用例建模Use Case Modeling
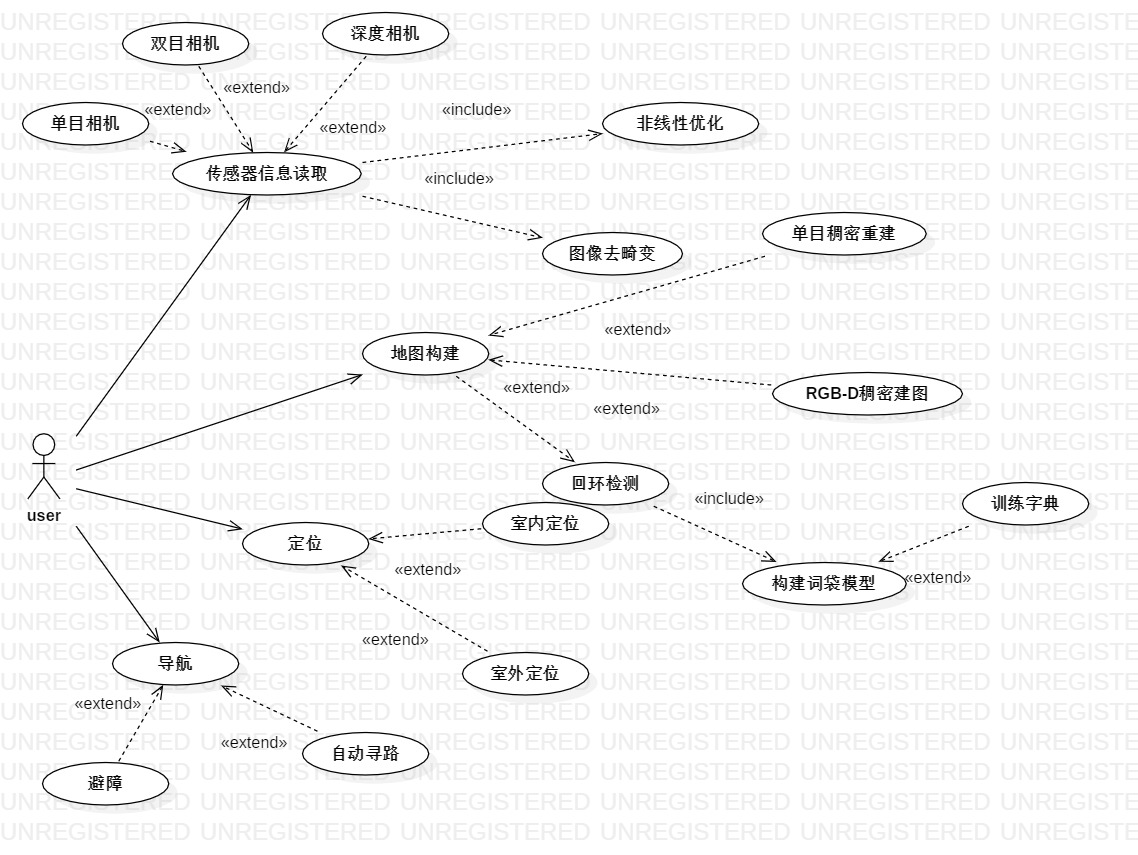
我的工程实践题目是基于VSLAM算法的室内地图三维重建系统设计,使用ORBSLAM/MononSLAM等视觉SLAM算法,实现单目视觉里程计、地图构建和拼接,完成周边环境的3D点云地图实时重建。下面是以我的工程实践为例,对业务进行建模的用例图。
<< include >> 表示子用例是父用例的一部分,通常强调离开这个特性,父用例无法达成目标或失去意义!
<< extend >> 表示子用例是父用例的可选场景或技术特征。
<< include >> 箭头指向子用例;<< extend >> 箭头指向父用例。箭头表示的依赖关系!
1.Abstract use case
2.High level use case
根据地图三维重建系统的工作流程,可分为:传感器信息读取、地图构建、定位、导航。
3.Expanded use case
传感器信息读取:在视觉SLAM中主要为相机图像信息的读取和预处理,如果在机器人中还可能有码盘,惯性传感器等信息的读取和同步。
地图构建:它根据估计的轨迹,建立与任务要求对应的地图
定位:分为室内定位和室外定位,环境不同所采取的算法也不同。
导航:在构建完地图的基础上,加上自身的定位系统,便可以实现导航。也可以实现自动寻路和避障的功能。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号