
20210222 调试记录
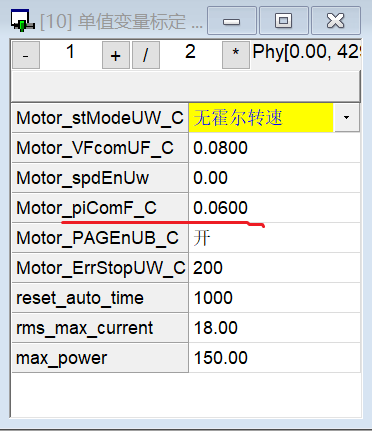
当前的任务 主要是 要把启动时候的转速 降低 发现调节 在VF 切换到 无感控制时候 的 PI 初始值 效果比较明显
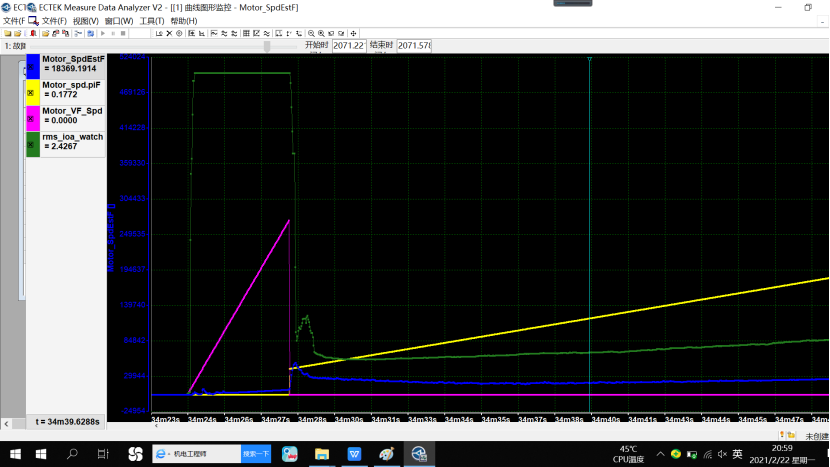
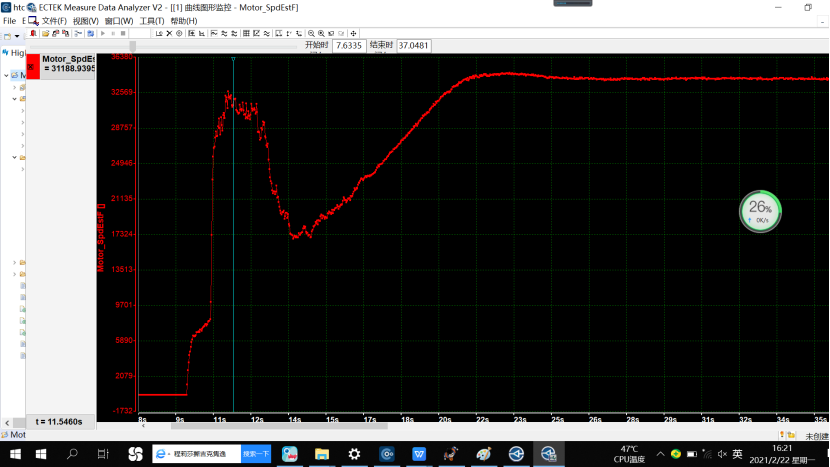
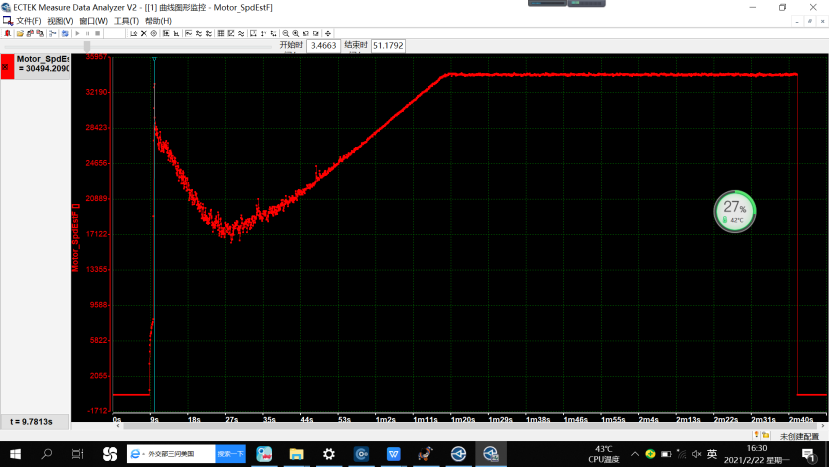
主要是把下图的 VF切换到无感的这个电机转速的过充去掉。其实这个是假的,主要是由于过渡过程中的震荡
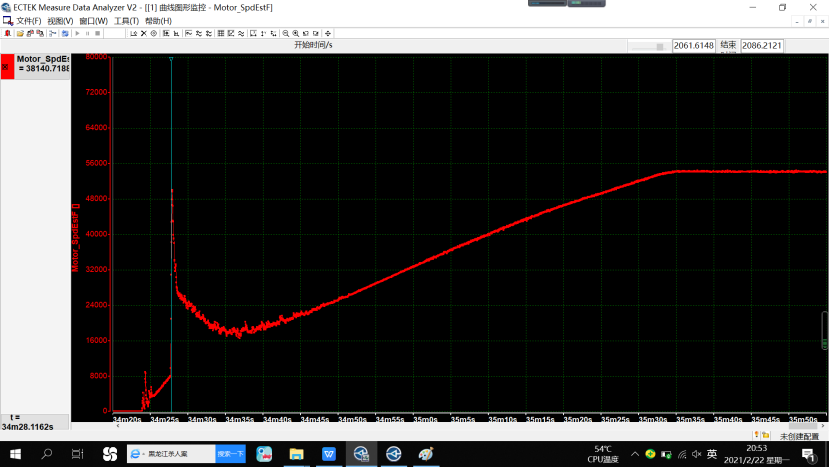
全部图
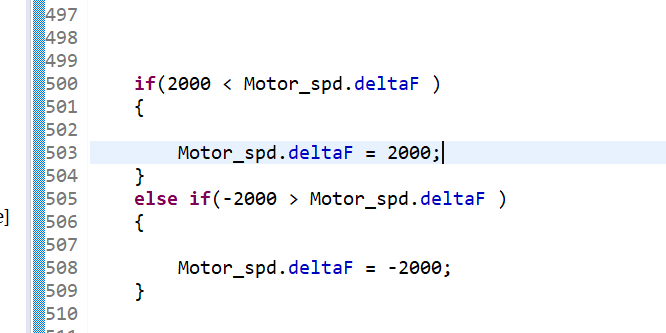
在软启动中 不增加 去掉 下面的 如果切换到 无感控制
并且 给定的转速小于20000 则转速在 给定的20000 的基础上 软起动
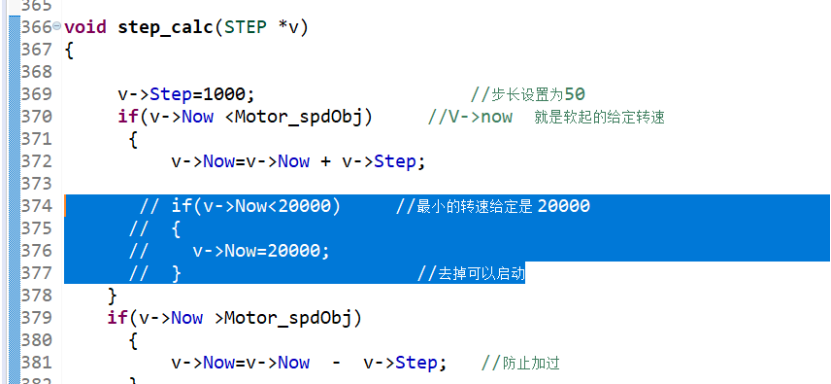
试验证明 步长设为1000 转速 给定30000 可以 正常 启动起来
增加下面的语句实际上就是为了实现 软启动
如果把2000 改为50 启动时间会变更长。
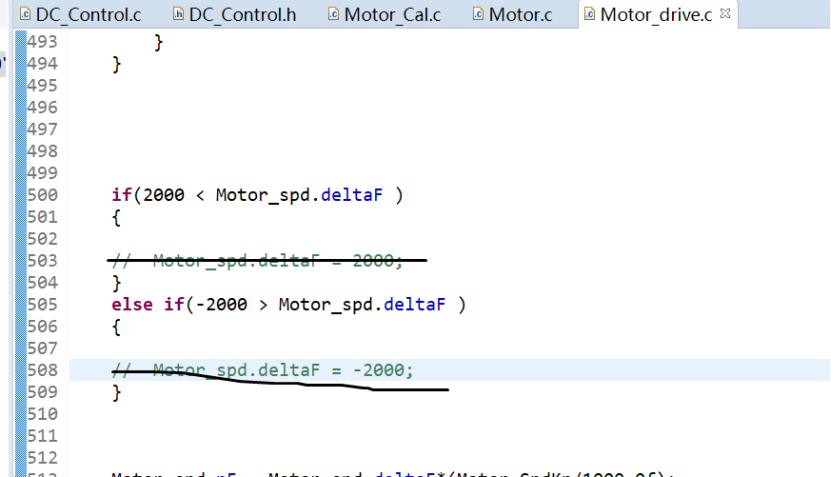
可以正常启动 但是 软启动的效果 不明显。。 实际上 这个就是 软起动
现在 还是 加上 上面的而语句
从 2000 改为 4000
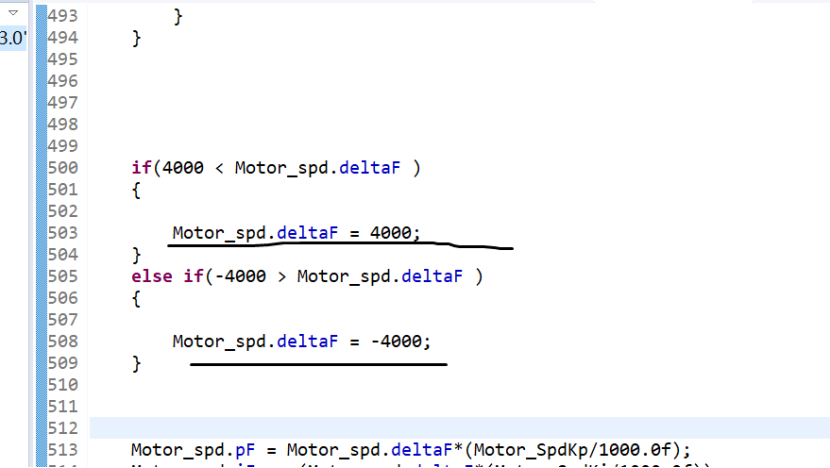
改为 4000 以后 超调是 31180
我现在改为500 之前是2000 这样 软启动的时间更长了

改为500 以后 意义不是很大
所以 我决定把这个 放进 1ms 的循环 中
之前是 放在 10ms 的循环中
放进1ms的循环中去
发现 控制的效果 更烂了 。
感觉这个好像是 在VF 切换到无感的时候 必然有这样一下
该程序的地址 是 20210220

 浙公网安备 33010602011771号
浙公网安备 33010602011771号