建一个QT应用
(2)创建线程类,继承QThread
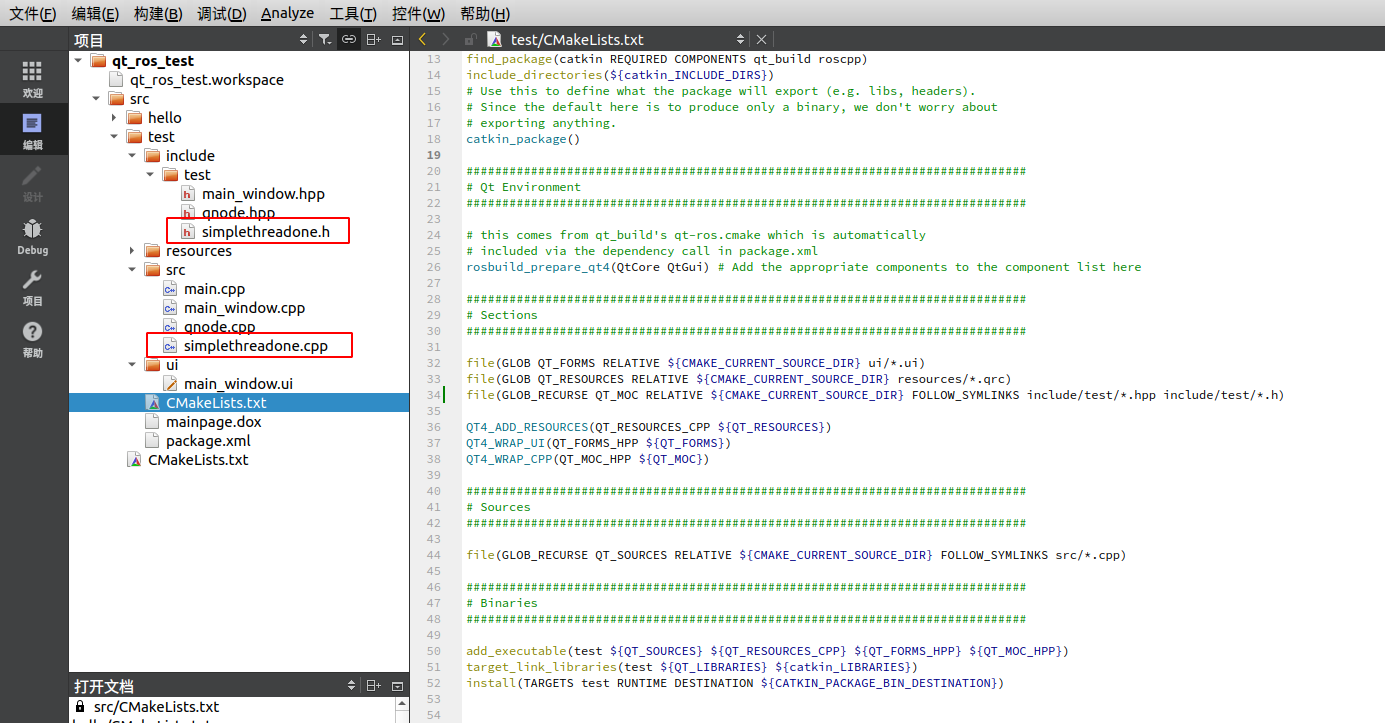
1 在我的test功能包里新建 simplethreadone.cpp 和 simplethreadone.h
simplethreadone.h
#ifndef SIMPLETHREADONE_H #define SIMPLETHREADONE_H #include <QThread> class SimpleThreadOne : public QThread { public: SimpleThreadOne(); void run(); };
simplethreadone.cpp
#include "../include/test/simplethreadone.h" #include <QDebug> SimpleThreadOne::SimpleThreadOne() { } void SimpleThreadOne::run() { while (true) { qDebug()<<"SimpleThreadOne run!"; sleep(2); } }
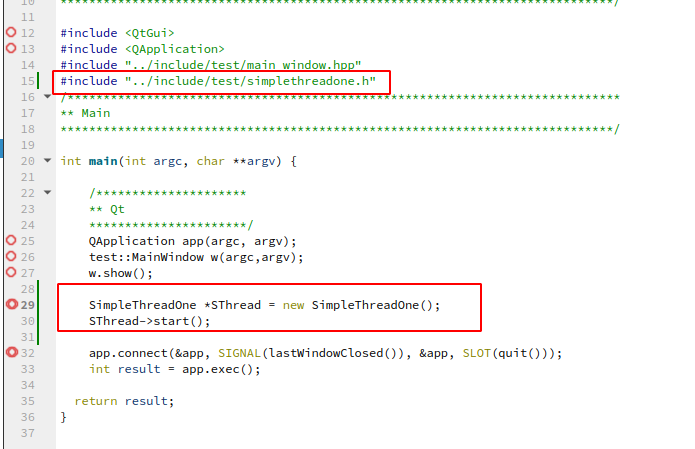
2、主线程中创建线程对象,使用start()方法启动线程。
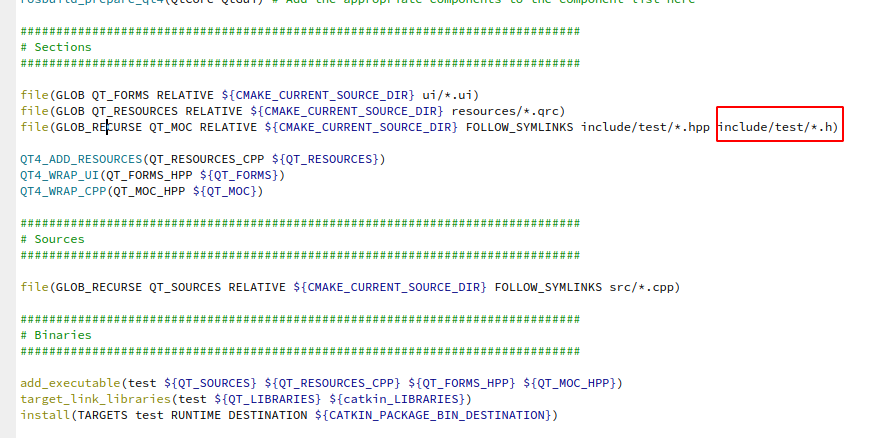
3、修改 CMakeLists.txt 增加 头文件
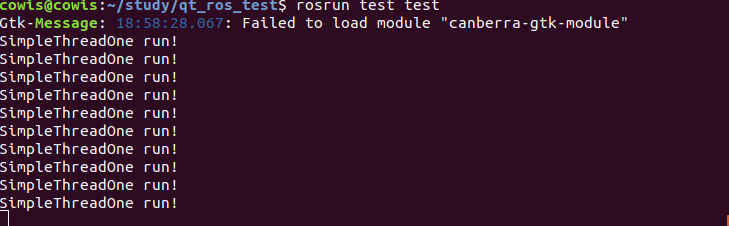
4、在终端中编译、运行
catkin_make source devel/setup.bash rosrun test test
结果 :
Talk is cheap, show me the code

 浙公网安备 33010602011771号
浙公网安备 33010602011771号