Linux系统中使用vscode调试C++代码
1.内容说明
最近想重新体验一下debug C++程序,之前都没有尝试过用VSCODE调试C++程序。最近搜集资料并进行了尝试,记录如下
参考链接:
https://github.com/ms-iot/vscode-ros
https://blog.csdn.net/qq_59084325/article/details/125662393
在VScode中ROS Debug配置
2. 前提准备
安装必要插件
编译Debug版本
在目录的终端执行
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE=Debug
source devel/setup.bash
3.关键文件配置
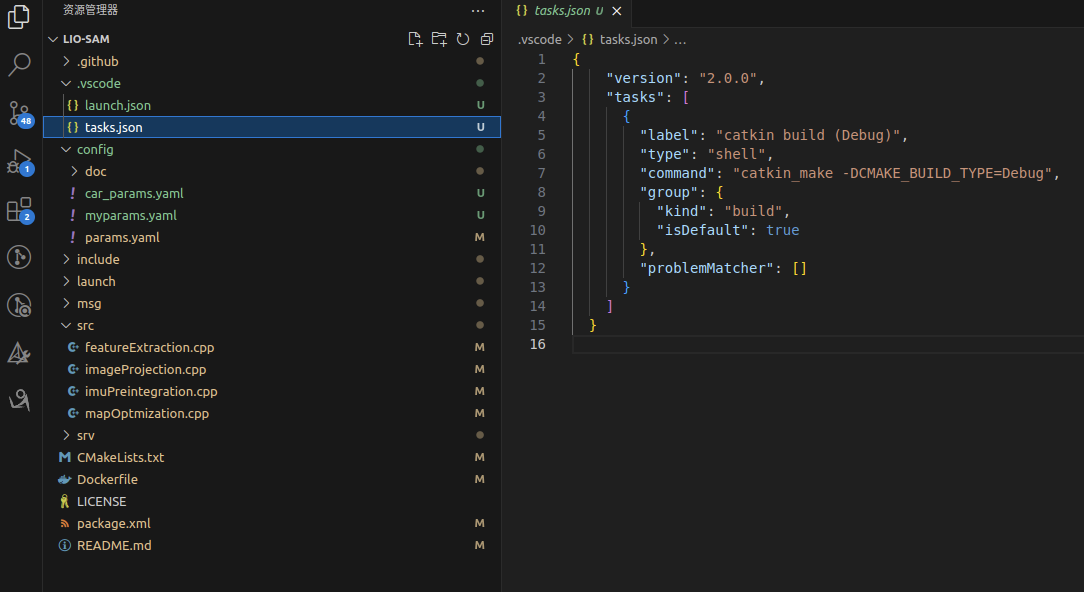
task.json 编译配置文件(可选)
task.json为编译配置文件,一般打开后会自动在文件目录的.vscode下自动生成。需要自动或者手动填写内容。填写的内容一般如下。无需更改
{
"version": "2.0.0",
"tasks": [
{
"label": "catkin build (Debug)",
"type": "shell",
"command": "catkin_make -DCMAKE_BUILD_TYPE=Debug",
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": []
}
]
}
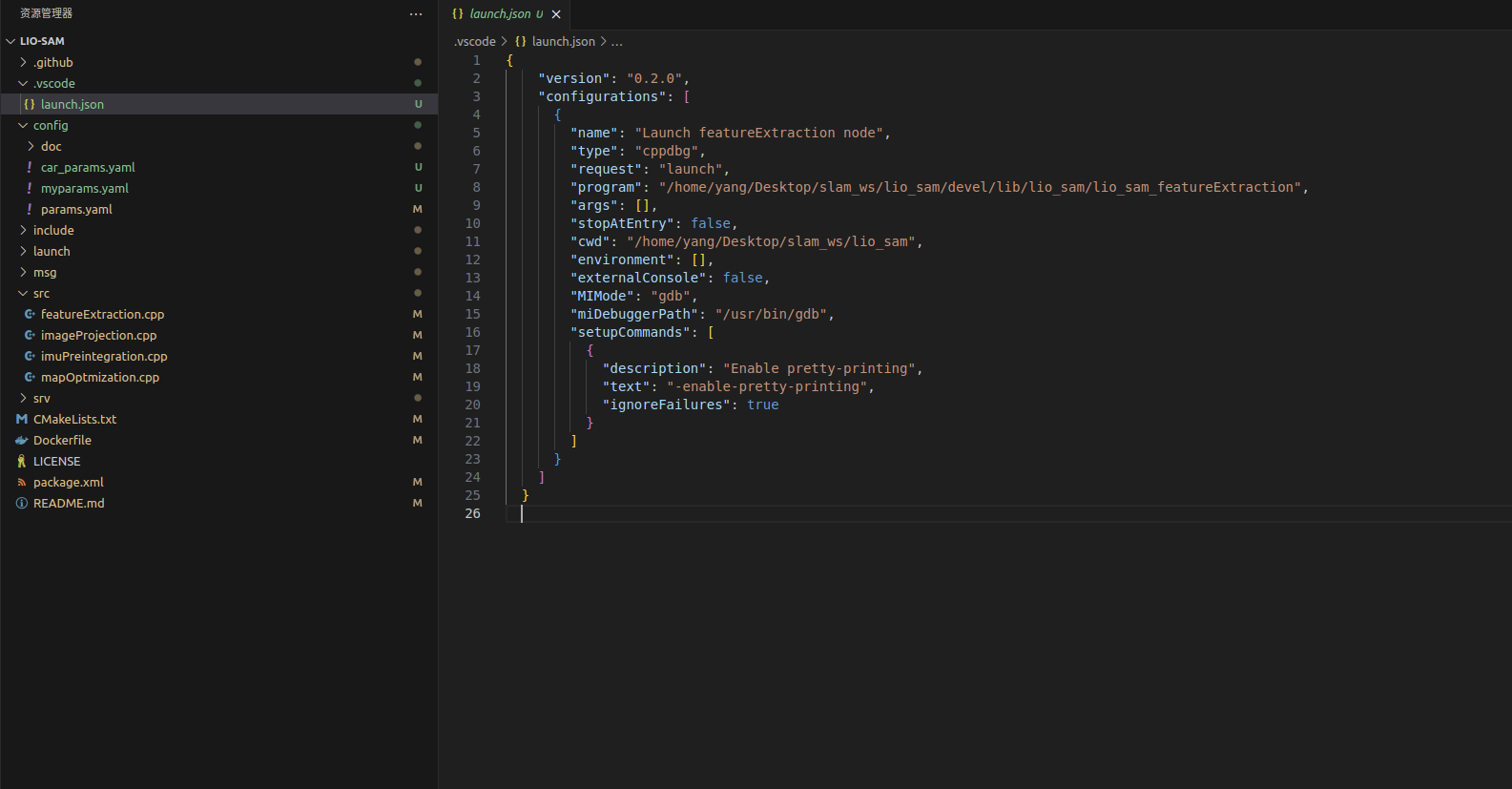
launch.json 调试配置文件
launch.json是与调试相关的配置文件,需要手动添加并输入以下内容。通常情况下需要对program和cwd参数进行修改,改成对应的文件路径。
ps:点击左侧第四个选项``运行和调试,点击右下角添加配置会自动以gdb启动。
{
"version": "0.2.0",
"configurations": [
{
"name": "Launch xxx node",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/devel/lib/xxx/xxx", #改为可执行文件的绝对路径
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}", #改为项目工作空间
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"miDebuggerPath": "/usr/bin/gdb",
"setupCommands": [
{
"description": "Enable pretty-printing",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
],
"preLaunchTask": "catkin build (Debug)" #与task.json的name保持一致
}
]
}
c_cpp_properties.json include文件配置(?非必要)
配置 include 路径,帮助 IntelliSense 正常工作:
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/opt/ros/noetic/include/**",
"/usr/include/**",
"/usr/include/eigen3/**"
],
"defines": [],
"compilerPath": "/usr/bin/g++",
"cStandard": "c11",
"cppStandard": "c++14",
"intelliSenseMode": "linux-gcc-x64"
}
],
"version": 4
}
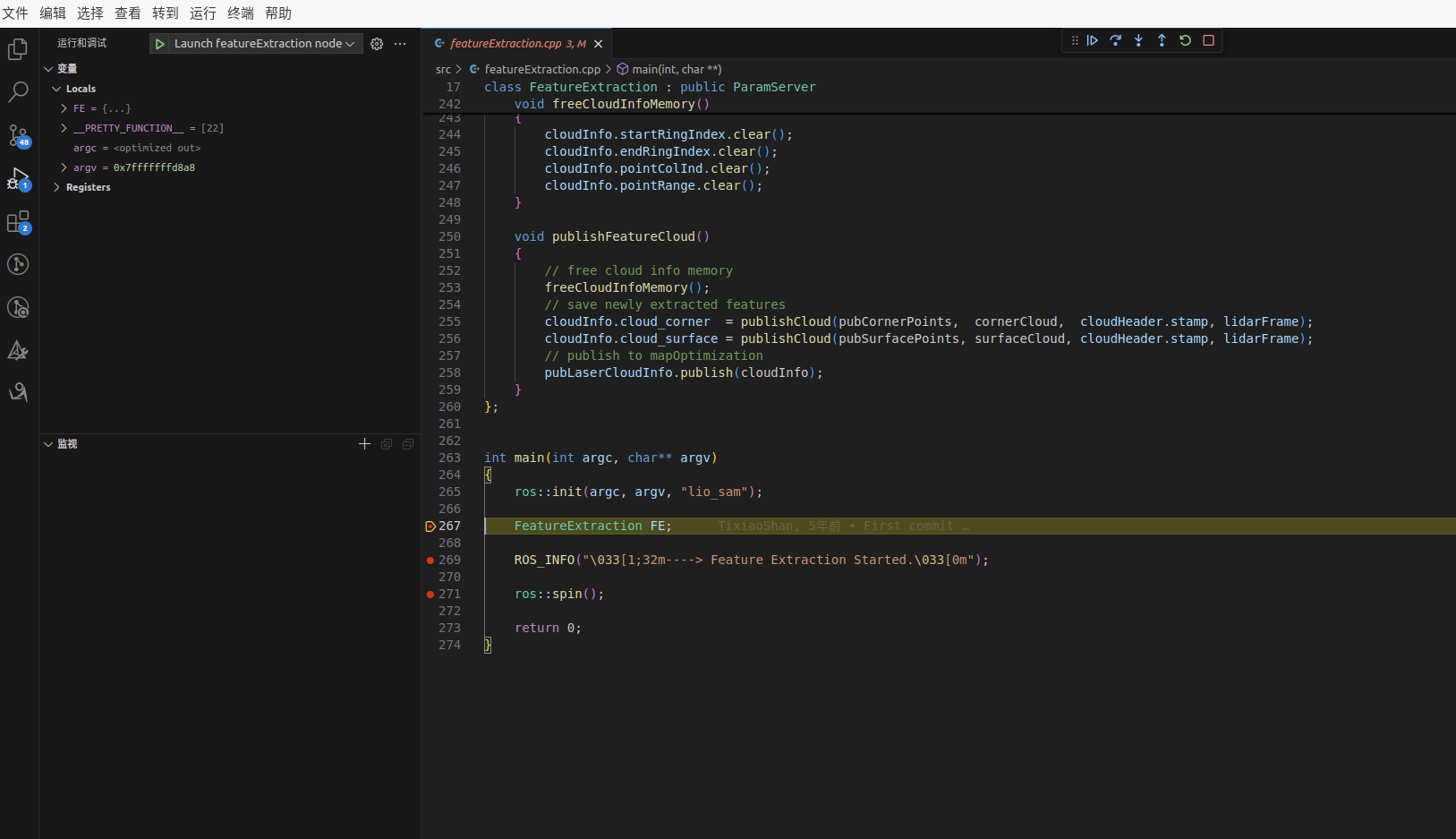
4.手动输入调试
在配置好关键文件之后,就可以通过VSCODE侧边栏的运行和调试(ctrl+shift+D)进行调试。下面以调试LIO-SAM为例进行说明
-
安装插件
在vscode的插件广场中,安装所需的插件 -
配置关键文件
配置tasks.json
配置launch.json
-
开始调试
5.Vscode调试ROS
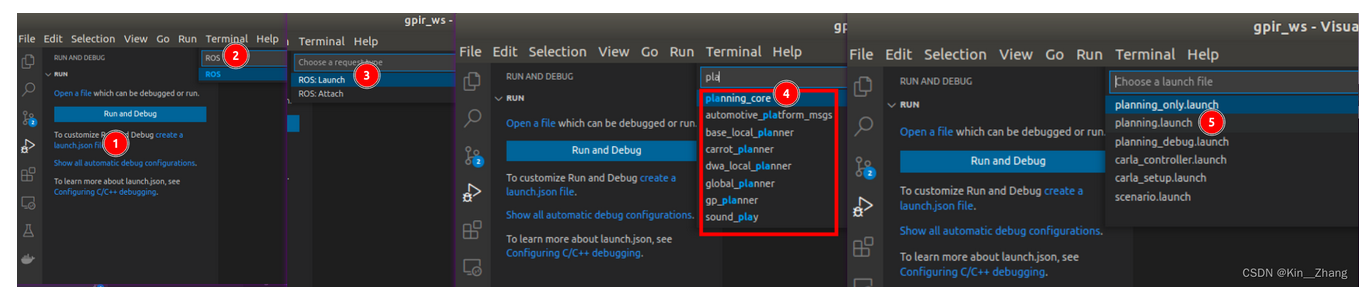
ROS官方提供了方法能够快速调试ROS的launch文件,给的gif操作如下:
- 打开右侧debug也就是上一步里面的步骤了,然后点击create new
- 在②步红点中 如图输入ROS
- 在③步红点中 如图选择ROS: Launch
- 然后出现的就是你能source到的所有的launch文件,输入你想launch的文件

 浙公网安备 33010602011771号
浙公网安备 33010602011771号