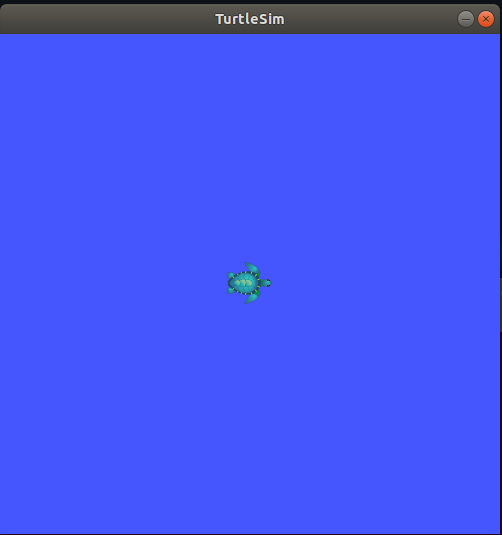
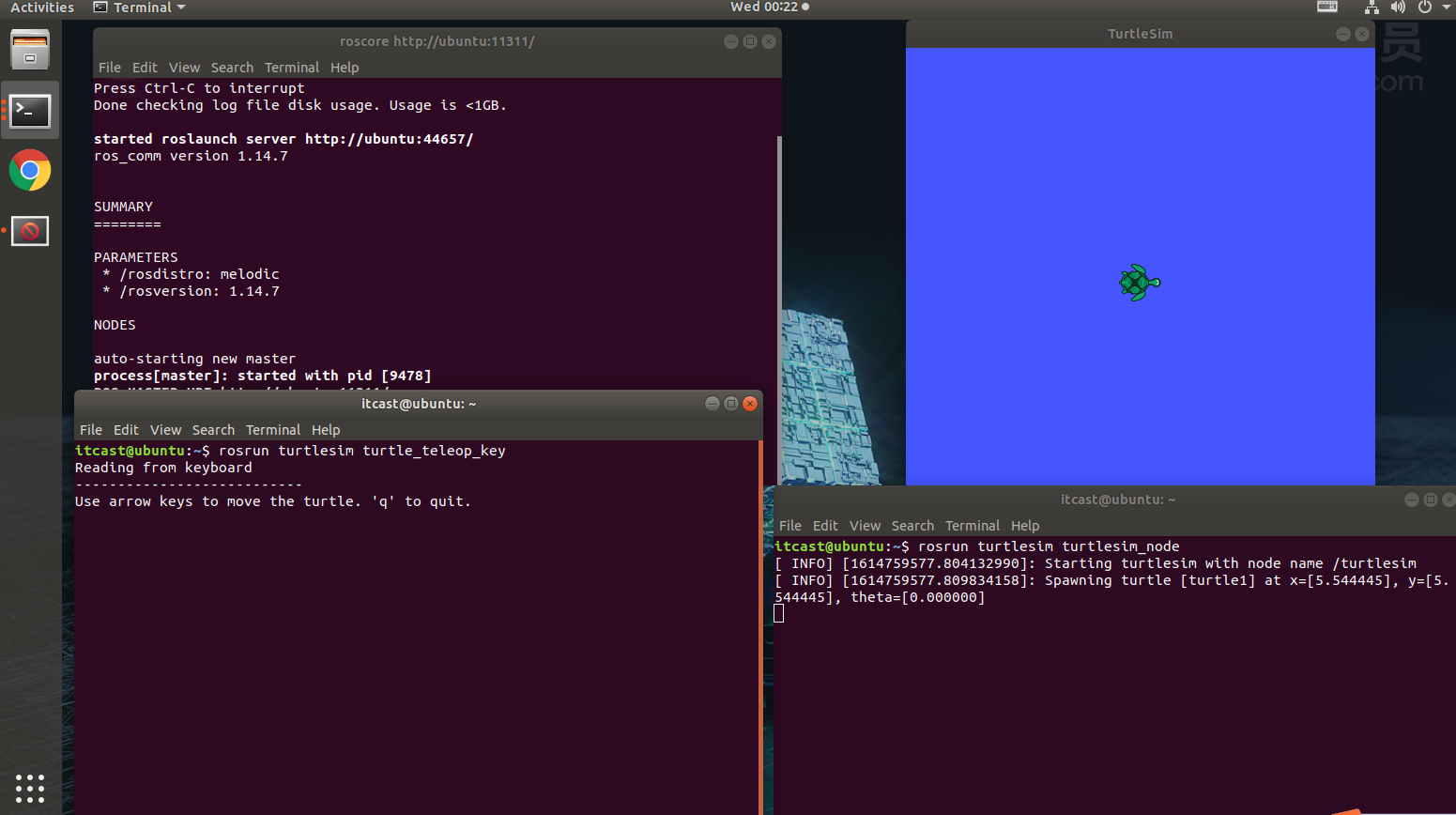
ROS实践-小海龟仿真 启动ROS Master ,启动第一个终端输入:~$ roscore 启动小海龟仿真器,启动第二个终端输入:~$ rosrun turtlesim turtlesim_node 小海龟仿真器界面 启动小海龟控制节点,启动第三个终端输入:~$ rosrun turtlesim turtle_teleop_key 全部界面: 通过控制键盘的上下左右键,来使小海龟运动起来: 第二次:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号