ext 库及 pb_ds 在 OI 中的应用
ext 库在 OI 中的应用
写一个帖子,防止以后忘了。
pb_ds 部分
pb_ds 万能头
#include<bits/extc++.h>
来包含 ext 库中所有的头文件(例如 pb_ds 和 rope)。
但是这句话在非 Ubuntu 环境下可能会显示缺失 iconv.h。 这个在 OI 是可以使用的,因为评测机的 NOI-linux2.0 是 Ubuntu 环境,但如果你考试不开虚拟机是不可以在 Windows 下运行的。
优先队列
由于常数的优劣性,本文只介绍 pairing_heap_tag 配对堆。
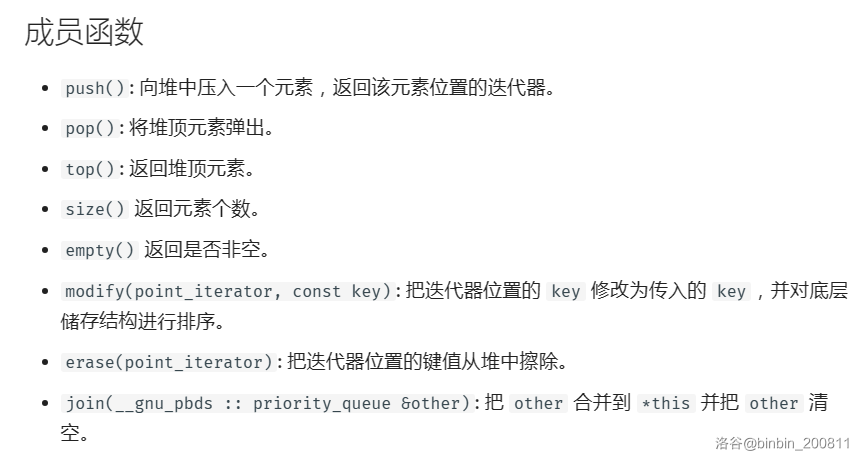
Ps:modify 相当于更改一个点的点权,erase 相当于删除一个点,join 相当于合并两个堆,并清空后者,基本替代左偏树。

然而定义却比较复杂。
示例定义:
#include<bits/stdc++.h>
#include <ext/pb_ds/priority_queue.hpp>
using namespace std;
using namespace __gnu_pbds;
__gnu_pbds::priority_queue<int,greater<int>> a,c;//定义类型
__gnu_pbds::priority_queue<int> d;//默认大根堆
__gnu_pbds::priority_queue<int>::point_iterator it;//定义指针
struct node
{
int x,y;
bool friend operator <(const node a,const node b)
{
return a.x+a.y<b.x+b.y;
}
};
__gnu_pbds::priority_queue<node> b;
int main()
{
a.push(1),a.push(2),a.push(3);
cout<<a.top()<<"\n";//输出 1
c.join(a);
cout<<a.size()<<"\n";//输出 0
cout<<c.size()<<"\n";//输出 3
cout<<c.top()<<"\n";//输出 1
c.pop();
cout<<c.top()<<"\n";//输出 2
d.push(1),it=d.push(2),d.push(3);
cout<<d.top()<<"\n";//输出 3
d.modify(it,10);
cout<<d.top()<<"\n";//输出 10
b.push({1,1}),b.push({2,2}),b.push({3,3});
cout<<b.top().x<<"\n";//输出 3
}
建议阅读:堆 - OI Wiki
平衡树
#include <ext/pb_ds/assoc_container.hpp>//因为tree定义在这里 所以需要包含这个头文件
#include <ext/pb_ds/tree_policy.hpp>
using namespace __gnu_pbds;
tree<int, null_type, less<int>, rb_tree_tag, tree_order_statistics_node_update>
Key: 键的类型,示例的类型是int。Mapped: 映射规则(Mapped-Policy)类型:- 如果要指示关联容器是 集合,类似于存储元素在
std::set中,此处填入null_type,低版本g++此处为null_mapped_type; - 如果要指示关联容器是 带值的集合,类似于存储元素在
std::map中,此处填入类似于std::map<Key, Value>的Value类型。
- 如果要指示关联容器是 集合,类似于存储元素在
Cmp_Fn: 关键字比较函数,例如std::less<Key>。Tag: 选择使用何种底层数据结构类型,默认是rb_tree_tag,由于其他两种效率不高,所以这里只解释此类型。Node_Update:用于更新节点的策略,默认使用null_node_update,若要使用kth和rank的函数,需要使用tree_order_statistics_node_update。
成员函数
insert(x):向树中插入一个元素 x,返回std::pair<point_iterator, bool>。erase(x):从树中删除一个元素/迭代器 x,返回一个bool表明是否删除成功。order_of_key(x):返回 x 以Cmp_Fn比较的较小数的个数(求完以后加 1,才是排名)。find_by_order(x):返回Cmp_Fn比较的排名所对应元素的迭代器。lower_bound(x):以Cmp_Fn比较做lower_bound,返回迭代器。upper_bound(x):以Cmp_Fn比较做upper_bound,返回迭代器。join(x):将 x 树并入当前树,前提是两棵树的类型一样,x 树被删除。split(x,b):以Cmp_Fn比较,小于等于 x 的属于当前树,其余的属于 b 树。empty():返回是否为空。size():返回大小。
注意事项
- 使用
null_type的平衡树是不支持重复元素的,如有重复元素插入需要,可以开pair第二位搭配随机数食用。
失效保证(invalidation_guarantee)
pb_ds 提供了三种失效保证(不是所有的容器的有三种),分别是:
basic_invalidation_guarantee - 基本失效保证,最弱的无效保证。可以保证在容器没有修改时候迭代器,指针等保持有效。
Ps:没有修改的情况下,指针所指的元素还是原来的元素。
point_invalidation_guarantee - 点失效保证,更强的无效保证。可以保证在修改容器但迭代器等所指的东西没有被删除是保持有效。
Ps:修改后,如果修改的不是指针所指的元素,那么指针所指的元素还是原来的元素。
range_invalidation_guarantee - 范围失效保证,最强的无效保证。在 点失效保证 的基础上,保证相对位置不变。
Ps:修改后,如果修改的不是指针所指的元素,那么指针所指的元素还是原来的元素;同时,保证指针的相对位置不变。
pairing_heap_tag 均为点失效保证。
rb_tree_tag 为范围失效保证。
其它
ROPE
参考文献
鸽一下……

 浙公网安备 33010602011771号
浙公网安备 33010602011771号