STM32定时器之PWM 1路输出 TIM3
以STM32F030F4P6,uVision开发环境为例,注意了,若使用其它相近芯片,本文仅供参考。
以下是main.c文件:
#include "stm32f0xx.h"
void LED_Init(void) //PWM输出引脚B1函数
{
GPIO_InitTypeDef GPIO_InitStructure; //声明GPIO_InitStructure结构变量
// 原版创作,引用请指明出处 https://www.cnblogs.com/beiyhs/p/11406535.html 北有寒山
/* 使能GPIOB时钟 */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE); //使能AHB预分频器到端口B的开关
GPIO_PinAFConfig(GPIOB, GPIO_PinSource1, GPIO_AF_1); //B1复用成TIM3_CH4设置为AF_1
/* 配置LED相应引脚PB1*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //指定脚1输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //指定模式为功能复用
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //指定输出为推挽输出
//GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //内部上拉输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设定端口最快输出50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //按以上参数设置B口
}
void TIM3_PWM_Init(uint16_t period, uint16_t prescaler)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //声明TIM_TimeBaseStructure结构变量
TIM_OCInitTypeDef TIM_OCInitStructure; //声明TIM_OCInitStructure结构变量
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能AHB预分频器到TIM3
TIM_TimeBaseStructure.TIM_Period = period; //设置TIM3自动重装周期值
TIM_TimeBaseStructure.TIM_Prescaler = prescaler; //设置TIM3预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割
TIM_TimeBaseStructure.TIM_CounterMode =TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //按以上参数初始化TIM3
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM2模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse =600; //通道占空比系数
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出低
TIM_OC4Init(TIM3,&TIM_OCInitStructure); //按以上参数初始化TIM3
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
int main(void)
{
LED_Init(); // PWM输出引脚B1函数
TIM3_PWM_Init(1199, 1); // 时钟/PWM初始化函数
while (1)
{}
}
说明:
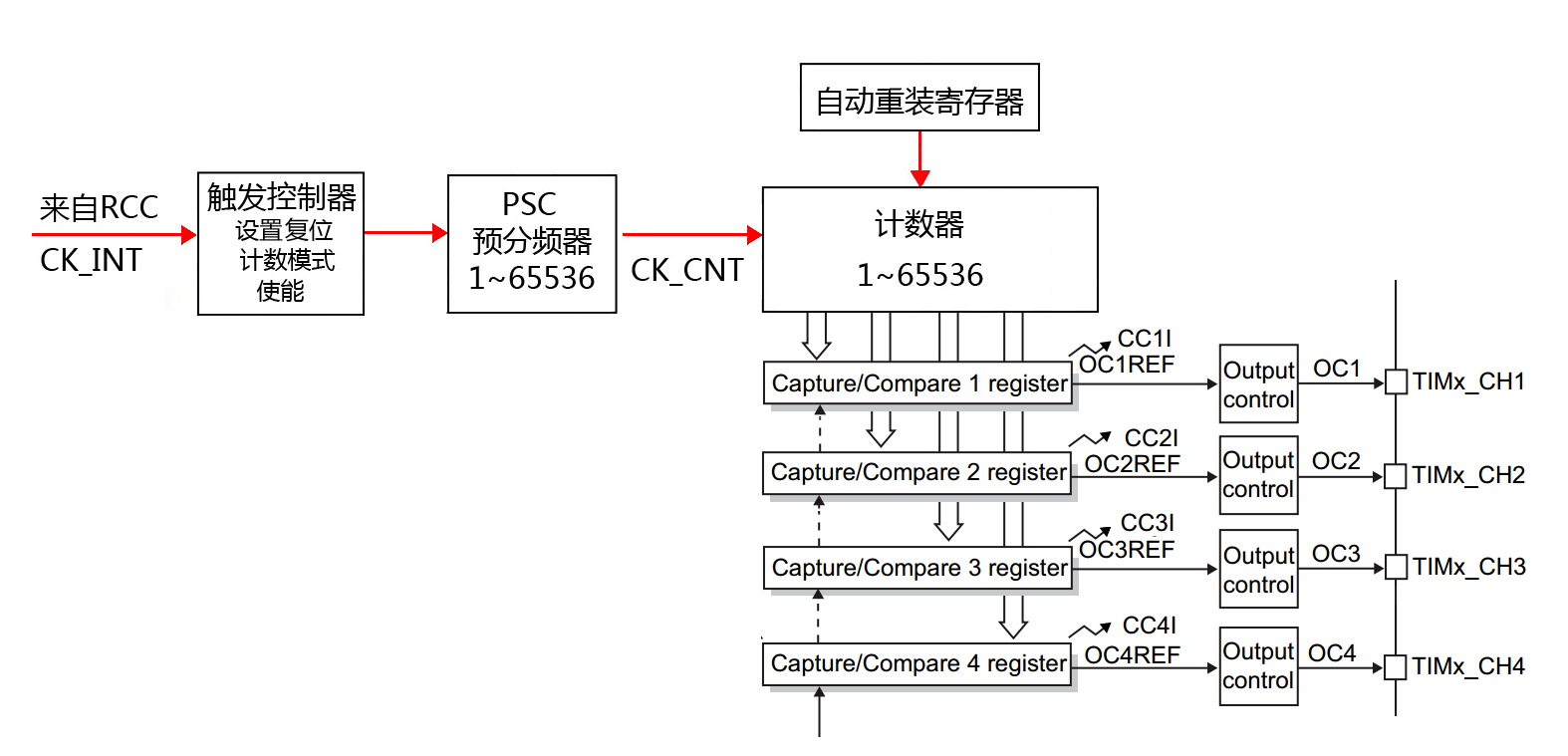
1 TIM3入口频率48MHz,经预分频器分频=prescaler+1=2分频,频率=24MHz;
2 重装周期值=Period+1=1199+1=1200,相当于又分频。频率=24/1200=20KHz;
3 占空比=(TIM_Pulse/Period)*100%=(300/1200)*100%=25%;
4 实测B1脚频率20KHz,占空比25%;
5 因为输出为复用功能,所以IO输出设置要配置成GPIO_Mode_AF_PP,不能配
置成普通输出IO的GPIO_Mode_OUT_PP模式;
6 注意下,B1的PWM输出实际连接的是片上TIM3_CH4通道,而不是B1的IO寄存,
器,如不设置为复用功能,则B1为寄存器驱动的普通IO口。
7 GPIO_OType_PP如换成 GPIO_OType_OD即开漏输出,必须外接上拉电阻,
靠GPIO_PuPd_UP使能内部上拉电阻是输不出高电平的,分析GPIO_OType_OD
会关闭内部上拉电阻。
8 当 TIM_OCPolarity_Low时,使推挽输出上面P管导通,下面N管关闭,IO口输出高,
反之,输出低。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号