多传感器融合简单理解
转自知乎https://zhuanlan.zhihu.com/p/1890560363528975656
侵权删
数据级融合(早期融合)
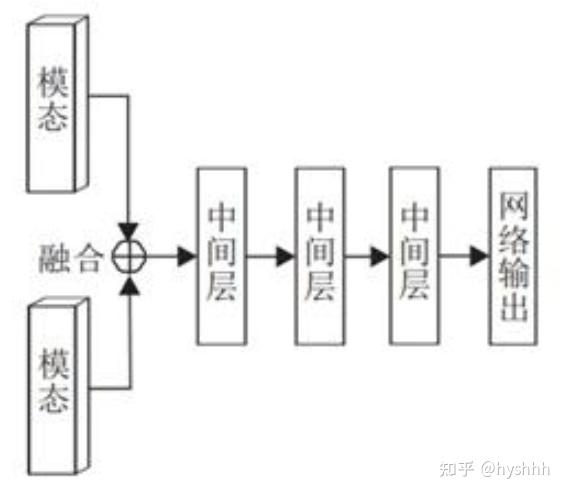
概念:在数据层面进行融合,即直接将来自不同传感器的原始数据进行组合,形成一个统一的输入。
特点:
在点云+图像融合中,通常是将图像的颜色信息(RGB)与 LiDAR 点云对齐,以增强点云信息。
适用于深度学习方法,可以利用神经网络自动学习特征。
优点:
✔️ 能最大化利用原始数据的信息,提供丰富的特征表达能力。
✔️ 适用于深度学习方法,如 BEVFusion、PointPainting 等。
缺点:
❌ 需要严格的时间同步和空间对齐,计算量大。
❌ 受传感器精度、数据质量等因素影响较大。
特征级融合(中期融合)
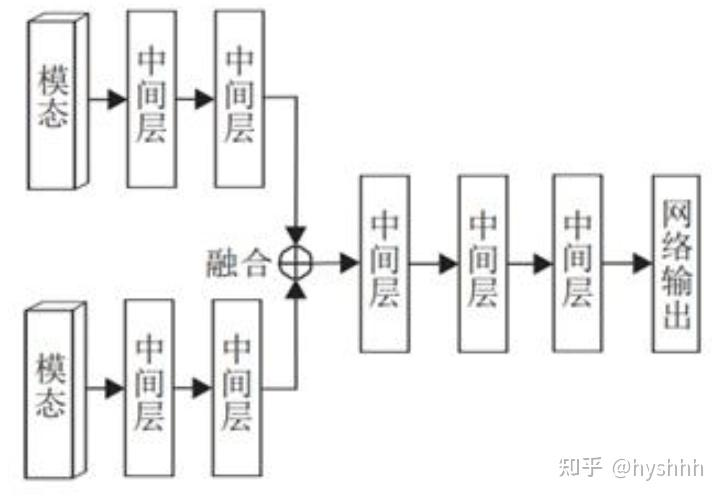
概念:在特征层面进行融合,即各传感器分别提取特征后,再在一定阶段进行融合(如网络的中间层)。
特点:
典型做法是使用深度神经网络分别处理图像和点云,然后在中间某一层进行特征对齐和融合。
例如,CLOCS(Camera-LiDAR Object Candidates Fusion)方法就是一种中期融合,它结合了来自 LiDAR 和摄像头的目标检测结果,通过学习特征关系来增强目标识别能力。
优点:
✔️ 兼顾了信息表达能力和计算效率。
✔️ 不需要完全同步原始数据,具有一定的灵活性。
✔️ 可适用于不同的神经网络架构,如 BEV、Transformer、融合网络等。
缺点:
❌ 融合方式的设计较复杂,可能需要额外的匹配算法(如 IoU 计算)。
决策级融合(晚期融合)
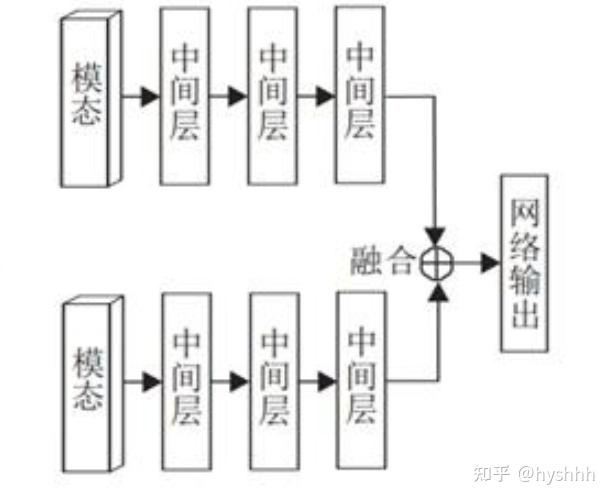
概念:在决策层进行融合,即各个传感器独立进行目标检测或识别,最终将检测结果进行加权融合或投票决定最终输出。
特点:
例如,摄像头检测到一个行人,而 LiDAR 也检测到了相应的物体,那么可以通过加权或 NMS(非极大值抑制)等策略进行最终融合。
计算量较小,适用于多种模型组合,如摄像头 + 雷达、LiDAR + V2X 车联网等。
优点:
✔️ 计算成本低,不需要对数据进行对齐或深度融合。
✔️ 可用于多种传感器组合,易扩展。
缺点:
❌ 由于各传感器单独处理数据,信息损失较大,融合效果可能不如早期或中期融合。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号