无刷电机控制基本原理
无刷直流电机与一般直流电机不同,结构上,无刷电机和有刷电机有相似之处,也有转子和定
子,只不过和有刷电机的结构相反;有刷电机的转子是线圈绕组,和动力输出轴相连,定子是永磁
磁钢;无刷电机的转子是永磁磁钢,连同外壳一起和输出轴相连,定子是绕组线圈,去掉了有刷电
机用来交替变换电磁场的换向电刷,故称之为无刷电机(Brushless motor)。
六步时序换相
无刷电机内部线圈简化为3个绕组,其实是多个,你可以理解为A绕组为多个并联,B、C绕组
同样为多组并联,简化图如下:
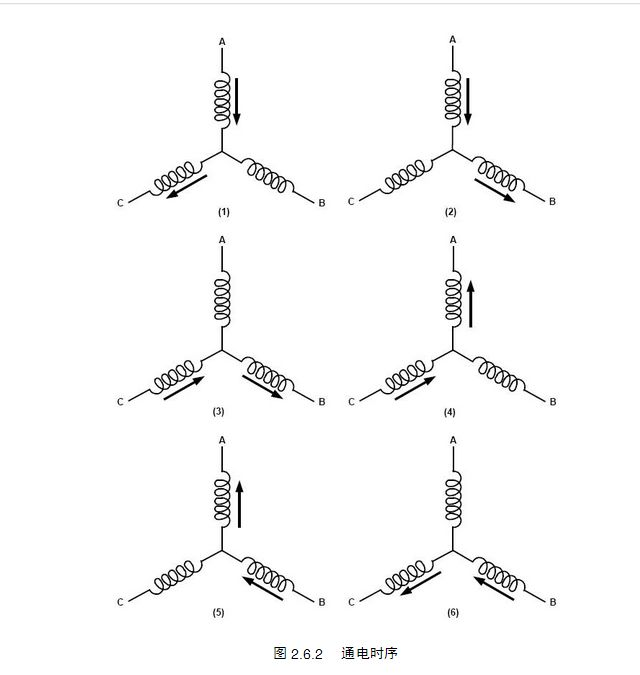
要想让BLDC转起来,必须给绕组按时序通电,使其产生旋转磁场来和转子上的永久磁场依次排
斥吸引,就带动转子上的轴旋转起来。
一般按6步时序控制,AC、AB、CB、CA、BA、BC,即第1步先从A流到C,B不通,第2步从A
流到B,C不通,依次控制电流方向,电机就旋转起来了。
如果反过来按BC、BA、CA、CB、AB、AC 依次控制电流方向,电机就按相反方向旋转。
控制电路简图:
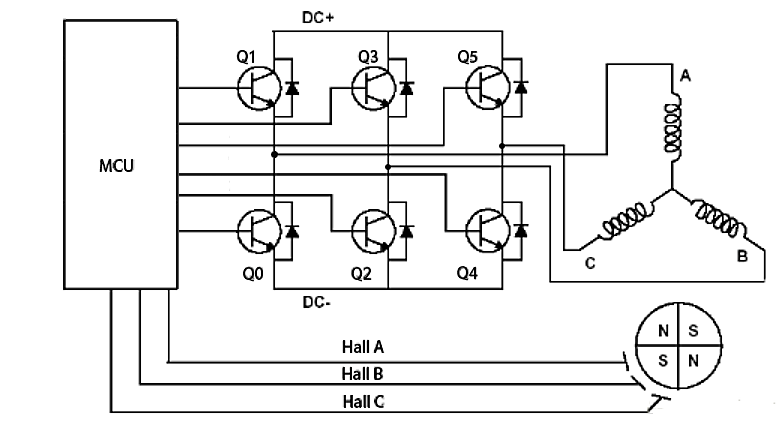
从上图看出,控制第1步AC时,打开Q1、Q4,其它开关管关闭。这样电流从DC+流过Q1,再流过
A、C绕组,经Q4到DC- , 这样就完成第1步电流流向控制,其它步电流控制类似。
无刷电机六步换向中,上桥臂负责产生PWM波,而下桥臂则只需产生高电平和低电平即可。无需
产生PWM波。PWM波的占空比越大平均电流越大。
霍尔传感器的具有两大作用,给控制器内的驱动电路提供位置信号和正反转信号。
通过位置传感器给MCU信号后,MCU进行计算速度、位置,进行逻辑控制。
补充下,上图只是示意说明图,实际上如果Q1-Q6都选用N管的话还需要在MCU和Q1、Q2、Q3之
间加升压驱动才行。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号