高性能计算-GPU并行扫描(28)
1. 扫描概念
- 对数组arr[N]扫描就是得到数组prefix[N],每个元素是之前arr元素的求和.
- 开扫描定义:
prefix1[N] = { arr[0], arr[0]+arr[1], ..., arr[0]+arr[1]+arr[N-1] } - 闭扫描定义:
prefix2[N] = { 0, arr[0], arr[0]+arr[1], ..., arr[0]+arr[1]+arr[N-12}
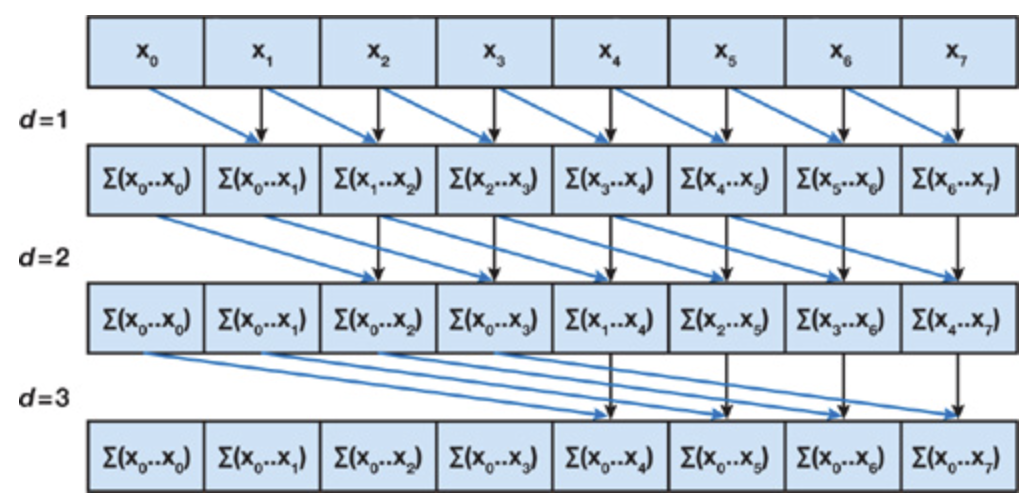
2. Hillis steele 扫描算法
(1)一种闭扫描算法。基础的Hillis steele 扫描算法只能扫描单块,步骤复杂度为 O(logN),任务复杂度为 O(N*logN-(N-1)).
(2)基础版算法介绍:假设步长为s每次迭代 >=s的线程参与计算,本线程id作为被加数,往前 -s 索引为加数
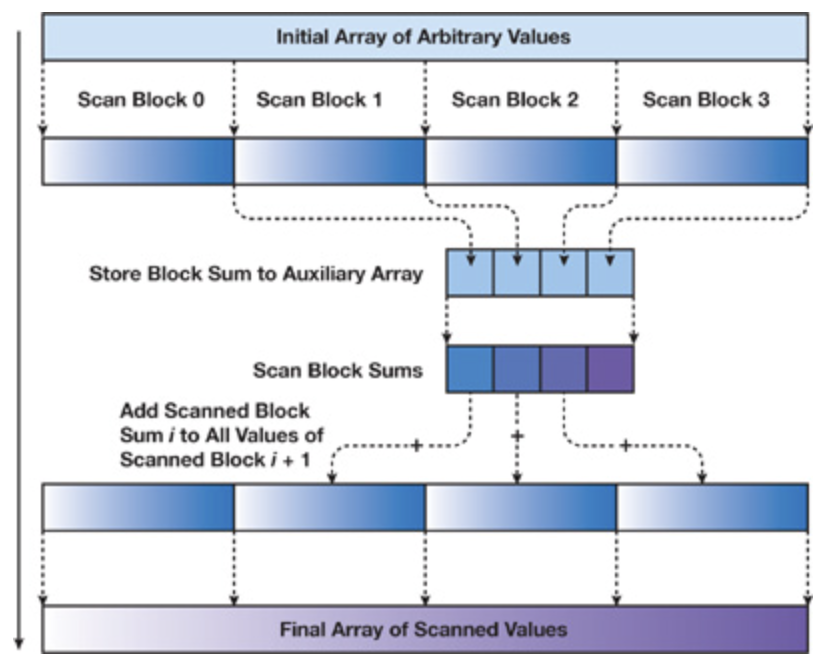
(3)支持任意block倍数长度的数据输入,介绍:a) 扫描block:按blocksize划分数据,每个block处理一个数据块,块内进行扫描,输出规约结果数组,并将最后一个块内和元素按 blockid 保存到辅助数组;
b) 递归闭扫描辅助数组:递归为了将块内求和辅助数组的结果加到块内扫描结果上,需要扫描辅助数组,如果辅助数组大于256那么要考虑辅助数组递归扫描;直到辅助数组被扫描求和数组block为1,扫描结束,反向依次弹栈把求和数组加到 block+1 的扫描结果数组上。
(4)优化:共享内存使用双buffer,读写分离,避免读写 bank冲突
(5)代码:
/*
任意长度扫描,单块扫描使用Hillis Steele算法,使用double buffer避免读写bank冲突;默认输入数据长度是blockSize的倍数
*/
#include "common.h"
#include <stdio.h>
#define BlockSize 512
//单块扫描函数, in 输入数据, out 扫描结果, len1 扫描数据长度,sum block求和数组,len2 sum数组大小
__global__ void kernel_BlockScan(int *in,int * out,int len1,int *sum,int len2)
{
//取单块数据到共享内存,使用双buffer,读写分离,避免读写bank冲突
__shared__ int arrShared[2*BlockSize];
int bid = blockIdx.x; //块id
int tid = blockIdx.x * blockDim.x + threadIdx.x; //全局线程id
int tbid = threadIdx.x; //块内线程id
int write = 0; //初始化第0个buff write
int read = 1; //初始化第1个buff read
if(tid<len1)
{
//共享内存read buffer数据初始化
arrShared[read*BlockSize + tbid] = in[tid];
__syncthreads();
for(int s=1;s<BlockSize;s<<=1)
{
// Hillis Steele算法:索引大于步长的线程参与计算,对应位置上的倍加数+块内前面步长位置的加数
if(tbid>=s)
{
//被加数索引
int id = read*BlockSize + tbid;
arrShared[write*BlockSize + tbid] = arrShared[id] + arrShared[id -s];
}
else//否则保留上一轮计算的前缀和
arrShared[write*BlockSize + tbid] = arrShared[read*BlockSize + tbid];
//每循环一次,读写buffer区域交换
__syncthreads();
write = 1 - write;
read = 1- read;
}
// 将block计算结果赋值给out
out[tid] = arrShared[read*BlockSize + tbid];
//将块内求和按块索引号放求和数组
if(tbid==(BlockSize-1))
sum[bid] = arrShared[read*BlockSize + tbid];
}
}
//对第一轮扫描结果后处理函数,len 数据总长度
__global__ void handPost(int* first,int len,int *second)
{
int tid = blockDim.x * blockIdx.x + threadIdx.x;
int bid = blockIdx.x;
int tbid = threadIdx.x; //块内线程id
//从第二块开始加上前一个块的sum值
if(bid>0 && tid<len)
{
//取出被加数
__shared__ int temp;
if(tbid==0)
temp = second[bid-1];
__syncthreads();
first[tid] += temp;
}
}
//输入分块扫描分配及后处理函数,输出结果的空间在外面分配
//这里第一二轮扫描都使用该函数递归调用,n输入数据长度
void scan(int *in,int *arrResult,int n)
{
int GridSize = (n-1)/BlockSize + 1;
printf("gridSize:%d\n",GridSize);
int *arrResultFirstSum;
CudaSafeCall(cudaMalloc((void**)&arrResultFirstSum,GridSize*sizeof(int)));
kernel_BlockScan<<<GridSize,BlockSize,2*BlockSize*sizeof(int)>>>(in,arrResult,n,arrResultFirstSum,GridSize);
CudaCheckError();
//循环扫描递归终止条件:假如第一次扫描gridsize=4096大于256,组要循环扫描到 gridsize==1,block的和需要被handpost处理累加到后面
if(GridSize==1)
{
cudaFree(arrResultFirstSum);
return;
}
//递归扫描:对本轮计算结果和的数组进行扫描
int *arrResultSecond;
//cudaMalloc 隐式同步
CudaSafeCall(cudaMalloc((void**)&arrResultSecond,GridSize*sizeof(int)));
scan(arrResultFirstSum,arrResultSecond,GridSize);
//空流核函数隐式同步
// cudaDeviceSynchronize();
//将本轮扫描结果数组的索引+1作为第一次扫描结果按blockIdx.x的索引作为块内扫描结果的加数,得到最终扫描结果arrResult
handPost<<<GridSize,BlockSize,sizeof(int)>>>(arrResult,n,arrResultSecond);
CudaCheckError();
//cudafree是隐式同步
CudaSafeCall(cudaFree(arrResultFirstSum));
CudaSafeCall(cudaFree(arrResultSecond));
return;
}
int main(int argc ,char** argv)
{
int N = 1<<20; //数据规模
if(argc>1)
N = 1 << atoi(argv[1]);
//cpu串行计算
int *arrHost = (int*)calloc(N,sizeof(int));
int *resultHost = (int*)calloc(N,sizeof(int));
int *resultFD = (int*)calloc(N,sizeof(int));
float cpuTime = 0.0;
initialDataInt(arrHost,N);
double start = cpuSecond();
//闭扫描
//初始化第一个元素,避免循环内有判断,cpu分支预测错误
resultHost[0] = arrHost[0];
for(int i=1;i<N;i++)
resultHost[i] = resultHost[i-1] + arrHost[i];
double end = cpuSecond();
cpuTime = (end - start)*1000;
//gpu计算
int *arrD;
int *resultD;
float gpuTime = 0.0;
CudaSafeCall(cudaMalloc((void**)&arrD,N*sizeof(int)));
CudaSafeCall(cudaMalloc((void**)&resultD,N*sizeof(int)));
cudaEvent_t startD,endD;
CudaSafeCall(cudaEventCreate(&startD));
CudaSafeCall(cudaEventCreate(&endD));
CudaSafeCall(cudaMemcpy(arrD,arrHost,N*sizeof(int),cudaMemcpyHostToDevice));
cudaEventRecord(startD);
scan(arrD,resultD,N);
CudaCheckError();
cudaEventRecord(endD);
cudaEventSynchronize(endD);
CudaSafeCall(cudaMemcpy(resultFD,resultD,N*sizeof(int),cudaMemcpyDeviceToHost));
cudaEventElapsedTime(&gpuTime,startD,endD);
cudaEventDestroy(startD);
cudaEventDestroy(endD);
//结果比对
checkResultInt(resultHost,resultFD,N);
free(arrHost);
free(resultHost);
free(resultFD);
CudaSafeCall(cudaFree(arrD));
CudaSafeCall(cudaFree(resultD));
printf("数据规模 %d kB,cpu串行耗时 %.3f ms ;gpu 单个block使用Hillis Steele 扫描(double buffer)计算耗时 %.3f ms,加速比为 %.3f .\n",N>>10,cpuTime,gpuTime,cpuTime/gpuTime);
return 0;
}
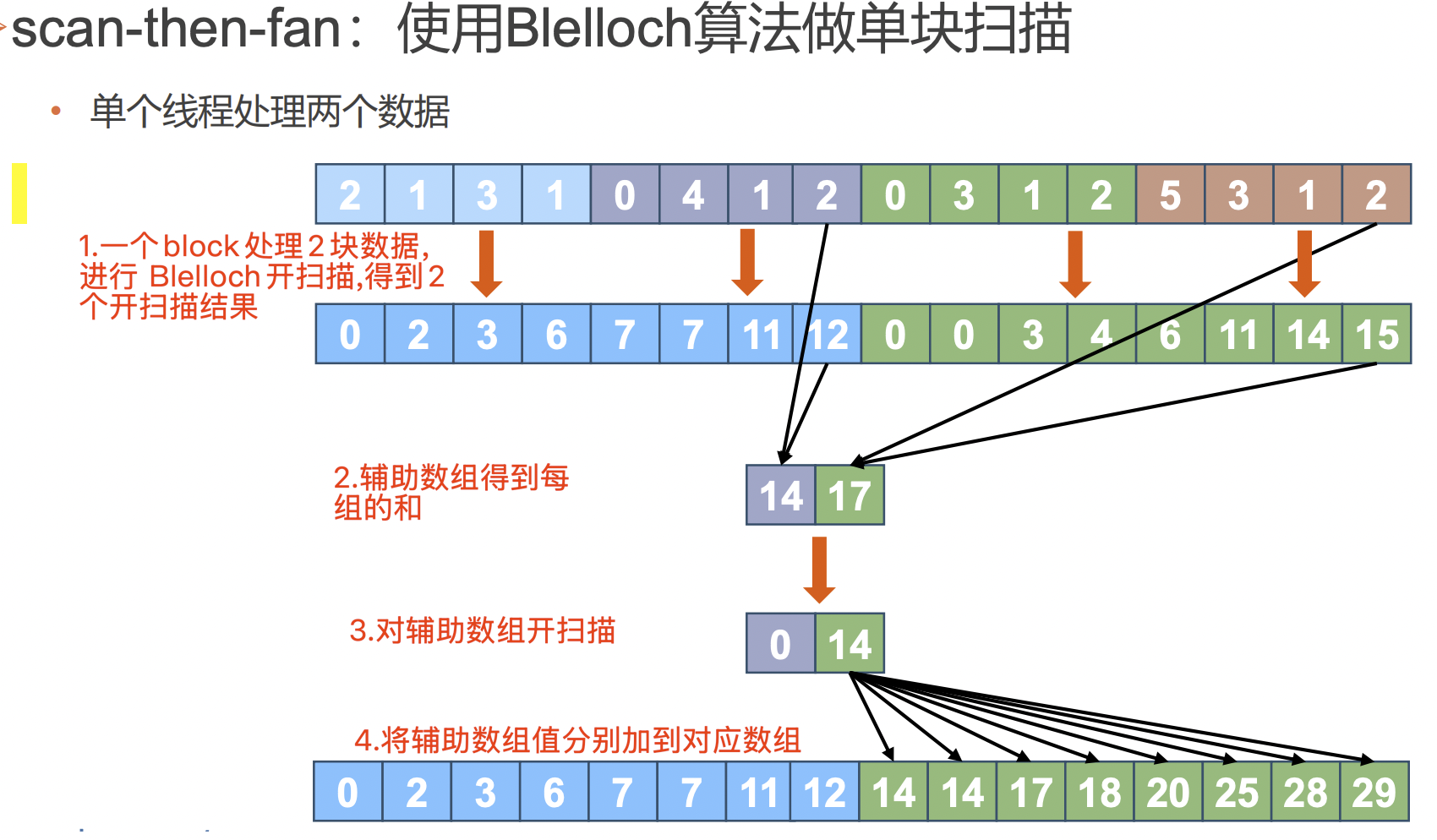
3. Blelloch扫描算法
(1)一种开扫描算法。基础的 Blelloch扫描算法,只能处理单块数据。步骤复杂度为 O(2logN),任务复杂度为 O(2N)。
(2)基础版算法介绍:a) 规约:对块进行规约,每次循更新计算结果的位置的数值,其他数值不变。
b) 清零和散出:
- 清零:最后一个元素置为0
- 散出:假设数据长度为blocksize ,迭代循环步长为 s = blocksize/2 ,最后一个元素 E1,与向前s的元素 E2相加,结果放在 E1位置,并将原数据 E1放在 E2位置;每轮循环步长减半。


(3)支持任意block倍数长度的数据输入,介绍:
a)开扫描block:按blocksize划分数据,每个block处理一个数据块,块内进行扫描,输出前缀和和块内求和结果辅助数组
b) 递归开扫描辅助数组:递归为了将块内求和辅助数组的结果加到块内扫描结果上,需要扫描辅助数组,如果辅助数组大于256那么要考虑辅助数组递归扫描;直到辅助数组被扫描求和数组block为1,扫描结束,反向依次弹栈把求和数组加到对应 block前缀数组上(此处与Hillis steele不同)。
(4)优化
- 块内共享内存每个warp后添加一个padding位,避免访存 bank冲突
- 扫描核函数内规约和散出阶段根据步长计算需要线程的数量,只让小于该数量的块内线程id参与计算
(5)代码
/*
使用blelloch 算法对任意长度(blocksize的倍数)做开扫描
// 优化:
1.存放数据:共享内存每32个数据添加一个padding,避免 bank冲突;
2.读取数据:handPost 现成处理的数据
3.扫描核函数内规约和散出阶段根据步长计算需要线程的数量,只让小于该数量的块内线程id参与计算
*/
#include "common.h"
#include <stdio.h>
#define BlockSize 512
#define WarpSize 32
#define ADD_PADDING_MEM(A) ((A)+((A)>>5)) //根据原数据的索引计算机padding 后的索引;或者输入原数据大小,获取padding后的大小
//单块扫描函数, in 输入数据, out 扫描结果, len1 扫描数据长度,sum block求和数组,len2 sum数组大小
__global__ void kernel_BlockScan(int *in,int * out,int len1,int *sum,int len2)
{
int bid = blockIdx.x;
// int tid = blockIdx.x * blockDim.x + threadIdx.x;
int btid = threadIdx.x;
//取数据到共享内存,一个块计算2个快的数据
//优化:每32个数据添加一个padding数据位,防止bank冲突
__shared__ int arrShared[ADD_PADDING_MEM(2*BlockSize)];
//每个线程取第一个数
if(2*(BlockSize*bid+btid) < len1)
arrShared[ADD_PADDING_MEM(2*btid)] = in[2*(BlockSize*bid+btid)];
//取第二个数
if(2*(BlockSize*bid+btid)+1 < len1)
arrShared[ADD_PADDING_MEM(2*btid+1)] = in[2*(BlockSize*bid+btid)+1];
//保留最后一个值,避免最后再次访存
int lastValue = 0;
//如果用其他线程保存数据,应先同步,保证最后一个线程访存之后再保存
if(btid == BlockSize-1)
lastValue = arrShared[ADD_PADDING_MEM(2*BlockSize-1)];
__syncthreads();
//规约
//优化:减少线程束分化,由于计算的结果保存原共享内存,计算数据的位置分配计算线程从0号开始,将计算结果放入对应位置,节约了线程束的需求
for(int s=1;s<=BlockSize;s<<=1)
{
//根据步长计算本轮需要的线程数量
if(btid<(2*BlockSize)/(2*s))
{
// 根据步长和计算线程索引,得到被加数索引
int index = 2*s*(btid+1)-1;
//减少线程束优化,根据需要的线程数量
if(index<2*BlockSize)
arrShared[ADD_PADDING_MEM(index)] += arrShared[ADD_PADDING_MEM(index-s)];
}
//防止空闲线程进行下一轮计算
__syncthreads();
}
//最后一个结果清0
if(btid == 0)
arrShared[ADD_PADDING_MEM(2*BlockSize-1)] = 0;
__syncthreads();
// down sweep
for(int s=BlockSize;s>0;s>>=1)
{
//根据步长计算本轮需要的线程数量
if(btid<(2*BlockSize)/(2*s))
{
//根基 btid和步长计算出被加数索引
int index = 2*s*(btid+1)-1;
int addSecondIndex = ADD_PADDING_MEM(index);
int addFirstIndex = ADD_PADDING_MEM(index-s);
int temp = arrShared[addSecondIndex];
arrShared[addSecondIndex] += arrShared[addFirstIndex];
arrShared[addFirstIndex] = temp;
}
//防止空闲线程进行下一轮计算
__syncthreads();
}
//保存开扫描结果
//保存线程对应第一个位置数据
int addFirstIndex = 2*(bid*BlockSize+btid);
int addSecondIndex = addFirstIndex+1;
out[addFirstIndex] = arrShared[ADD_PADDING_MEM(2*btid)];
out[addSecondIndex] = arrShared[ADD_PADDING_MEM(2*btid+1)];
//block求和结果放入辅助数组
if(btid == BlockSize-1)
sum[bid] = lastValue + arrShared[ADD_PADDING_MEM(2*BlockSize-1)];
}
//对第一轮扫描结果后处理函数,len 数据总长度
__global__ void handPost(int* first,int len,int *second)
{
int tid = blockIdx.x * blockDim.x + threadIdx.x;
int btid = threadIdx.x;
int bid = blockIdx.x;
int wid = tid/WarpSize; //warpid
int wtid = tid%WarpSize; //warp内线程id
//开扫描辅助数组第一个值为0,该索引块不参与计算
if(bid>0)
{
//这里有bank冲突:如果一个线程处理相邻数据,0和16线程在bank0和bank1双路冲突
//优化: 一个warp计算两个warp大小的数据,一个线程取的两个数据偏移warp大小,可以避免bank冲突
__shared__ int secondValue;
if(btid==0)
secondValue = second[bid];
__syncthreads();
first[wid*2*WarpSize+wtid] += secondValue;
first[wid*2*WarpSize+wtid+WarpSize] += secondValue;
}
//没有依赖可以不同步
}
//输入分块扫描分配及后处理函数,输出结果的空间在外面分配
//这里第一二轮扫描都使用该函数递归调用,n输入数据长度
void scan(int *in,int *arrResult,int n)
{
int GridSize = (n-1)/(2*BlockSize) + 1;
// printf("gridSize:%d\n",GridSize);
int *arrResultFirstSum;
CudaSafeCall(cudaMalloc((void**)&arrResultFirstSum,GridSize*sizeof(int)));
kernel_BlockScan<<<GridSize,BlockSize,ADD_PADDING_MEM(2*BlockSize)*sizeof(int)>>>(in,arrResult,n,arrResultFirstSum,GridSize);
CudaCheckError();
//循环扫描递归终止条件:假如第一次扫描gridsize=4096大于256,组要循环扫描到 gridsize==1,block的和需要被handpost处理累加到后面
if(GridSize==1)
{
cudaFree(arrResultFirstSum);
return;
}
//二次扫描:对本轮计算结果和的数组进行开扫描
int *arrResultSecond;
//cudaMalloc 隐式同步
CudaSafeCall(cudaMalloc((void**)&arrResultSecond,GridSize*sizeof(int)));
scan(arrResultFirstSum,arrResultSecond,GridSize);
//空流核函数隐式同步
// cudaDeviceSynchronize();
//将二轮开扫描结果按数组索引加到对应索引块的第一轮扫描结果上,得到最终扫描结果arrResult
handPost<<<GridSize,BlockSize,sizeof(int)>>>(arrResult,n,arrResultSecond);
CudaCheckError();
//cudafree是隐式同步
CudaSafeCall(cudaFree(arrResultFirstSum));
CudaSafeCall(cudaFree(arrResultSecond));
return;
}
int main(int argc ,char** argv)
{
int N = 1<<20; //数据规模
if(argc>1)
N = 1 << atoi(argv[1]);
//cpu串行计算
int *arrHost = (int*)calloc(N,sizeof(int));
int *resultHost = (int*)calloc(N,sizeof(int));
int *resultFD = (int*)calloc(N,sizeof(int));
initialDataInt(arrHost,N);
double start = cpuSecond();
//闭扫描
//初始化第一个元素,避免循环内有判断,cpu分支预测错误
resultHost[0] = 0;
for(int i=1;i<N;i++)
resultHost[i] = resultHost[i-1] + arrHost[i-1];
double cpuTime = (cpuSecond()-start)*1000;
//gpu计算
int *arrD;
int *resultD;
float gpuTime = 0.0;
CudaSafeCall(cudaMalloc((void**)&arrD,N*sizeof(int)));
CudaSafeCall(cudaMalloc((void**)&resultD,N*sizeof(int)));
cudaEvent_t startD,endD;
CudaSafeCall(cudaEventCreate(&startD));
CudaSafeCall(cudaEventCreate(&endD));
CudaSafeCall(cudaMemcpy(arrD,arrHost,N*sizeof(int),cudaMemcpyHostToDevice));
cudaEventRecord(startD);
scan(arrD,resultD,N);
CudaCheckError();
cudaEventRecord(endD);
cudaEventSynchronize(endD);
CudaSafeCall(cudaMemcpy(resultFD,resultD,N*sizeof(int),cudaMemcpyDeviceToHost));
cudaEventElapsedTime(&gpuTime,startD,endD);
cudaEventDestroy(startD);
cudaEventDestroy(endD);
//结果比对
checkResultInt(resultHost,resultFD,N);
free(arrHost);
free(resultHost);
free(resultFD);
CudaSafeCall(cudaFree(arrD));
CudaSafeCall(cudaFree(resultD));
printf("数据规模 %d kB,cpu串行耗时 %.3f ms ;gpu 单个block使用Blelloch 扫描计算耗时 %.3f ms,加速比为 %.3f .\n",N>>10,cpuTime,gpuTime,cpuTime/gpuTime);
return 0;
}
4. 测试数据
| 扫描算法 | 串行(ms) | gpu并行(ms) | 加速比 |
|---|---|---|---|
| Hillis steele (0.1M数据) | 0.003 | 0.2 | 0.015 |
| Blelloch (0.1M数据) | 0.005 | 0.131 | 0.038 |
| thrust库 (0.1M数据) | - | 0.16 | 0.025 |
| Hillis steele (1M数据) | 5.363 | 1.947 | 2.754 |
| Blelloch (1M数据) | 5.593 | 2.047 | 2.732 |
| thrust库 (1M数据) | - | 0.39 | 13.850 |
| Hillis steele (25M数据) | 146.608 | 10.376 | 14.129 |
| Blelloch (25M数据) | 149.882 | 11.981 | 12.510 |
| thrust库 (25M数据) | - | 0.62 | 238.000 |
备注:thrust 的时间包主机与GPU的内存拷贝,测试代码不包含内存拷贝耗时。
5. 结果分析
(1) Hillis steele 比 Belloch扫描算法的效率分析,Hillis steele的任务复杂度大于Blelloch,Blelloch的步骤复杂度大于Hillis steele:
扫描算法 步骤复杂度 任务复杂度 Hillis steele O(logN) O(N*logN-(N-1)) Blelloch O(2logN) O(2N)
(2) 耗时分析
- 当数据量较小时串行效率最高,
- 当数据量较大时 Hillis steele 比 Belloch算法更高效,并且cuda thrust的效率极高
(3) 算法选择策略:
- 理论上:当数据规模大于核心数量时,应选用任务总量少,步骤多的算法比如 Blelloch ;当数据规模小于核心数量时应选用计算任务总量多,将计算分摊到更多的核心上,步骤少的算法比如 Hillis steele。
- 实际测试中:无论数据规模大还是小 Hillis steele 都比 Belloch 算法高效,使用 nvprof 分析后发现 Belloch 扫描核函数的步骤过多,对效率影响较大,应进一步改进。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号