人工智能预习 : 7.2 马尔可夫决策过程
马尔可夫决策过程
太抽象了,这玩意还是拿着例子做做。
马尔可夫决策过程(Markov Decision Process,MDP)严格的描述了强化学习所面临的环境。
在 MDP 中,环境是完全可观测的:当前状态能够完整刻画系统的运行过程。
几乎所有强化学习问题都可以被表示为 MDP:
-
最优控制问题,可以看作处理连续状态和行动的 MDP 问题。
-
部分可观察(Partially Observable)问题,可以转换为面向信念状态(Belief State)的MDP 问题。
-
赌博机(Bandit)问题,可以看作只有一个状态的 MDP 问题。
-
多智能体随机博弈(Stochastic Game)问题,可以近似为智能体与自然博弈的 MDP 问题。
马尔可夫过程 (Markov Process)
随机过程 (Stochastic Process)
随机过程 (Stochastic Process) :随时间演化的一连串随机事件,每个时间点都对应一个可能出现多种取值的随机变量。
概率论的研究对象是静态的随机现象,而随机过程的研究对象是随时间演变的随机现象。
- 例如,天气随时间的变化、城市交通随时间的变化
在随机过程中,随机现象在某时刻 \(t\) 的取值是一个随机变量,用 \(S_t\) 表示。
随机过程可以表示为:\(\{ S_t: t \in T \}\)
已知历史信息 \((S_1, ..., S_t)\) 时,下一个时刻状态为 \(S_{t+1}\) 的概率为
马尔可夫性质 (Markov Property)
马尔可夫性质 (Markov Property):当且仅当任意时刻的状态只取决于上一时刻的状态
-
当前状态是未来的充分统计量,即下一个状态只取决于当前状态,而不会受到过去状态的影响
-
马尔可夫性可以简化运算,只要当前状态可知,所有的历史信息都不再需要了,利用当前状态信息就可以决定未来
状态转移矩阵 (State Transition Matrix) \(\mathcal{P}\)
对一个马尔科夫状态 \(s\) 及其后继状态 \(s'\),状态转移概率 (State Transition Probability) 定义为
\(\mathcal{P}\) 包含从所有状态 \(s\) 到其所有后继状态 \(s'\) 的转移概率
其中矩阵的每一行元素之和都等于 \(1\)。
马尔可夫过程
马尔可夫过程是具有马尔可夫性质的随机过程。
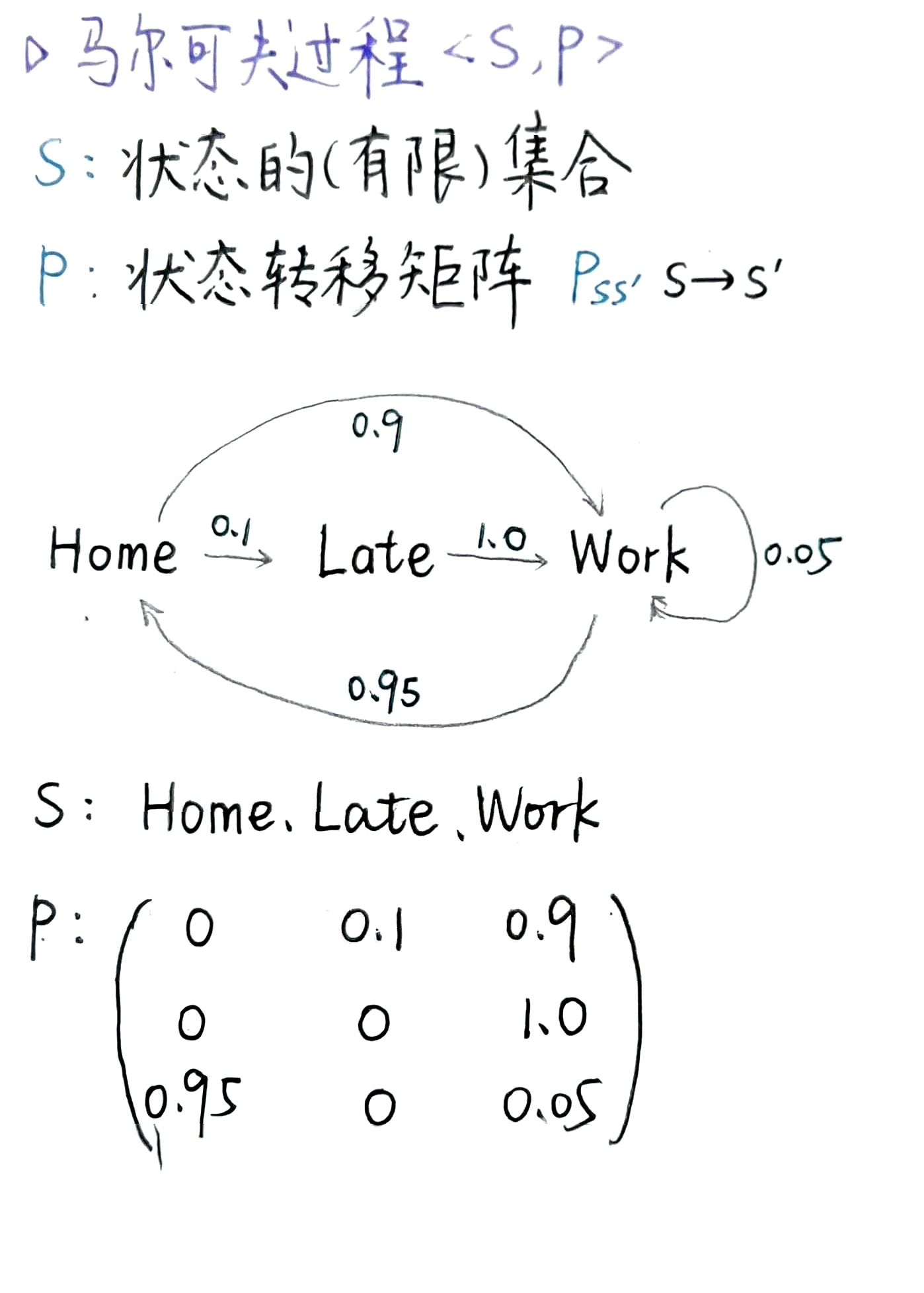
一个 马尔可夫过程 (Markov Process) 或 马尔可夫链 (Markov Chain) 可以表示为一个二元组 \(\langle \mathcal{S}, \mathcal{P} \rangle\),其中:
- \(\mathcal{S}\) 是状态的(有限)集合。
- \(\mathcal{P}\) 是状态转移矩阵,\(P_{ss'} = P(S_{t+1} = s' \mid S_t = s)\)。
示例:通勤问题(详见 PPT )
马尔可夫奖励过程 (Markov Reward Process)
马尔可夫奖励过程
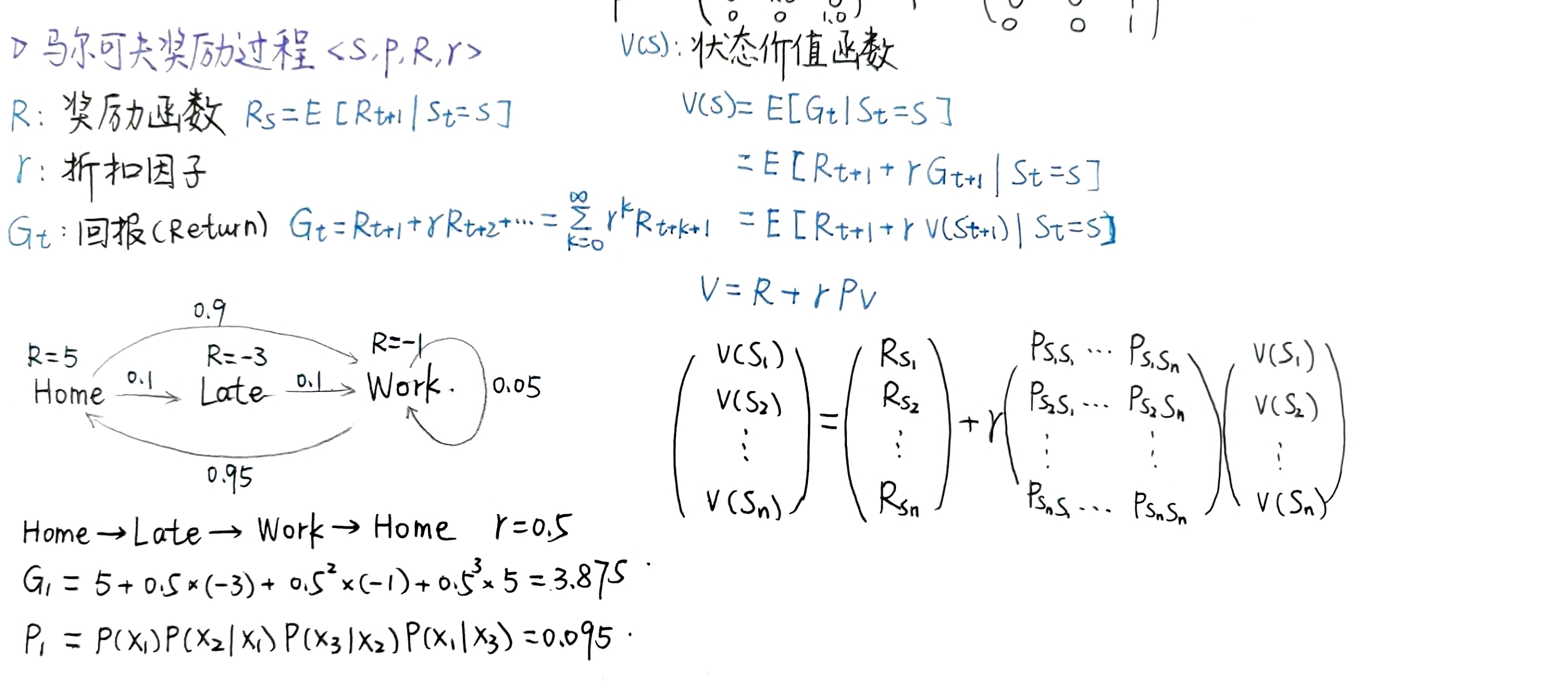
一个马尔可夫奖励过程 (Markov Reward Process, MRP) 可以表示为一个四元组 \(\langle \mathcal{S}, \mathcal{P}, \mathcal{R}, \gamma \rangle\),其中:
- \(\mathcal{S}\) 是状态的(有限)集合。
- \(\mathcal{P}\) 是状态转移矩阵,\(P_{ss'} = P(S_{t+1} = s' \mid S_t = s)\)
- \(\mathcal{R}\) 是奖励函数,\(R_s = \mathbb{E} [R_{t+1} \mid S_t = s]\)
- \(\gamma\) 是折扣因子,\(\gamma \in [0, 1]\)
在马尔可夫链基础上增加了“奖励”
折扣因子的引入 : 远期收益具有一定的不确定性,有时我们更希望能够尽快获得一些奖励,所以对远期收益打一些折扣。
- 接近 \(1\) 的 \(\gamma\) 更关注长期的累计奖励,接近 \(0\) 的 \(\gamma\) 更考虑短期奖励
回报 (Return)
在一个马尔可夫奖励过程(MRP)中,在时间步 \(t\) 开始计算的 回报 (Return) \(G_t\) 指的是从时间步 \(t\) 开始累积的折扣奖励总和:
其中,折扣因子 \(\gamma \in [0,1]\),\(R_t\) 表示在时刻 \(t\) 获得的奖励。
价值函数 (State Value Function)
在一个马尔可夫奖励过程 (MRP) 中, 状态价值函数 (State Value Function) \(v(s)\) 定义为从状态 \(s\) 开始时的期望回报:
\[v(s) = \mathbb{E}[G_t \mid S_t = s] \]
价值函数 \(v(s)\) 表示状态 \(s\) 的长期价值,是从状态 \(s\) 开始的所有可能的马尔可夫链样本序列的回报 期望。
若从状态 \(s\) 开始的所有可能的马尔可夫链样本序列的集合为 \(\mathcal{T}\),则
MRP 的贝尔曼方程(Bellman Equation)
价值函数可以分解为两部分:即时奖励 \(R_{t+1}\) + 后继状态折扣价值 \(\gamma v(S_{t+1})\)
其中,\(v(s)\) 是状态 \(s\) 的价值函数,\(\mathcal{R}_s\) 是状态 \(s\) 的即时奖励,\(\gamma\) 是折扣因子(用于权衡当前与未来奖励),\(\mathcal{P}_{ss'}\) 是从状态 \(s\) 转移到状态 \(s'\) 的概率,\(\mathcal{S}\) 是状态空间。
贝尔曼方程可简洁表示为矩阵形式:
各符号含义:
-
\(\boldsymbol{v}\):列向量,每个元素对应一个状态的价值 \(v(s)\),即 \(\boldsymbol{v} = \begin{bmatrix} v(S_1) \\ \vdots \\ v(S_n) \end{bmatrix}\) 。
-
\(\mathcal{R}\):奖励向量,\(\mathcal{R} = \begin{bmatrix} \mathcal{R}_{S_1} \\ \vdots \\ \mathcal{R}_{S_n} \end{bmatrix}\) ,元素为各状态的即时奖励。
-
\(\mathcal{P}\):状态转移概率矩阵,维度为 \(n \times n\)(\(n\) 为状态数 ),\(\mathcal{P} = \begin{bmatrix} \mathcal{P}_{S_1S_1} & \cdots & \mathcal{P}_{S_1S_n} \\ \vdots & \ddots & \vdots \\ \mathcal{P}_{S_nS_1} & \cdots & \mathcal{P}_{S_nS_n} \end{bmatrix}\) ,元素 \(\mathcal{P}_{ss'}\) 是状态转移概率。
贝尔曼方程是线性方程组,可通过代数变形直接求解:
- 从矩阵形式 \(\boldsymbol{v} = \mathcal{R} + \gamma \mathcal{P} \boldsymbol{v}\) 移项,得:
其中 \(\boldsymbol{I}\) 是单位矩阵。
- 两边同时左乘 \((\boldsymbol{I} - \gamma \mathcal{P})^{-1}\)(若矩阵可逆 ),解得:
求解复杂度与适用场景
-
直接求解限制:当状态数为 \(n\) 时,求逆矩阵的计算复杂度为 \(O(n^3)\) ,因此仅适用于小规模马尔可夫奖励过程(MRP) 。
-
大规模场景方法:面对大规模 MRP,通常用迭代方法近似求解,常见方式有:
- 动态规划(Dynamic Programming)
- 蒙特卡洛评估(Monte-Carlo Evaluation)
- 时序差分学习(Temporal-Difference Learning)
这些迭代方法通过逐步更新价值函数逼近最优解,避免了直接求逆的高复杂度,适配大规模状态空间场景。
马尔可夫决策过程(Markov Decision Process)
马尔可夫决策过程
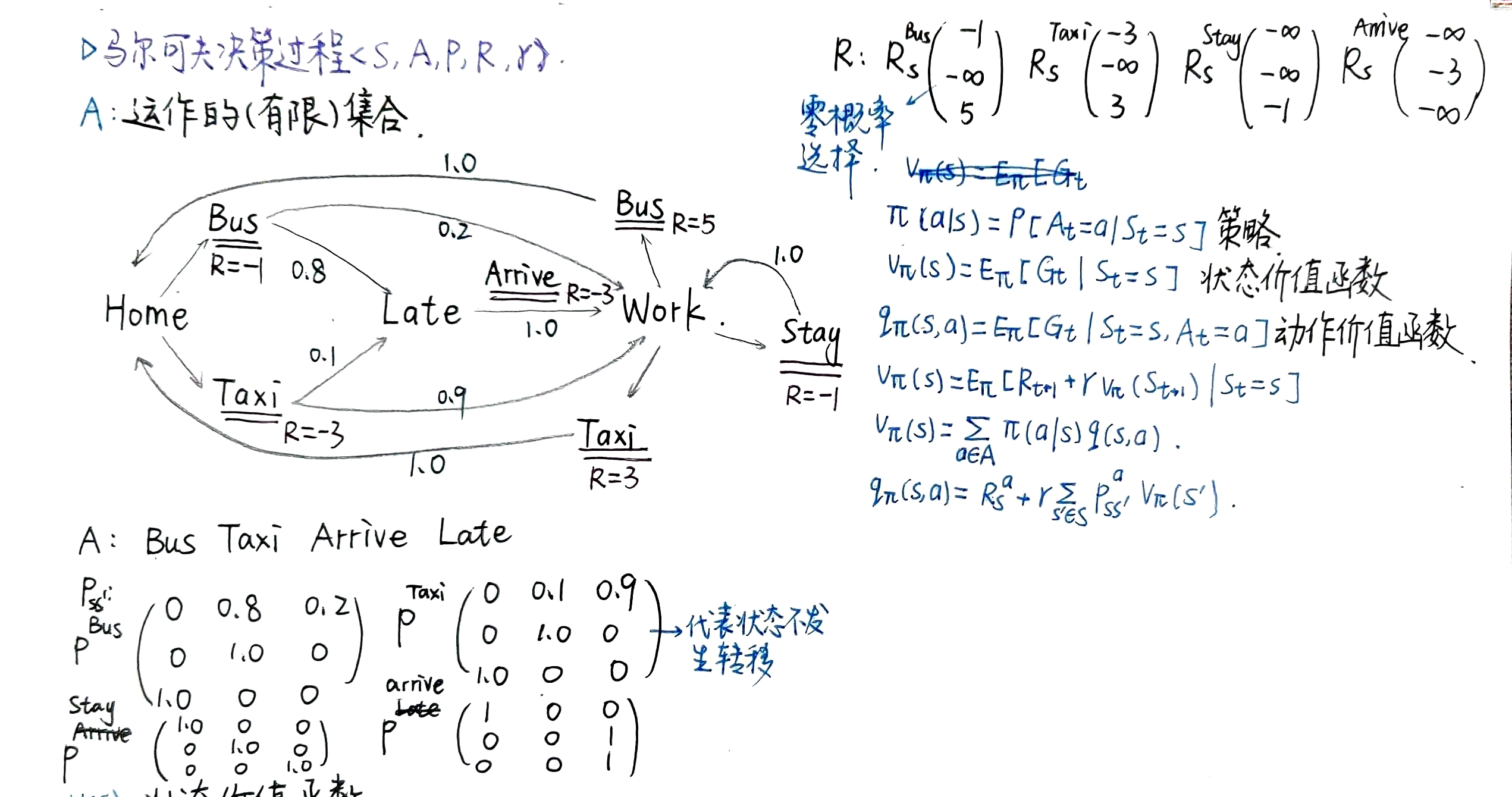
一个马尔可夫决策过程(Markov Decision Process, MDP) 可以表示为一个五元组 \(\langle \mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma \rangle\),其中:
- \(\mathcal{S}\) 是状态的(有限)集合
- \(\mathcal{A}\) 是动作的(有限)集合
- \(\mathcal{P}\) 是状态转移矩阵,\(\mathcal{P}_{ss'}^a = P(S_{t+1} = s' \mid S_t = s, A_t = a)\) ,描述在状态 \(s\) 执行动作 \(a\) 后转移到状态 \(s'\) 的概率
- \(\mathcal{R}\) 是奖励函数,\(\mathcal{R}_s^a = \mathbb{E}[R_{t+1} \mid S_t = s, A_t = a]\) ,表示在状态 \(s\) 执行动作 \(a\) 获得的期望即时奖励
- \(\gamma\) 是折扣因子,\(\gamma \in [0, 1]\) ,用于权衡当前奖励与未来奖励的重要性
马尔可夫决策过程是在马尔可夫奖励过程基础上增加了动作决策
策略
定义
策略(Policy) : \(\pi\) 是在给定状态 \(s\) 时,采取各动作 \(a\) 的概率分布:
\[\pi(a \mid s) = P\left[A_t = a \mid S_t = s\right] \]
性质
-
决定智能体行为:策略完全决定了智能体在马尔可夫决策过程(MDP)中的行为。
-
马尔可夫性(与历史无关):在 MDP 中,策略仅依赖于当前状态,与历史状态序列无关。
-
平稳性(与时间无关):策略是平稳的,即不随时间步变化。对于任意 \(t > 0\),动作 \(A_t\) 的分布满足:
\[A_t \sim \pi(\cdot \mid S_t) \]这意味着策略仅由当前状态 \(S_t\) 决定,与具体时刻 \(t\) 无关。
价值函数
状态价值函数(State Value Function)
在给定策略 \(\pi\) 的 MDP 中,状态价值函数(State Value Function) \(v_\pi(s)\) 表示从状态 \(s\) 开始,随后按照策略 \(\pi\) 行动时的期望回报:
动作价值函数(Action Value Function)
在给定策略 \(\pi\) 的 MDP 中,动作价值函数(Action Value Function) \(q_\pi(s, a)\) 表示从状态 \(s\) 开始,先执行动作 \(a\),然后按照策略 \(\pi\) 行动时的期望回报:
MDP 与 MP 和 MRP 的关系
给定一个马尔可夫决策过程(MDP)\(\mathcal{M} = \langle \mathcal{S}, \mathcal{A}, \mathcal{P}, \mathcal{R}, \gamma \rangle\) 及策略 \(\pi\),存在以下关系:
与马尔可夫过程(MP)的关系
状态序列 \(S_1, S_2, \dots\) 构成马尔可夫过程(Markov Process):\(\langle \mathcal{S}, P^\pi \rangle\)
其中,\(P^\pi\) 是策略 \(\pi\) 下的状态转移概率,定义为:
- \(\pi(a \mid s)\):策略 \(\pi\) 在状态 \(s\) 下采取动作 \(a\) 的概率。
- \(\mathcal{P}^a_{ss'}\):MDP 中状态 \(s\) 执行动作 \(a\) 后转移到 \(s'\) 的概率。
与马尔可夫奖励过程(MRP)的关系
状态-奖励序列 \(S_1, R_2, S_2, \dots\) 构成马尔可夫奖励过程(MRP):\(\langle \mathcal{S}, \mathcal{P}^\pi, \mathcal{R}^\pi, \gamma \rangle\)
其中,\(\mathcal{R}^\pi\) 是策略 \(\pi\) 下的状态奖励,定义为:
- \(\mathcal{R}^a_s\):MDP 中状态 \(s\) 执行动作 \(a\) 获得的即时奖励期望。
矩阵形式的贝尔曼期望方程
借鉴 MDP 与 MRP 之间的关系,贝尔曼期望方程可以使用矩阵形式简洁地表示为:
直接结果为:
其中:
最优价值函数
最优状态价值函数(Optimal State Value Function)
\(v_*(s)\) 是对所有策略的状态价值函数的最大值:
最优动作价值函数(Optimal Action Value Function)
\(q_*(s, a)\) 是对所有策略的动作价值函数的最大值:
最优策略
在策略之间定义偏序关系:
对于任意马尔可夫决策过程(MDP):
- 存在一个最优策略(Optimal Policy) ,它不劣于任何其他策略,即
-
所有最优策略都能实现最优状态价值函数,即
对所有状态 \(s\),\(\displaystyle v_{\pi_*}(s) = v_*(s)\) -
所有最优策略都能实现最优动作价值函数,即
对所有状态 \(s\) 和动作 \(a\),\(\displaystyle q_{\pi_*}(s, a) = q_*(s, a)\)
贝尔曼期望方程和贝尔曼最优方程
\(v_*\) 的贝尔曼最优方程(Bellman Optimality Equation)
\(q_*\) 的贝尔曼最优方程
总结:
部分可观察马尔可夫决策过程(Partially observable MDPs)
当状态不可完全观察时,通过引入观察和观察函数来扩展 MDP
一个部分可观察马尔可夫决策过程(Partially Observable Markov Decision Process, POMDP) 可以表示为一个七元组 \(\langle \mathcal{S}, \mathcal{A}, \mathcal{O}, \mathcal{P}, \mathcal{R}, \mathcal{Z}, \gamma \rangle\),其中:
- \(\mathcal{S}\) 是状态的(有限)集合
- \(\mathcal{A}\) 是动作的(有限)集合
- \(\mathcal{O}\) 是观察的(有限)集合
- \(\mathcal{P}\) 是状态转移矩阵,\(\displaystyle P_{ss'}^a = P(S_{t+1} = s' \mid S_t = s, A_t = a)\)
- \(\mathcal{R}\) 是奖励函数,\(\displaystyle R_s^a = \mathbb{E}[R_{t+1} \mid S_t = s, A_t = a]\)
- \(\mathcal{Z}\) 是观察函数,\(\displaystyle Z_{s'o}^a = P(O_{t+1} = o \mid S_{t+1} = s', A_t = a)\)
- \(\gamma\) 是折扣因子,\(\gamma \in [0, 1]\)
历史(History)
历史(History) \(H_t\) 是动作、观测和奖励构成的序列:
\[H_t = A_0, O_1, R_1, \dots, A_{t-1}, O_t, R_t \]
信念状态(Belief State)
信念状态(Belief State) \(b(h)\) 是在给定历史 \(h\) 的条件下,对所有可能状态的概率分布:
\[b(h) = \big( P[S_t = s^1 \mid H_t = h], \dots, P[S_t = s^n \mid H_t = h] \big) \]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号