
IO模型
1 IO模型简介
"""
我们这里研究的IO模型都是针对网络IO的
Stevens在文章中一共比较了五种IO Model:
* blocking IO 阻塞IO
* nonblocking IO 非阻塞IO
* IO multiplexing IO多路复用
* signal driven IO 信号驱动IO
* asynchronous IO 异步IO
由于signal driven IO(信号驱动IO)在实际中并不常用,所以主要介绍其余四种IO Model。
"""
# IO操作的流程
#1)等待数据准备 (Waiting for the data to be ready)
#2)将数据从内核拷贝到进程中(Copying the data from the kernel to the process)
同步异步
阻塞非阻塞
常见的网络阻塞状态:
accept
recv
recvfrom
send虽然它也有io行为 但是不在我们的考虑范围
2 阻塞IO模型
遇到read操作时程序就会一直等待数据,也就是在等待数据准备阶段一直阻塞
直到接收到需要的数据才会拷贝数据到进程中,这个拷贝过程也是阻塞态,
然后才解除阻塞态,继续执行后面代码
`
该模型的特点是wait data阶段和copy阶段都阻塞
导致程序的运行效率低
"""
我们之前写的都是阻塞IO模型 协程除外
"""
import socket
server = socket.socket()
server.bind(('127.0.0.1',8080))
server.listen(5)
while True:
conn, addr = server.accept()
while True:
try:
data = conn.recv(1024)
if len(data) == 0:break
print(data)
conn.send(data.upper())
except ConnectionResetError as e:
break
conn.close()
# 在服务端开设多进程或者多线程 进程池线程池 其实还是没有解决IO问题
该等的地方还是得等 没有规避
只不过多个人等待的彼此互不干扰

3 非阻塞IO模型
3.1 非阻塞IO模型简介
遇到read操作时可以立即得到一个结果,可能为未收到数据或收到数据,
未收到数据得到的结果就是error,报错,但是需要再次发起read操作,
询问是否有数据,直到收到数据才停止
但是在两次read操作的间隔时间内,该程序可以执行一些别的操作,不用保持等待(阻塞)状态
`
3.2 非阻塞IO模型优缺点
该模型可以将数据准备阶段变为非阻塞状态,但是在这个阶段需要不断询问内核数据是否准备就绪
优点: 在数据准备阶段可以执行一些其他操作
缺点: 1.不断询问内核会大幅提高CPU的占用率,但是询问操作占用的CPU资源并未执行有效操作
2.询问存在间隔会导致IO操作响应慢,不间隔询问会导致占用CPU过高,可能导致死机
"""
要自己实现一个非阻塞IO模型
"""
import socket
import time
server = socket.socket()
server.bind(('127.0.0.1', 8081))
server.listen(5)
server.setblocking(False)
# 将所有的网络阻塞变为非阻塞
r_list = []
del_list = []
while True:
try:
conn, addr = server.accept()
r_list.append(conn)
except BlockingIOError:
# time.sleep(0.1)
# print('列表的长度:',len(r_list))
# print('做其他事')
for conn in r_list:
try:
data = conn.recv(1024) # 没有消息 报错
if len(data) == 0: # 客户端断开链接
conn.close() # 关闭conn
# 将无用的conn从r_list删除
del_list.append(conn)
continue
conn.send(data.upper())
except BlockingIOError:
continue
except ConnectionResetError:
conn.close()
del_list.append(conn)
# 挥手无用的链接
for conn in del_list:
r_list.remove(conn)
del_list.clear()
# 客户端
import socket
client = socket.socket()
client.connect(('127.0.0.1',8081))
while True:
client.send(b'hello world')
data = client.recv(1024)
print(data)
3.3 非阻塞IO模型总结
"""
虽然非阻塞IO给你的感觉非常的牛逼
但是该模型会 长时间占用着CPU并且不干活 让CPU不停的空转
我们实际应用中也不会考虑使用非阻塞IO模型
任何的技术点都有它存在的意义
实际应用或者是思想借鉴
"""

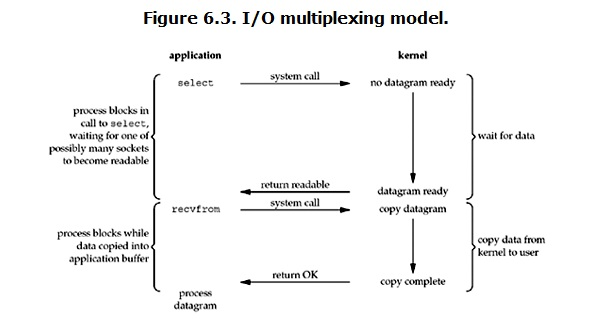
4 IO多路复用模型
4.1 IO多路复用模型简介
IO多路复用模型会通过操作系统的监管机制:如select对所有read操作的数据准备进行监管,
当得到数据后通知进程进行拷贝
操作系统的监管机制会将所有监管对象放在一起,轮流询问数据是否准备完毕
4.2 IO多路复用模型优缺点
优点: 单个进程能同时处理多个网络连接中的read操作
缺点: 1.进程在数据准备阶段以及拷贝阶段依旧是阻塞的,只不过是改为了select阻塞,而不是IO阻塞
2.该模型在网络连接数量小时效率都不如IO阻塞模型
3.该模型需要轮询所有对象,而在网络连接数量大时会导致响应慢
4.不同的操作系统提供的更高性能的监管机制不同,跨平台性不好
"""
当监管的对象只有一个的时候 其实IO多路复用连阻塞IO都比比不上!!!
但是IO多路复用可以一次性监管很多个对象
server = socket.socket()
conn,addr = server.accept()
监管机制是操作系统本身就有的 如果你想要用该监管机制(select)
需要你导入对应的select模块
"""
import socket
import select
server = socket.socket()
server.bind(('127.0.0.1',8080))
server.listen(5)
server.setblocking(False)
read_list = [server]
while True:
r_list, w_list, x_list = select.select(read_list, [], [])
"""
帮你监管
一旦有人来了 立刻给你返回对应的监管对象
"""
# print(res) # ([<socket.socket fd=3, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('127.0.0.1', 8080)>], [], [])
# print(server)
# print(r_list)
for i in r_list: #
"""针对不同的对象做不同的处理"""
if i is server:
conn, addr = i.accept()
# 也应该添加到监管的队列中
read_list.append(conn)
else:
res = i.recv(1024)
if len(res) == 0:
i.close()
# 将无效的监管对象 移除
read_list.remove(i)
continue
print(res)
i.send(b'heiheiheiheihei')
# 客户端
import socket
client = socket.socket()
client.connect(('127.0.0.1',8080))
while True:
client.send(b'hello world')
data = client.recv(1024)
print(data)
4.3 IO多路复用模型总结
"""
监管机制其实有很多
select机制 windows linux都有
poll机制 只在linux有 poll和select都可以监管多个对象 但是poll监管的数量更多
上述select和poll机制其实都不是很完美 当监管的对象特别多的时候
可能会出现 极其大的延时响应
epoll机制 只在linux有
它给每一个监管对象都绑定一个回调机制
一旦有响应 回调机制立刻发起提醒
针对不同的操作系统还需要考虑不同检测机制 书写代码太多繁琐
有一个人能够根据你跑的平台的不同自动帮你选择对应的监管机制
selectors模块
"""
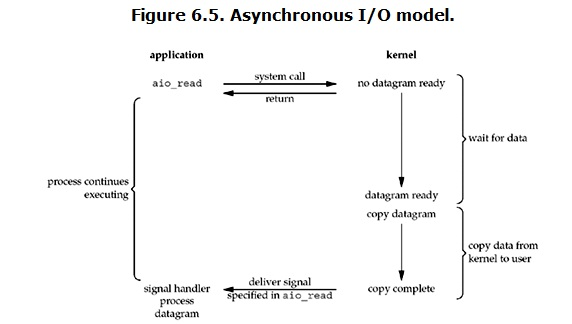
5 异步IO模型
5.1 异步IO模型简介
异步IO模型中内核会在收到应用的read操作后立刻返回,解除阻塞,
然后由内核进行数据准备阶段和拷贝阶段,当这两个阶段完成后通知应用中的进程read已完成
"""
异步IO模型是所有模型中效率最高的 也是使用最广泛的
相关的模块和框架
模块:asyncio模块
异步框架:sanic tronado twisted
速度快!!!
"""
import threading
import asyncio
@asyncio.coroutine
def hello():
print('hello world %s'%threading.current_thread())
yield from asyncio.sleep(1) # 换成真正的IO操作
print('hello world %s' % threading.current_thread())
loop = asyncio.get_event_loop()
tasks = [hello(),hello()]
loop.run_until_complete(asyncio.wait(tasks))
loop.close()
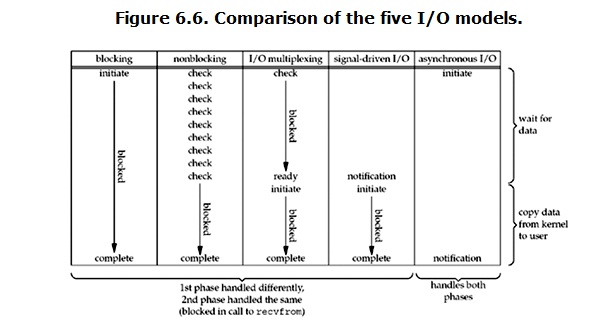
6 四个IO模型对比
到目前为止,已经将四个IO Model都介绍完了。现在回过头来回答最初的那几个问题:blocking和non-blocking的区别在哪,synchronous IO和asynchronous IO的区别在哪。
先回答最简单的这个:blocking vs non-blocking。前面的介绍中其实已经很明确的说明了这两者的区别。调用blocking IO会一直block住对应的进程直到操作完成,而non-blocking IO在kernel还准备数据的情况下会立刻返回。
再说明synchronous IO和asynchronous IO的区别之前,需要先给出两者的定义。Stevens给出的定义(其实是POSIX的定义)是这样子的:
A synchronous I/O operation causes the requesting process to be blocked until that I/O operationcompletes;
An asynchronous I/O operation does not cause the requesting process to be blocked;
两者的区别就在于synchronous IO做”IO operation”的时候会将process阻塞。按照这个定义,四个IO模型可以分为两大类,之前所述的blocking IO,non-blocking IO,IO multiplexing都属于synchronous IO这一类,而 asynchronous I/O后一类 。
有人可能会说,non-blocking IO并没有被block啊。这里有个非常“狡猾”的地方,定义中所指的”IO operation”是指真实的IO操作,就是例子中的recvfrom这个system call。non-blocking IO在执行recvfrom这个system call的时候,如果kernel的数据没有准备好,这时候不会block进程。但是,当kernel中数据准备好的时候,recvfrom会将数据从kernel拷贝到用户内存中,这个时候进程是被block了,在这段时间内,进程是被block的。而asynchronous IO则不一样,当进程发起IO 操作之后,就直接返回再也不理睬了,直到kernel发送一个信号,告诉进程说IO完成。在这整个过程中,进程完全没有被block。
经过上面的介绍,会发现non-blocking IO和asynchronous IO的区别还是很明显的。在non-blocking IO中,虽然进程大部分时间都不会被block,但是它仍然要求进程去主动的check,并且当数据准备完成以后,也需要进程主动的再次调用recvfrom来将数据拷贝到用户内存。而asynchronous IO则完全不同。它就像是用户进程将整个IO操作交给了他人(kernel)完成,然后他人做完后发信号通知。在此期间,用户进程不需要去检查IO操作的状态,也不需要主动的去拷贝数据。
 posted on
posted on

 浙公网安备 33010602011771号
浙公网安备 33010602011771号