201.一种六磁子交通系统
发明名称--一种六磁子交通系统
| 申请号 | CN201810852572 | 申请日 | 2018.07.30 | ||
| 公开(公告)号 | CN108891425A | 公开(公告)日 | 2018.11.27 | ||
| IPC分类号 | B61B13/08; B60L13/04 | 申请(专利权)人 | 南京信息工程大学; | ||
| 发明人 | 赵忠瑞; | 优先权号 |
摘要:
| 本发明公开了一种六磁子交通系统,其特征在于,包括总控制系统、太阳能集能装置、储能装置、磁基、悬浮板和停靠坞;所述太阳能集能装置包括立在地面上方的太阳能电池板;所述储能装置包括储能装置壳体和安装在储能装置壳体内的蓄电电池组,所述蓄电电池组的电能输入端与所述太阳能电池板的电能输出端连接;所述磁基设置在地面以下,由按照规划行驶路线铺排的多个磁基单元组成,其中包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置第一磁基单元的一侧,位于所述停靠坞的下方。本发明六磁子交通系统基于磁悬浮技术实现,结构规划合理,操作方便,易于实现,且占地面积小,不易产生拥堵等问题,能够有效的提高交通运输的效率。 |
摘要附图:
| 权利要求书 |
| 1.一种六磁子交通系统,其特征在于,包括总控制系统、太阳能集能装置(1)、储能装置(2)、磁基(3)、悬浮板(4)和停靠坞(5); |
| 所述太阳能集能装置(1)包括立在地面上方的太阳能电池板(11); |
| 所述储能装置(2)包括储能装置壳体(21)和安装在储能装置壳体(21)内的蓄电电池组(22),所述蓄电电池组(22)的电能输入端与所述太阳能电池板(11)的电能输出端连接; |
| 所述磁基(3)设置在地面以下,由按照规划行驶路线铺排的多个磁基单元组成,其中包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置第一磁基单元的一侧,位于所述停靠坞(5)的下方; |
| 所述第一磁基单元包括磁基壳体(31),磁基壳体(31)的内腔构成了磁基仓(32),所述磁基仓(32)内安装有高频电流发生器、多个铁芯线圈、第一通信模块和A单片机(37);所述的多个铁芯线圈包括位于磁基仓(32)左侧的前后两个小铁芯线圈,位于磁基仓(32)右侧的前后两个小铁芯线圈,以及位于四个小铁芯线圈中部的前后两个大铁芯线圈;所述高频电流发生器的输入端与储能装置(2)连接,其输出端输出方波高频电流,两个大铁芯线圈、四个小铁芯线圈分别与所述高频电流发生器连接,使所述大、小铁芯线圈在通电时产生高频磁通,形成高频磁场;各大、小铁芯线圈与高频电流发生器的连接电路上分别设置有电流调节器,所述电流调节器与所述A单片机(37)连接,根据A单片机(37)发送的控制信号,调节对应的铁芯线圈上的电流,达到调节磁场的目的,所述A单片机(37)通过第一通信模块与所述总控制系统连接; |
| 所述第二磁基单元包括磁基壳体内腔构成的磁基仓,其磁基仓内安装有高频电流发生器、铁芯线圈、第一通信模块和A单片机,第二磁基单元的高频电流发生器的输入端与储能装置(2)连接,其输出端与第二磁基单元的铁芯线圈连接,使其在通电时产生高频磁通,形成高频磁场,第二磁基单元的A单片机通过第一通信模块与所述总控制系统连接; |
| 所述悬浮板(4)包括踩踏板(43)、操作面板(41)、悬浮板控制器(42)、喷气系统(48)、电池组(47)、悬浮金属板(44)和母充电口(45),悬浮金属板(44)设在悬浮板的底面,所述踩踏板(43)设在悬浮板的顶面; |
| 悬浮板电池组(47)为可充电电池组,通过母充电口(42)与停靠坞(5)实现充电连接,为悬浮板(4)的各个耗电元器件供电; |
| 所述操作面板(41)通过与悬浮板控制器(42)连接,用于信息的输入与显示; |
| 所述悬浮板控制器(42)设有陀螺仪、重力感应模块、B单片机、定位模块和第二通信模块,所述B单片机通过第二通信模块与总控制系统通信连接;所述重力感应模块、陀螺仪的信号输出端与B单片机连接,所述重力感应模块用于采集悬浮板(4)承载的重力信息,所述陀螺仪用于采集悬浮板(4)的姿态信息,第一磁基单元根据上述信息调节磁场;所述定位模块与B单片机连接,用于采集悬浮板4在行驶路线上的位置信息; |
| 所述喷气系统(48)包括左右两个喷气单元,两喷气单元内的发动机分别与所述B单片机连接,由B单片机控制其各自的输出功率; |
| 所述停靠坞(5)顺着磁基(2)的延伸方向,沿途设置多个,位于第一磁基单元的一侧,所述停靠坞(5)包括壳体、控制器、操作面(51)板、悬浮板限位机构和公供电口(54),所述控制器包括C单片机(52)和第三通信模块,停靠坞的操作面板(51)与所述C单片机(52)连接,所述C单片机(52)通过所述第三通信模块与总控制系统连接,所述公供电口(54)与悬浮板的母充电口(45)相匹配,并与储能装置(2)连接。 |
| 2.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 所述喷气单元内设有加热装置(485),所述加热装置(485)设置在喷气单元发动机的进气端的前侧。 |
| 3.根据权利要求1或2所述的一种六磁子交通系统,其特征在于: |
| 所述喷气单元内设有反推机构(488),所述悬浮板(4)的壳体内设有左右两个前后贯通的导气通道(487),两喷气单元分别设置在相应的导气通道内,在所述导气通道内,所述反推机构(488)设置在喷气单元发动机出气端的后侧,导气通道出气口之前; |
| 所述反推机构(488)在导气通道(487)上、下两侧分别设有一反推器导气槽,并设有分别控制反推器导气槽以及导气通道(487)出气口打开或关闭的阀结构,所述反推器导气槽的外端口可与外部大气连通,内端口与所述导气通道(487)连通,整体向悬浮板前进方向倾斜,用于产生反向推力,实现悬浮板的减速和停止。 |
| 4.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 所述磁基(3)、悬浮板(4)、停靠坞(5)的通信模块包括GPRS网络通信单元和蓝牙通信单元,磁基(3)、悬浮板(4)、停靠坞(5)通过GPRS网络通信单元与总控制系统通信连接;磁基单元(3)通过蓝牙通信单元与悬浮板(4)、停靠坞(5)通信连接。 |
| 5.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 在磁基(3)的上方设置凹槽式的导轨,悬浮板(4)被放置在所述导轨的凹槽内,使悬浮板运行时,无法从磁基(3)产生的磁场中脱离,所述导轨在对应停靠坞(5)的位置设有开口,使悬浮板(4)可以平移到停靠坞(5)中。 |
| 6.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 所述悬浮板控制器(42)设有速度传感器,所述速度传感器用于采集悬浮板的行驶速度信息,与B单片机连接。 |
| 说明书 |
| 一种六磁子交通系统 |
| 技术领域 |
| 本发明属于轨道交通技术领域,具体涉及一种新型的交通系统。 |
| 背景技术 |
| 在互联网信息时代的大背景下,新型交通系统将是未来的发展趋势,新型交通系统是指通过对现代信息、通信、控制等技术的集成应用,构建安全、便捷、高效、绿色的交通运输体系。目前的交通系统私有化严重,而智能交通仍然局限于单个车辆的自动驾驶,不仅会形成资源的浪费,而且有极大的安全隐患。同时,随着全球城市的高速发展,尤其是化石能源消耗量加大,对环境造成了极大的损害,未来绿色能源将是发展方向,而现在的绿色交通方向还仅局限于电动汽车,而大量的私有汽车必然会引起拥挤。 |
| 发明内容: |
| 本发明的技术目的是提供一种基于磁悬浮技术的六磁子交通系统,其技术方案为: |
| 一种六磁子交通系统,其特征在于,包括总控制系统、太阳能集能装置、储能装置、磁基、悬浮板和停靠坞; |
| 所述太阳能集能装置包括立在地面上方的太阳能电池板; |
| 所述储能装置包括储能装置壳体和安装在储能装置壳体内的蓄电电池组,所述蓄电电池组的电能输入端与所述太阳能电池板的电能输出端连接; |
| 所述磁基设置在地面以下,由按照规划行驶路线铺排的多个磁基单元组成,其中包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置第一磁基单元的一侧,位于所述停靠坞的下方; |
| 所述第一磁基单元包括磁基壳体,磁基壳体的内腔构成了磁基仓,所述磁基仓内安装有高频电流发生器、多个铁芯线圈、第一通信模块和A单片机;所述的多个铁芯线圈包括位于磁基仓左侧的前后两个小铁芯线圈,位于磁基仓右侧的前后两个小铁芯线圈,以及位于四个小铁芯线圈中部的前后两个大铁芯线圈;所述高频电流发生器的输入端与储能装置连接,其输出端输出方波高频电流,两个大铁芯线圈、四个小铁芯线圈分别与所述高频电流发生器连接,使所述大、小铁芯线圈在通电时产生高频磁通,形成高频磁场;各大、小铁芯线圈与高频电流发生器的连接电路上分别设置有电流调节器,所述电流调节器与所述A单片机连接,根据A单片机发送的控制信号,调节对应的铁芯线圈上的电流,达到调节磁场的目的,所述A单片机通过第一通信模块与所述总控制系统连接; |
| 所述第二磁基单元包括磁基壳体内腔构成的磁基仓,其磁基仓内安装有高频电流发生器、铁芯线圈、第一通信模块和A单片机,第二磁基单元的高频电流发生器的输入端与储能装置连接,其输出端与第二磁基单元的铁芯线圈连接,使其在通电时产生高频磁通,形成高频磁场,第二磁基单元的A单片机通过第一通信模块与所述总控制系统连接; |
| 所述悬浮板包括踩踏板、操作面板、悬浮板控制器、喷气系统、电池组悬浮金属板和母充电口,悬浮金属板设在悬浮板的底面,所述踩踏板设在悬浮板的顶面; |
| 悬浮板电池组为可充电电池组,通过母充电口与停靠坞实现充电连接,为悬浮板的各个耗电元器件供电; |
| 所述操作面板通过与悬浮板控制器连接,用于信息的输入与显示; |
| 所述悬浮板控制器设有陀螺仪、重力感应模块、B单片机、定位模块和第二通信模块,所述B单片机通过第二通信模块与总控制系统通信连接;所述重力感应模块、陀螺仪的信号输出端与B单片机连接,所述重力感应模块用于采集悬浮板承载的重力信息以,所述陀螺仪用于采集悬浮板的姿态信息,第一磁基单元根据上述信息调节磁场;所述定位模块与B单片机连接,用于采集悬浮板在行驶路线上的位置信息; |
| 所述喷气系统包括左右两个喷气单元,两喷气单元内的发动机分别与所述B单片机连接,由B单片机控制其各自的输出功率; |
| 所述停靠坞顺着磁基的延伸方向,沿途设置多个,位于第一磁基单元的一侧,所述停靠坞包括壳体、控制器、操作面板、悬浮板限位机构和公供电口,所述控制器包括C单片机和第三通信模块,停靠坞的操作面板与所述C单片机连接,所述C单片机通过所述第三通信模块与总控制系统连接,所述公供电口与悬浮板的母充电口相匹配。 |
| 在上述方案的基础上,进一步改进或优选的方案还包括: |
| 所述喷气单元内设有加热装置,所述加热装置设置在喷气单元发动机的进气端的前侧。 |
| 所述喷气单元内设有反推机构,所述悬浮板的壳体内设有左右两个前后贯通的导气通道,两喷气单元分别设置在相应的导气通道内,在所述导气通道内,所述反推机构设置在喷气单元发动机出气端的后侧,导气通道出气口之前; |
| 所述反推机构在导气通道上、下两侧分别设有一反推器导气槽,并设有分别控制反推器导气槽以及导气通道出气口打开或关闭的阀结构,所述反推器导气槽的外端口可与外部大气连通,内端口与所述导气通道连通,整体向悬浮板前进方向倾斜,用于产生反向推力,实现悬浮板的减速和停止。 |
| 所述磁基、悬浮板、停靠坞的通信模块包括GPRS网络通信单元和蓝牙通信单元,磁基、悬浮板、停靠坞通过GPRS网络通信单元与总控制系统通信连接;磁基单元通过蓝牙通信单元与悬浮板、停靠坞建立通信连接。 |
| 在磁基的上方设置凹槽式的导轨,悬浮板被放置在所述导轨的凹槽内,使悬浮板运行时,无法从磁基产生的磁场中脱离,所述导轨在对应停靠坞的位置设有开口,使悬浮板可以平移到停靠坞中。 |
| 所述悬浮板控制器设有速度传感器,所述速度传感器用于采集悬浮板的行驶速度信息,与B单片机连接。 |
| 有益效果: |
| 本发明六磁子交通系统基于磁悬浮技术实现,结构规划合理,操作方便,易于实现,且占地面积小,每条磁基上为单向行驶,不易产生拥堵等问题,能够有效的提高交通运输的效率。 |
| 附图说明 |
| 图1为实施例交通系统的整体结构示意图。 |
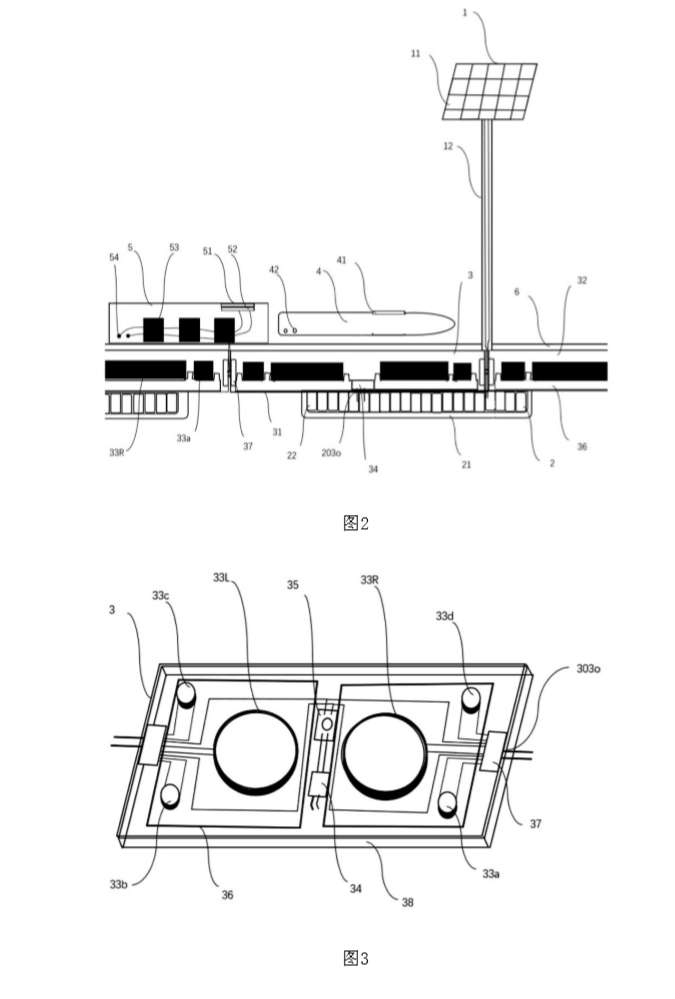
| 图2为实施例交通系统整体剖面结构示意图。 |
| 图3为磁基结构的示意图。 |
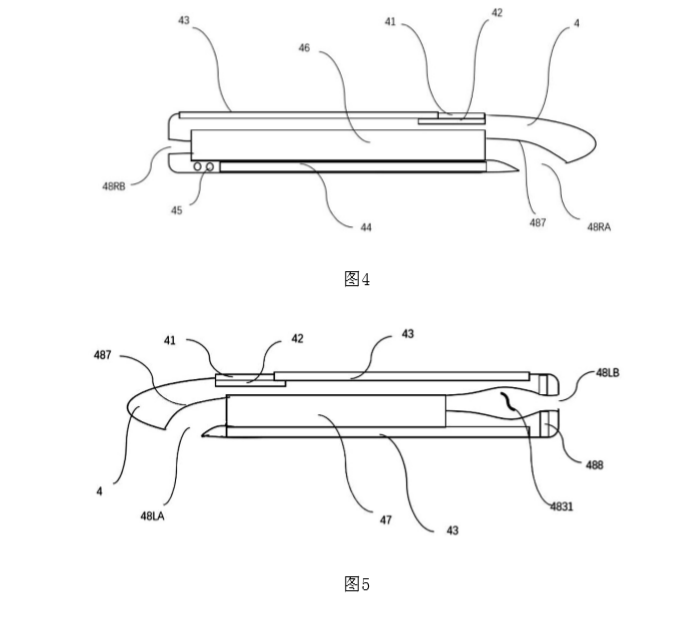
| 图4为悬浮板的右视结构示意图。 |
| 图5为悬浮板的左视结构示意图。 |
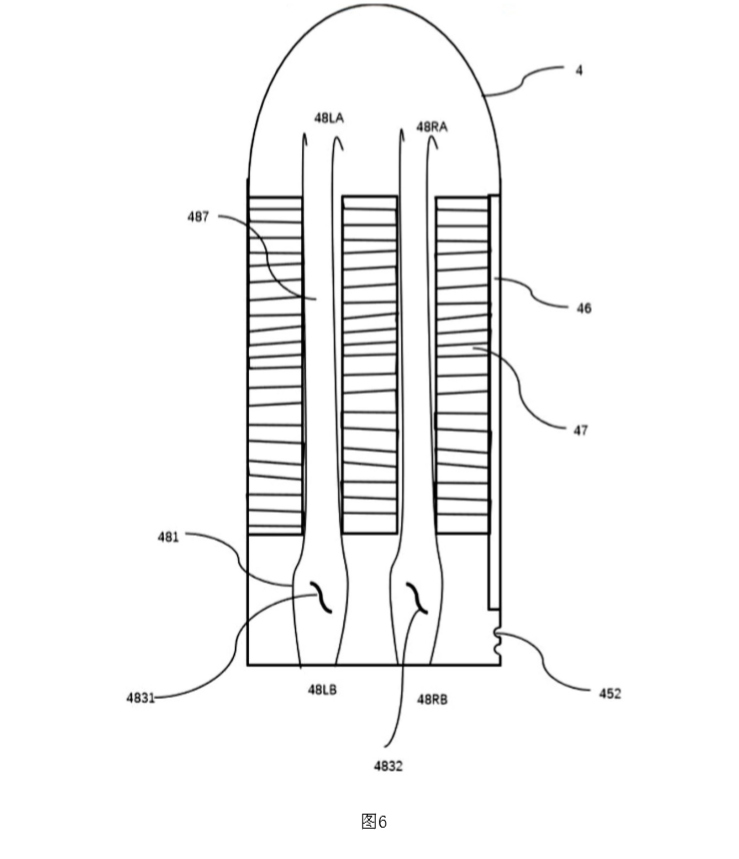
| 图6为悬浮板的俯视结构示意图。 |
| 图7为喷气系统的发动机结构示意图。 |
| 图8为悬浮板处于停靠状态时与停靠坞的结构示意图。 |
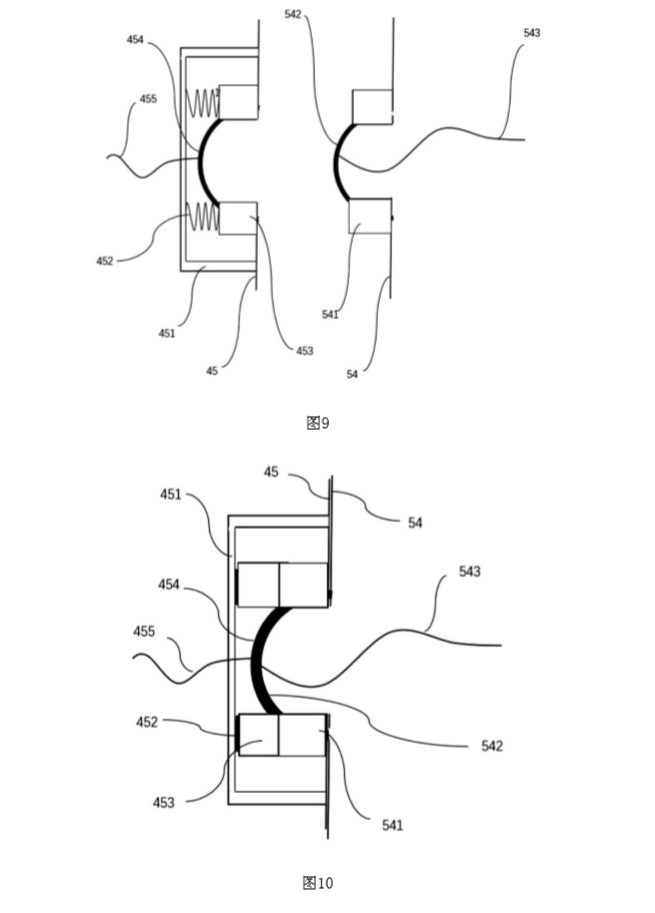
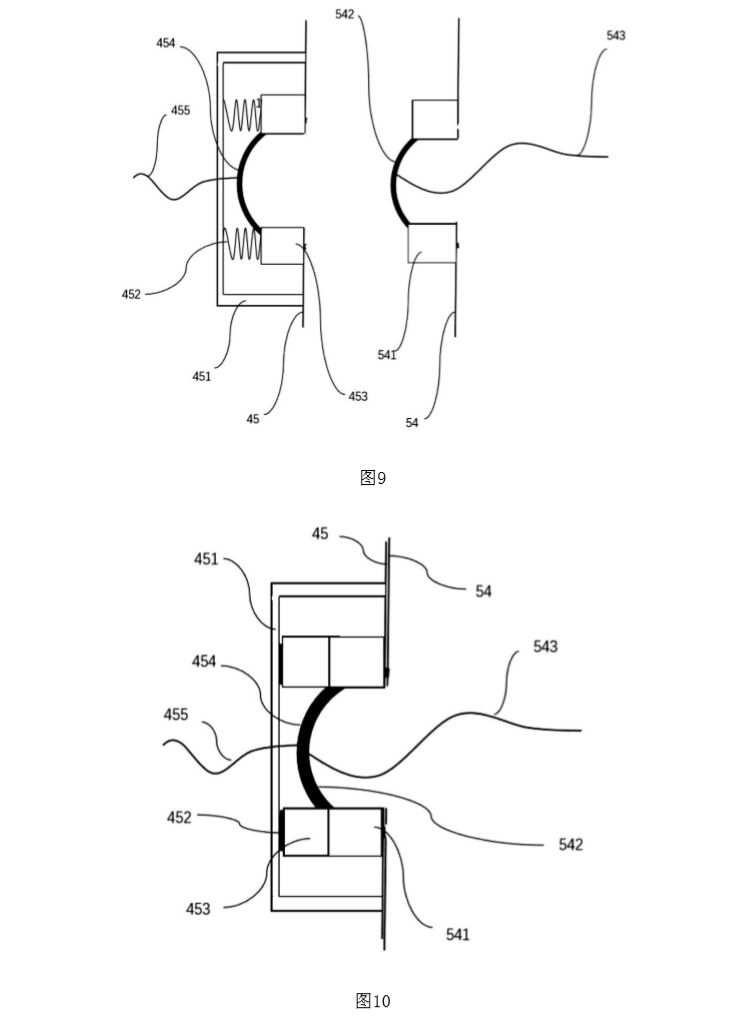
| 图9为公供电口与母充电口分离时的结构示意图。 |
| 图10为公供电口与母充电口充电时的结构示意图。 |
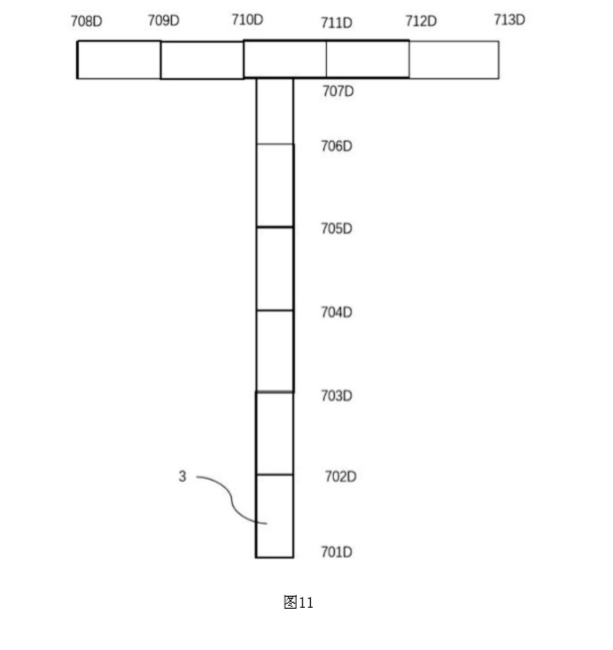
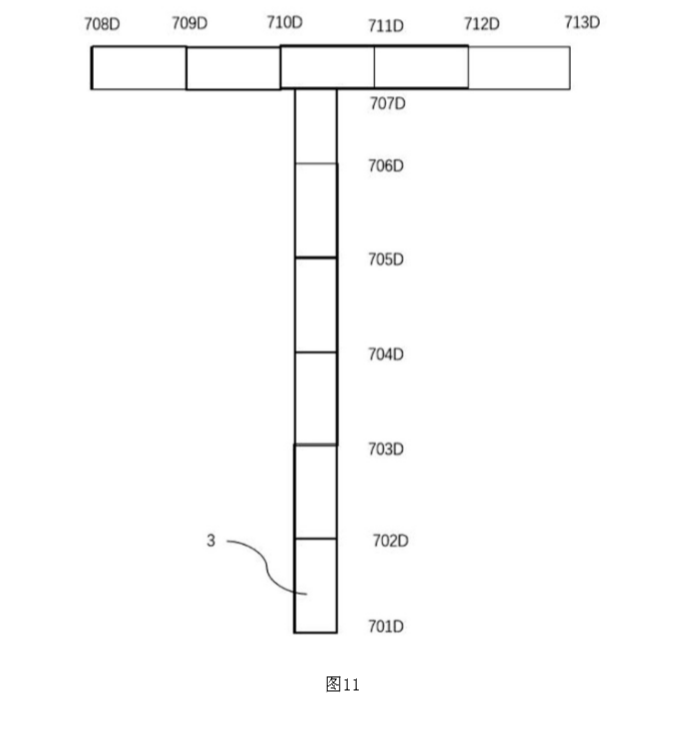
| 图11为交通系统的说明路径方向示意图 |
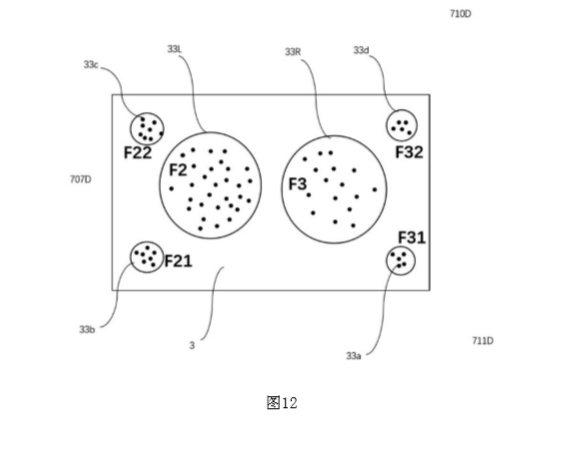
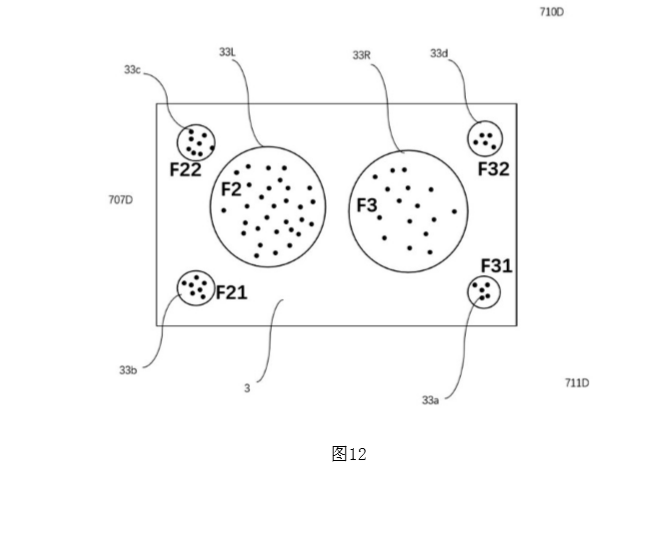
| 图12为悬浮板的受力分析示意图。 |
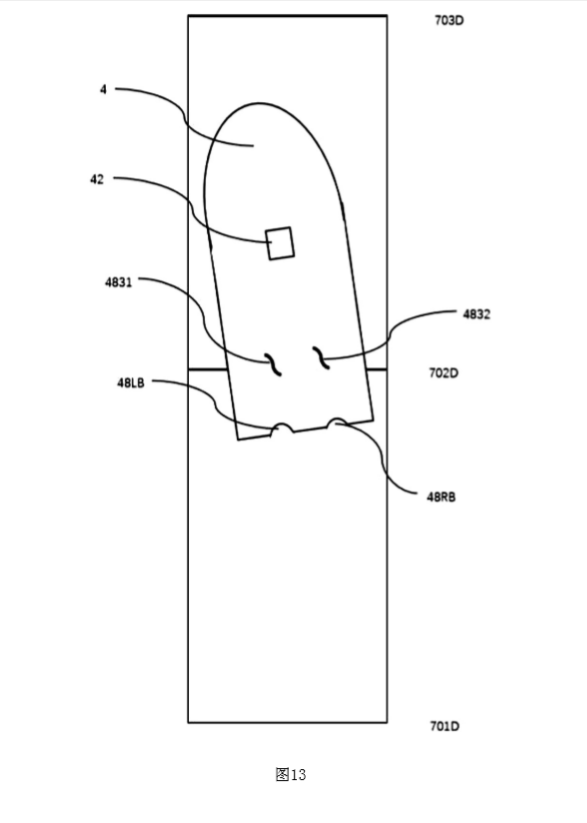
| 图13为偏移悬浮板的俯视示意图。 |
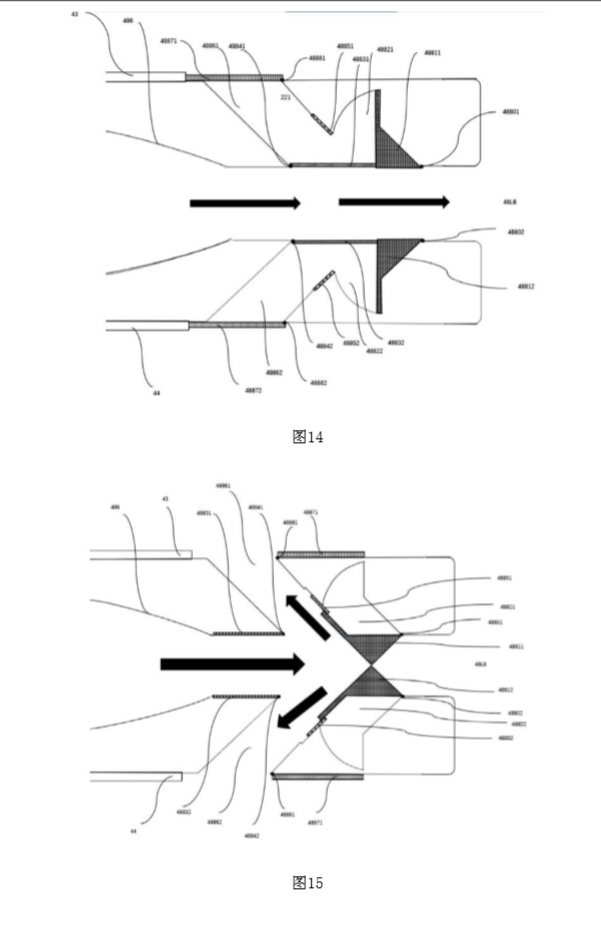
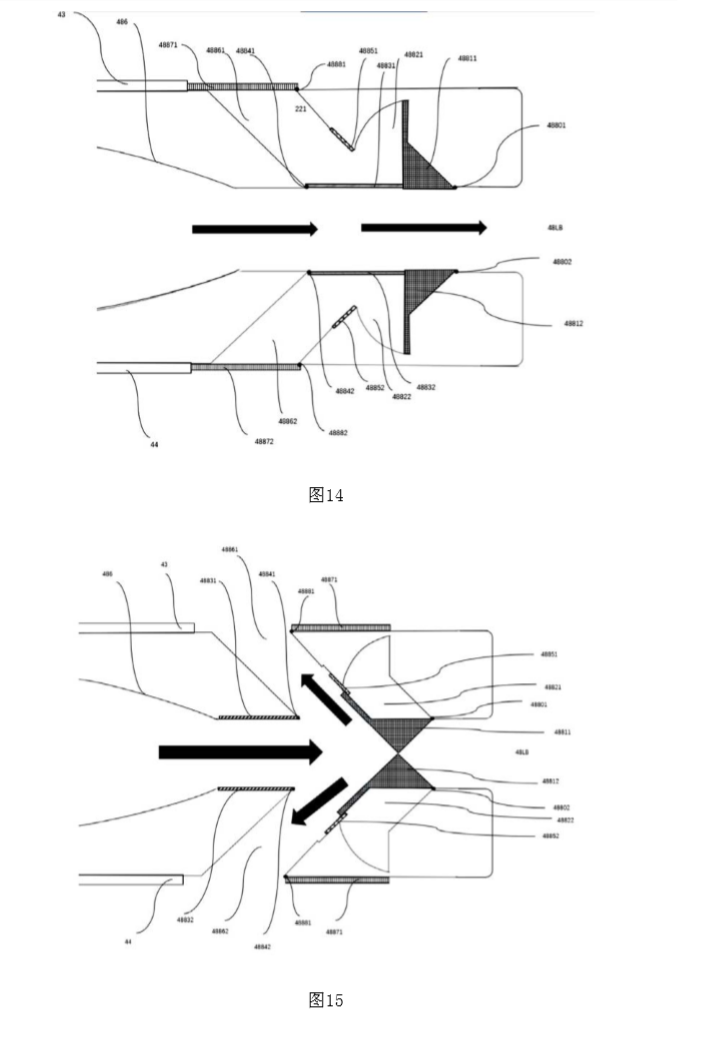
| 图14为反推装置关闭状态的示意图。 |
| 图15为反推装置关闭启动的示意图。 |
| 图中: |
| 1-太阳能集能装置;11-太阳能电池板,12-太阳能电池板柱;2-储能装置;21-储能装置壳体;22-高能蓄电电池组;3-磁基;31-磁基壳体;32-磁基仓;33R-大铁芯线圈;33L-大铁芯线圈;33a-小铁芯线圈;33b-小铁芯线圈;33c-小铁芯线圈;33d-小铁芯线圈;34-高频变压器;35-高压整流蓄能模块;36-线圈卡槽;37-A单片机;4-悬浮板;41-操作面板;42-B单片机;43-踩踏板;44-悬浮金属板;45-母充电口;451-母充电口壳体;452-母充电口弹簧;453-母充电口永磁体;454-母充电口导电片;46-永磁体;47-小型高能电池组;48-喷气系统;481-外壳;482-发电机固定装置;483-发动机;4831-左发动机;4832-右发动机;484-扇叶;485-加热装置;487-导气通道;48LA-左进气口;48RA-右进气口;48LB-左出气口;48RA-右出气口;5-停靠坞;51-操作面板;52-C单片机;53-电磁铁;54-公供电口;541-公供电口永磁体;542-公供电口导电片;6-地面;203o-导线口; |
| 701D,702D,703D,704D,705D,706D,707D,708D,709D,710D,711D,712D,713D均为该点所示意的位置;F2-大铁芯线圈33L产生的斥力;F3-大铁芯线圈33R产生的斥力;F21-小铁芯线圈33b产生的斥力;F22-小铁芯线圈33c产生的斥力;F31-小铁芯线圈33a产生的斥力;F32-小铁芯线圈33d产生的斥力。 |
| 具体实施方式 |
| 为使本发明的技术方案和工作原理更加清楚明白,下面结合以实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。 |
| 实施例一: |
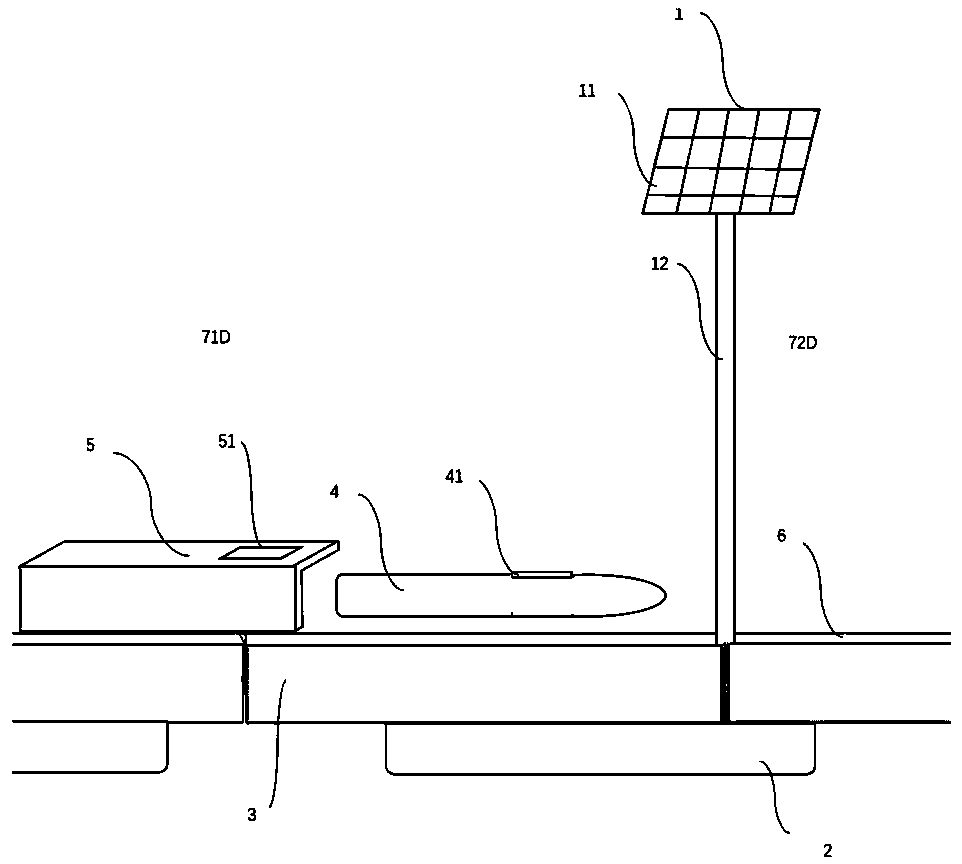
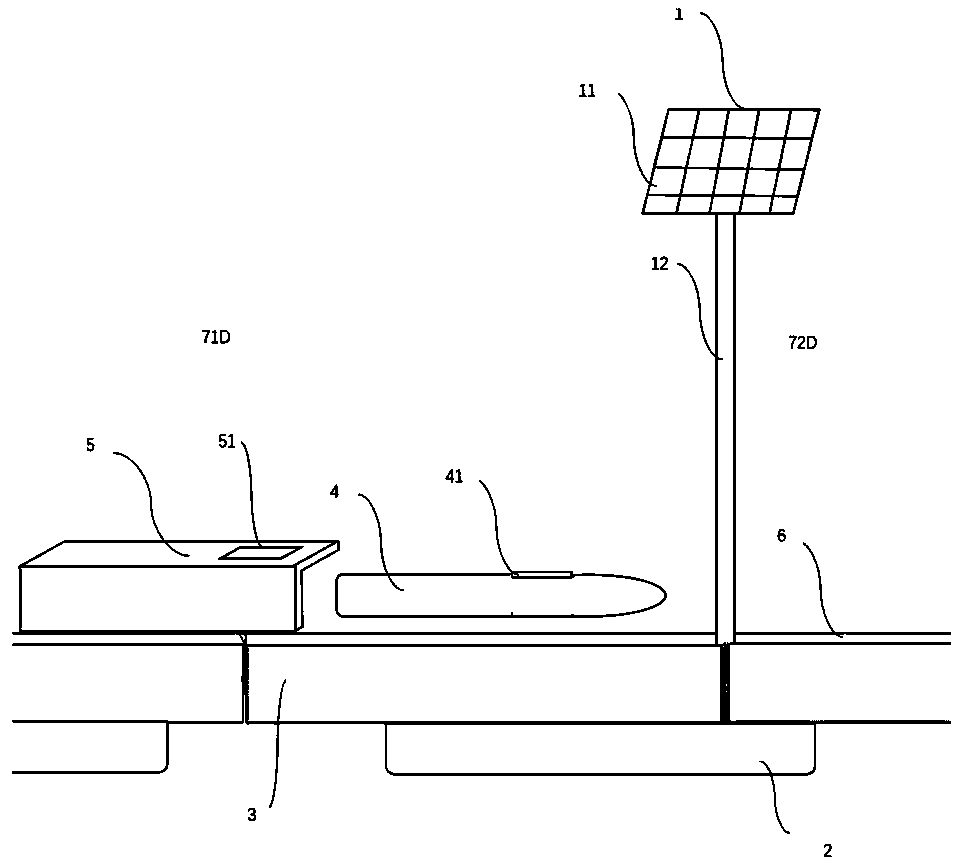
| 如图1、图2所示的一种六磁子交通系统,包括总控制系统、太阳能集能装置1、储能装置2、磁基3、悬浮板4和停靠坞5等组成部分。 |
| 所述太阳能集能装置1包括太阳能电池板11和太阳能电池板柱12,所述太阳能电池板11通过太阳能电池板柱12立在底面上方,根据预先规划的行驶路线,每隔每隔一定距离设定一个太阳能集能装置1,从而实现充分利用清洁能源太阳能。 |
| 所述储能装置2包括储能装置壳体21和设置在储能装置壳体21内的高能蓄电电池组22,所述高能蓄电电池组22的电能输入端与太阳能电池板11的电能输出端连接。所述储能装置2设置在地面以下,每个太阳能集能装置1对应至少一个储能装置2,储能装置壳体21上面设置有导线口203o,储能装置2为磁基3和停靠坞5供电。 |
| 所述磁基3设置在地面6以下,位于所述储能装置2的上方,由按照规划行驶路线铺排的多个磁基单元组成,所述磁基单元包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置在停靠坞5的下方。 |
| 如图3所示,所述第一磁基单元设有磁基壳体31,磁基壳体31的内腔构成了磁基仓32,所述磁基仓32内安装有高频电流发生器、大铁芯线圈33R、大铁芯线圈33L、小铁芯线圈33a、小铁芯线圈33b、小铁芯线圈33c、小铁芯线圈33d、A单片机37和第一通信模块。 |
| 所述高频电流发生器的输入端与储能装置2连接,将高能蓄电电池组22输出的直流电,经过变频逆变后,输出方波高频电流,在上述大、小铁芯线圈中产生高频磁通,形成高频磁场。所述高频电流发生器内设有三极管和高频变压器34组成的振荡电路,以及高压整流蓄能模块35,高能蓄电电池组22的输出经过振荡电路变为高频高压交流电,再经过高压整流和电容蓄能,用电容的高压储存电荷对线圈放电,可产生很强的磁场。考虑到太阳能电池板产能不足或产生故障的情况,可将外部电网作为备用电源,即高能蓄电电池组22设有与外部电网连接的充电端口。 |
| 所述磁基仓32的底面设有前后两个相同的线圈卡槽36,每个线圈卡槽36内安装一个大铁芯线圈和两个小铁芯线圈,使四个小铁芯线圈位于磁基仓32的四角,两个大铁芯线圈位于四个小铁芯线圈的中间,六个铁芯线圈以线圈卡槽36的中线为对称中心线,结构对称。磁基仓32的前后两侧各设有一个A单片机37,每个A单元机37控制一个线圈卡槽36内安装的一组线圈(包括一个大铁芯线圈和两个小铁芯线圈)。两个大铁芯线圈、四个小铁芯线圈分别与所述高频电流发生器连接,且上述铁芯线圈与高频电流发生器的连接电路上设置有电流调节器和开关器件,所述电流调节器、开关器件分别与所述A单片机37连接,电流调节器根据A单片机37发送的控制信号,调节铁芯线圈上的电流,达到调节磁场的目的,电流调节器针对每个铁芯线圈单独配置,即电流调节器与大小铁芯线圈一一匹配,而所述开关器件,与同一个A单盘机37连接的小铁芯线圈可共用一个。所述A单片机37的工作电源由储能装置2或外部电网提供,A单片机37通过第一通信模块与所述总控制系统连接,根据总控制系统发送的信息控制各铁芯线圈电路的通断和对电流大小的调节。 |
| 所述磁基仓32的底面设有导线口203o,所述导线口203o用于高能蓄电电池组22与高频电流发生器的连接。 |
| 所述第一磁基单元中,大铁芯线圈用于产生托起悬浮板4的主要磁力,小铁芯线圈主要用于对悬浮板4左右平衡的调节,以完成转向和偏心调整等过程,所述第二磁基单元仅需要保持悬浮板4的悬浮状态即可,故可以省略电流调节器和小铁芯线圈。本实施例中,所述第二磁基单元与第一磁基单元结构采用相同的结构,在第一磁基单元的结构基础上,第二磁基单元顶面增设了用于高能蓄电电池组22与停靠坞5供电连接的导线口。 |
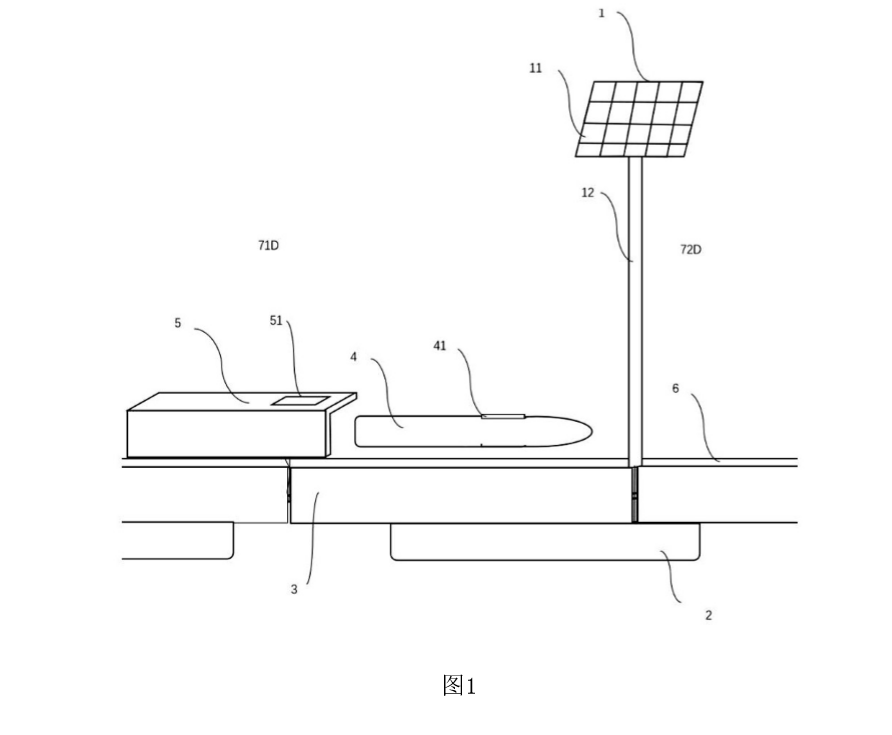
| 如图4、图5所示,所述悬浮板4包括踩踏板43、操作面板41、悬浮板控制器42、喷气系统48、小型高能电池组47、悬浮金属(如铜或铝)板44和母充电口45等组成部分。所述小型高能电池组47为可充电高能电池组,通过母充电口42与停靠坞5实现连接充电,为悬浮板4的各个耗电元器件供电。悬浮金属板44设在悬浮板4最下面,所述踩踏板43设在悬浮板4最上面。所述喷气系统48由发动机483、加热装置485、反推机构488等构成。 |
| 所述操作面板41通过导线与悬浮板控制器42连接,用于信息的输入与显示。所述小型高能电池组为操作面板41、悬浮板控制器42供能。所述悬浮板控制器42包括陀螺仪、重力感应模块、速度传感器、B单片机、定位模块和第二通信模块等组成部分,B单片机通过第二通信模块与总控制系统进行信息的传递,所述重力感应模块用于采集悬浮板承载的重力信息以及重力在悬浮板上的分布状况(例如重心是否平稳,重心产生了怎样的偏移等),所述陀螺仪用于采集悬浮板的姿态信息,所述速度传感器用于采集悬浮板的行驶速度信息,B单片机将上述信息发送给总控制系统,总控制系统再向对应的第一磁基单元内的A单片机37发出控制指令。A单片机通过电流调节器,根据悬浮板4承载的重力调节大铁芯线圈或所有铁芯线圈的电流,实现对整体磁场的调整;根据悬浮板4悬浮板的姿态和/或重心的偏移情况,调整小铁芯线圈电流,实现对局部磁场的调整,以达到对悬浮板4平稳控制的目的。所述定位模块与B单片机连接,用于采集悬浮板4在行驶路线上的位置信息,总控制系统根据所述定位模块反馈的信息,控制悬浮板4前方的第一磁基单元启动,而路过的第一磁基单元断电或处于待机(低能耗)的状态,以避免能源的浪费。所述定位模块可采用GPS定位技术、北斗定位或网络定位技术。 |
| 如图6所示,所述喷气系统48设有左右两个喷气单元,下面以右侧喷气单元为例进行结构的详细说明: |
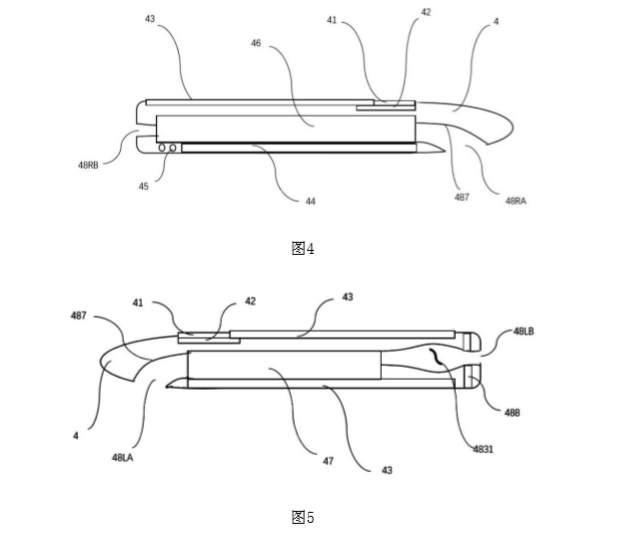
| 如图4所示,悬浮板4的前端下部设有右进气口48RA,悬浮板4后端设有右出气口48RB,所述右进气口48RA与右出气口48RB通过导气通道487连通,右侧喷气单元安装在所述导气通道487内。如图7所示,右侧喷气单元设有安装壳体481,所述安装壳体内安装有右喷气式发动机4832,所述加热装置485设置在发动机扇叶484的前端,固定在所述安装壳体481内。 |
| 左侧喷气单元与右侧喷气单元结构对称,发动机设置左右两个,即左喷气式发动机4831和右喷气式发动机4832,是为了实现更好地控制转向。经过左右两个导气通道487的连接,悬浮板从左进气口48LA和48RA进气,从48LB和48RB出气。所述悬浮板控制器42与左右两个喷气器发动机以及加热装置连接,控制发动机的输出功率和加热装置的启闭。 |
| 所述加热装置485,主体由电阻片构成,当悬浮板的速度需要再提高或需要更大动力时,可通过加热吸入的空气,使空气体积膨胀,被排出的气体体积变大,从而实现更大推力和更大速度。 |
| 所述反推机构由上折门反推器轴48801、下折门反推器轴48802、上折门反推器48811、下折门反推器48812、上反推器仓48821、下反推器仓48822、上反推器伸缩挡板48831、下反推器伸缩挡板48832、上伸缩挡板口48841、下伸缩挡板口48842、上锁板48851、下锁板48852、上反推器导气槽48861、下反推器导气槽48862、上安全锁板48871、下安全锁板48872、上安全锁板轴48881、下安全锁板轴48882等构成。 |
| 下面以右侧喷气单元的反推机构488为例进行进一步说明,反推机构488设置在右喷气式发动机4832后方的导气通道内。 |
| 如图14、15所示,导气通道487上方的悬浮板壳体内设有上反推器仓48821和与上反推器导气槽48861,导气通道487下方的悬浮板壳体内设有下反推器仓48822和下反推器导气槽48861。所述上、反推器导气槽朝着悬浮板4行进的方向倾斜,且内外贯通,其内端口与导气通道487连通,且内端口的一侧设有上伸缩挡板口48841、下伸缩挡板口48842。所述的上、下反推器仓内分别用于收纳上折门反推器48811和下折门反推器48812,上反推器仓48821的底部与上反推器导气槽48861的底部连通相接,下反推器仓48822的上部与下反推器导气槽48861的上部连通相接,所述上折门反推器48811通过上折门反推器轴48801安装在上反推器仓48821的内(下)端口的后侧,下折门反推器48812通过下折门反推器轴48802安装在下反推器仓48822的内(上)端口的后侧,上折门反推器48811和下折门反推器48812向导气通道487内侧翻转到极限位置时可将导气通道487封闭,向上翻转,则导气通道487打开,其往复的翻转动作可通过摆动气缸(未图示)等旋转驱动机构实现;所述上锁板48851、下锁板48852安装在对应的反推器导气槽的壁面上,在直线驱动机构控制下(例如直线气缸或丝杠机构)沿着反推器导气槽的壁面前后移动,用于锁止处于翻转状态的折门反推器。上、下折门反推器在其远离对应的折门反推器轴的一端,设有与上、下锁板配合的锁板卡舌。所述上反推器伸缩挡板48831、下反推器伸缩挡板48832设置在上、下反推器导气槽的内端口处,在直线驱动机构(未图示)控制下,通过前后方向的直线往复运动控制上、下反推器导气槽内端口的打开与封闭,上反推器伸缩挡板48831、下反推器伸缩挡板48832可通过上伸缩挡板口48841、下伸缩挡板口48842收纳在悬浮板壳体内。所述上安全锁板48871通过上安全锁板轴48881安装在上反推器导气槽48861外端口的后侧,下安全锁板48872通过下安全锁板轴48882安装在下反推器导气槽48862外端口的后侧,且所述上安全锁板轴48881、下安全锁板轴48882上安装有用于控制上、下安全锁板复位的扭簧(未图示)。上述的旋转驱动机构、直线驱动机构安装在悬浮板壳体内,由B单片机控制运行。 |
| 所述停靠坞5顺着磁基2的延伸方向,沿途设置多个,位于磁基2的一侧。一个停靠站内可设置多个并排的停靠坞5。所述停靠坞5包括壳体、控制器、操作面板51、悬浮板限位机构和公供电口54等组成部分。 |
| 所述控制器包括C单片机52和第三通信模块。所述操作面板51上设有信息输入装置,操作面板51与C单片机52相连,C单片机52通过第三通信模块与总控制系统的后台服务器连接,由后台服务器根据用户输入的信息和预存的信息,判断该用户是否有使用权限。所述公供电口54、母充电口45为磁吸设计,所述公供电口54包括公供电口永磁体541、公供电口导电片542、供电导线543;所述母充电口45包括母充电口壳体451、母充电口弹簧452、母充电口永磁体453、母充电口导电片454、充电导线455。所述公供电口54为半球形突出结构,外周为环形公供电口永磁体541,中间为公供电口导电片542,公供电口导电片542与供电导线543相连,供电导线543与高能蓄电电池组22相连。母充电口45为半球形下凹结构,与公供电口形状适配,外周为可上下活动的环形母充电口永磁体453,中间为母充电口导电片454,所述母充电口永磁体453与公供电口永磁体541磁性相吸,大小一致,底部与母充电口弹簧452相连可实现弹动,所述母充电口导电片454与充电导线455相连,所述充电导线455与小型高能电池组47连接。通过悬浮板限位机构,将悬浮板4停放在停靠坞5内的指定位置,公供电口54和母充电口45自动相吸触碰,实现通路,从而实现快速充电。 |
| 本实施例中,所述悬浮板限位机构采用磁力吸附固定的方式锁止悬浮板4,如图8所示,停靠坞壳体内设有电磁铁53,悬浮板4的一侧在对应所述电磁铁53的位置设有永磁体或导磁材料制成的锁块46,将悬浮板4靠近停靠坞5的电磁铁53,电磁铁53通电,与所述锁块46相吸附,电磁铁53失电,则悬浮板4被释放,所述电磁铁53的通断电由C单片机52控制。 |
| 本发明交通系统通过磁基的铁芯线圈产生高频电磁场,悬浮金属板44表面在变化的磁场中感应产生涡流,形成感生磁场,与原交变磁场方向相反,产生斥力作用,通过改变磁基高频源的功率使电磁力与重力达到平衡,悬浮金属板就可以悬浮在空中, |
| 工作流程: |
| (1)用户通过停靠坞5上的操作面板51输入用户身份验证信息,由停靠坞控制器将用户信息和本停靠坞的位置信息传递给总控制系统,在总控制系统的后台服务器中完成对用户身份的验证,并向该停靠坞5的控制器发送验证结果,若用户无权限使用,则拒绝使用,操作面板51发出提示或警告;若用户有权使用,则通过C单片机52给该停靠坞5的电磁铁53断电,解锁悬浮板4,用户可从停靠坞5中将悬浮板4移出,与此同时,总控制系统向该停靠坞附近的多个第一磁基单元发送信息,使附近的多个第一磁基单元通电产磁,通过磁性斥力,使位于第二磁基单元上方的悬浮板以悬浮的状态直接挪移到最近的第一磁基单元上方。 |
| (2)用户通过悬浮板4的操作面板41输入目标停靠坞5地址,甚至于所需要的行驶速度。为了便于用户在行驶的悬浮板4上保持稳定,可在所述悬浮板上增设扶手,并将操作面板设置于扶手上。 |
| (3)在悬浮板的启动过程中,可以直接采用喷气系统48启动悬浮板4。或者,用户可通过脚蹬地面的方式辅助启动,在悬浮板具有一定速度后,通过悬浮板控制器启动喷气系统48提速。根据速度传感器对B单片机42的反馈,当悬浮板达到用户期待的行驶速度后,B单片机42通过对喷气系统48发动机功率的调节,使悬浮板保持均速。在行驶过程中,悬浮板控制器42通过第二通信模块向总控制系统实时发送自己的在轨道上定位信息和速度信息,由总控制系统判断何时开启前方的哪些第一磁基单元,何时关闭或待机后方的哪些第一磁基单元。 |
| (4)当接近目的地时,喷气系统48的反推机构488启动,产生反向推力,实现停止运行。 |
| (5)用户将悬浮板6推到目标停靠坞5中,根据悬浮板6反馈的位置信息,总控制系统向对应的停靠坞控制器52发送信息,控制其电磁铁53通电,将悬浮板锁定,与此同时,悬浮板母充电口45与停靠坞公供电口54接触相吸,悬浮板4充电,充电完毕后,悬浮板控制器控制断电,准备投入下一次使用。 |
| 如图12所示,设701D对应的位置为用户的出发地,喷气系统48通电,产生一个向702D方向的水平推动力,因为悬浮板4悬浮在空中,受到的阻力较小,在有了一个初速度后,将实现向702D方向运行,若需要向702D方向加速运行,可以将喷气式发动机483的功率调节到最大,若发动机功率已是最大,可通过开启加热装置485实现对吸入的气体加热,气体经加热后体积膨胀,从而产生更大推力,实现进一步加速。若要实现向711D(右侧)方向转向,由A单片机37控制适当增大第一磁基单元左侧两个小铁芯线圈33c、33d的磁力F22和F32,减小右侧两个小铁芯线圈33b、33a的磁力F21和F31,悬浮板控制器42增大左发动机4831的功率,降低右发动机4832功率,从而实现增大左出气口48LB的排气量,减少右出气口48RB的排气量,利用悬浮板的左右速度差实现向711D方向的转向。即转向由两部分同时进行,一是磁基3产生左高右低的的斥力,悬浮板受力不平衡,悬浮板4向内侧略倾斜;二是给悬浮板4一个左快右慢的速度差,产生一个朝向转向方向的向心力.若是向左侧方向转向,则斥力左低右高,悬浮板速度左慢右快。 |
| 结合图13,对本发明的悬浮板4防止从磁基3轨道上滑离的设计进行说明,假设因外部原因,如强风、人为碰撞等,悬浮板4在702D处发生向左倾斜的情况,此时悬浮板4上的悬浮板控制器42通过陀螺仪感应到悬浮板姿态的变化,悬浮板控制器42将左发动机4831的功率增大,左进气口48LA进气增多,左出气口48LB出气增多,悬浮板4左面受到的推力增大,悬浮板4将向右略转,回到正常姿态后,悬浮板控制器42的控制模块将左发动机4831和右发动机4832功率调成一致,悬浮板4将继续向703D方向前行。为了进一步避免悬浮板4意外从磁基上脱离,在磁基的上方的位置可设置凹槽式的导轨,使悬浮板4在导轨内有一定的左右活动空间,但无法从磁基磁场中脱离,所述导轨仅在对应停靠坞5的位置设置开口,使悬浮板4可以平移到停靠坞5中,导轨凹槽的深度应使悬浮状态的悬浮板4上表面与地面6保持基本齐平。 |
| 关于悬浮板4的止停: |
| 1)悬浮板4正常运行时,喷气系统48的反推机构处于图14所示的状态,上折门反推器48811在上反推器仓48821内,下折门反推器48812在下反推器仓48822内,上反推器伸缩挡板48831和下反推器伸缩挡板48832均处于从伸缩挡板口伸出,挡住反推器导气槽内端口的状态,上安全锁板48871和下安全锁板48872均处于闭合挡住反推器到其槽外端口状态,上锁板48851和下锁板48852均处于收缩状态,气流从导气通道487的出气口通过,产生正向推力; |
| 2)接近目的地时,如图15所示,喷气系统48的反推机构488启动,上反推器伸缩挡板48831收缩,打开上反推器导气槽48861的内端口,下反推器伸缩挡板48832收缩,打开上下反推器导气槽48862的内端口;上折门反推器48811绕上折门反推器轴48801逆时针旋转45度,下折门反推器48812绕下折门反推器轴48802顺时针旋转45度,上折门反推器48811和下折门反推器48812将喷气系统导气通道487锁住,上锁板48851伸出将上折门反推器48811锁住,下锁板48852伸出将下折门反推器48812锁住,流入导气通道487末端的气流从上反推器导气槽48861和下反推器导气槽48622出气,在气流冲击下,上安全锁板48871 绕上安全锁板轴48881顺时针旋转打开,下安全锁板48872绕下安全锁板轴48882逆时针旋转打开,产生反向推力,实现减速及停止,当悬浮板停止后,B单片机控制喷气系统48关闭,上、下安全锁板在扭簧作用下复位。 |
| 实施例二: |
| 所述磁基3、悬浮板4与停靠坞5与总控制系统的通信连接为远距离通信,可采用GPRS网络通信技术。 |
| 本实施例中,所述第一、第二、第三通信模块还包括设有近距离通信设备,如蓝牙,悬浮板4与磁基3、停靠坞5之间通过所述近距离通信设备建立连接,磁基3、停靠坞5可直接检测到悬浮板4,并接收悬浮板4发送的信息。 |
| 假设本实例中,蓝牙设备的有效通信距离为10米,则在悬浮板10米范围以内的磁基单元与停靠坞5在接收到悬浮板4的发射信号后,均从断电或待机状态转变为启动状态,开始工作运行,当磁基单元与停靠坞5检测不到悬浮板的蓝牙发射信号后,断电或处于低能耗的待机状态。 |
| 悬浮板在运行过程中的姿态信息及重力感应模块采集的信息,也可直接发送到与其建立连接的第一磁基单元中,控制相应的第一磁基单元根据悬浮板的姿态信息、重力信息对磁场作出实时的调整,使悬浮板迅速达到平衡状态。 |
| 本实施例的控制过程与实施例一的远程控制过程(即悬浮板发送信息给总控制系统,总控制系统再给对应的第一磁基单元、停靠坞发出指令)可同时采用,使磁基单元与停靠坞无论是收到总控制系统的控制信号,还是收到悬浮板发送的信息,均执行动作,以保障交通系统的安全运行,防止远距离通信单元或近距离通信单元某一方信号不佳或出现故障。 |


发明名称--一种六磁子交通系统
| 申请号 | CN201821214152 | 申请日 | 2018.07.30 | ||
| 公开(公告)号 | CN208931333U | 公开(公告)日 | 2019.06.04 | ||
| IPC分类号 | B61B13/08; B60L13/04 | 申请(专利权)人 | 南京信息工程大学; | ||
| 发明人 | 赵忠瑞; | 优先权号 |
摘要:
| 本实用新型公开了一种六磁子交通系统,包括总控制系统、太阳能集能装置、储能装置、磁基、悬浮板和停靠坞;所述太阳能集能装置包括立在地面上方的太阳能电池板;所述储能装置包括储能装置壳体和安装在储能装置壳体内的蓄电电池组,所述蓄电电池组的电能输入端与所述太阳能电池板的电能输出端连接;所述磁基设置在地面以下,由按照规划行驶路线铺排的多个磁基单元组成,其中包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置第一磁基单元的一侧,位于所述停靠坞的下方。本实用新型基于磁悬浮技术实现,结构规划合理,操作方便,且占地面积小,不易产生拥堵,能够有效的提高交通运输的效率。 |
摘要附图:
| 权利要求书 |
| 1.一种六磁子交通系统,其特征在于,包括总控制系统、太阳能集能装置(1)、储能装置(2)、磁基(3)、悬浮板(4)和停靠坞(5); |
| 所述太阳能集能装置(1)包括立在地面上方的太阳能电池板(11); |
| 所述储能装置(2)包括储能装置壳体(21)和安装在储能装置壳体(21)内的蓄电电池组(22),所述蓄电电池组(22)的电能输入端与所述太阳能电池板(11)的电能输出端连接; |
| 所述磁基(3)设置在地面以下,由按照规划行驶路线铺排的多个磁基单元组成,其中包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置第一磁基单元的一侧,位于所述停靠坞(5)的下方; |
| 所述第一磁基单元包括磁基壳体(31),磁基壳体(31)的内腔构成了磁基仓(32),所述磁基仓(32)内安装有高频电流发生器、多个铁芯线圈、第一通信模块和A单片机(37);所述的多个铁芯线圈包括位于磁基仓(32)左侧的前后两个小铁芯线圈,位于磁基仓(32)右侧的前后两个小铁芯线圈,以及位于四个小铁芯线圈中部的前后两个大铁芯线圈;所述高频电流发生器的输入端与储能装置(2)连接,其输出端输出方波高频电流,两个大铁芯线圈、四个小铁芯线圈分别与所述高频电流发生器连接,使所述大、小铁芯线圈在通电时产生高频磁通,形成高频磁场;各大、小铁芯线圈与高频电流发生器的连接电路上分别设置有电流调节器,所述电流调节器与所述A单片机(37)连接,根据A单片机(37)发送的控制信号,调节对应的铁芯线圈上的电流,达到调节磁场的目的,所述A单片机(37)通过第一通信模块与所述总控制系统连接; |
| 所述第二磁基单元包括磁基壳体内腔构成的磁基仓,其磁基仓内安装有高频电流发生器、铁芯线圈、第一通信模块和A单片机,第二磁基单元的高频电流发生器的输入端与储能装置(2)连接,其输出端与第二磁基单元的铁芯线圈连接,使其在通电时产生高频磁通,形成高频磁场,第二磁基单元的A单片机通过第一通信模块与所述总控制系统连接; |
| 所述悬浮板(4)包括踩踏板(43)、第一操作面板(41)、悬浮板控制器(42)、喷气系统(48)、电池组(47)、悬浮金属板(44)和母充电口(45),悬浮金属板(44)设在悬浮板的底面,所述踩踏板(43)设在悬浮板的顶面; |
| 悬浮板电池组(47)为可充电电池组,通过母充电口(45)与停靠坞(5)实现充电连接,为悬浮板(4)的各个耗电元器件供电; |
| 所述第一操作面板(41)通过与悬浮板控制器(42)连接,用于信息的输入与显示; |
| 所述悬浮板控制器(42)设有陀螺仪、重力感应模块、B单片机、定位模块和第二通信模块,所述B单片机通过第二通信模块与总控制系统通信连接;所述重力感应模块、陀螺仪的信号输出端与B单片机连接,所述重力感应模块用于采集悬浮板(4)承载的重力信息,所述陀螺仪用于采集悬浮板(4)的姿态信息,第一磁基单元根据上述信息调节磁场;所述定位模块与B单片机连接,用于采集悬浮板(4)在行驶路线上的位置信息; |
| 所述喷气系统(48)包括左右两个喷气单元,两喷气单元内的发动机分别与所述B单片机连接,由B单片机控制其各自的输出功率; |
| 所述停靠坞(5)顺着磁基(3)的延伸方向,沿途设置多个,位于第一磁基单元的一侧,所述停靠坞(5)包括壳体、控制器、第二操作面板(51)板、悬浮板限位机构和公供电口(54),所述控制器包括C单片机(52)和第三通信模块,停靠坞的第二操作面板(51)与所述C单片机(52)连接,所述C单片机(52)通过所述第三通信模块与总控制系统连接,所述公供电口(54)与悬浮板的母充电口(45)相匹配,并与储能装置(2)连接。 |
| 2.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 所述喷气单元内设有加热装置(485),所述加热装置(485)设置在喷气单元发动机的进气端的前侧。 |
| 3.根据权利要求1或2所述的一种六磁子交通系统,其特征在于: |
| 所述喷气单元内设有反推机构(488),所述悬浮板(4)的壳体内设有左右两个前后贯通的导气通道(487),两喷气单元分别设置在相应的导气通道内,在所述导气通道内,所述反推机构(488)设置在喷气单元发动机出气端的后侧,导气通道出气口之前; |
| 所述反推机构(488)在导气通道(487)上、下两侧分别设有一反推器导气槽,并设有分别控制反推器导气槽以及导气通道(487)出气口打开或关闭的阀结构,所述反推器导气槽的外端口可与外部大气连通,内端口与所述导气通道(487)连通,整体向悬浮板前进方向倾斜,用于产生反向推力,实现悬浮板的减速和停止。 |
| 4.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 所述磁基(3)、悬浮板(4)、停靠坞(5)的通信模块包括GPRS网络通信单元和蓝牙通信单元,磁基(3)、悬浮板(4)、停靠坞(5)通过GPRS网络通信单元与总控制系统通信连接;磁基单元通过蓝牙通信单元与悬浮板(4)、停靠坞(5)通信连接。 |
| 5.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 在磁基(3)的上方设置凹槽式的导轨,悬浮板(4)被放置在所述导轨的凹槽内,使悬浮板运行时,无法从磁基(3)产生的磁场中脱离,所述导轨在对应停靠坞(5)的位置设有开口,使悬浮板(4)可以平移到停靠坞(5)中。 |
| 6.根据权利要求1所述的一种六磁子交通系统,其特征在于: |
| 所述悬浮板控制器(42)设有速度传感器,所述速度传感器用于采集悬浮板的行驶速度信息,与B单片机连接。 |
| 说明书 |
| 一种六磁子交通系统 |
| 技术领域 |
| 本实用新型属于轨道交通技术领域,具体涉及一种新型的交通系统。 |
| 背景技术 |
| 在互联网信息时代的大背景下,新型交通系统将是未来的发展趋势,新型交通系统是指通过对现代信息、通信、控制等技术的集成应用,构建安全、便捷、高效、绿色的交通运输体系。目前的交通系统私有化严重,而智能交通仍然局限于单个车辆的自动驾驶,不仅会形成资源的浪费,而且有极大的安全隐患。同时,随着全球城市的高速发展,尤其是化石能源消耗量加大,对环境造成了极大的损害,未来绿色能源将是发展方向,而现在的绿色交通方向还仅局限于电动汽车,而大量的私有汽车必然会引起拥挤。 |
| 发明内容: |
| 本实用新型的技术目的是提供一种基于磁悬浮技术的六磁子交通系统,其技术方案为: |
| 一种六磁子交通系统,其特征在于,包括总控制系统、太阳能集能装置、储能装置、磁基、悬浮板和停靠坞; |
| 所述太阳能集能装置包括立在地面上方的太阳能电池板; |
| 所述储能装置包括储能装置壳体和安装在储能装置壳体内的蓄电电池组,所述蓄电电池组的电能输入端与所述太阳能电池板的电能输出端连接; |
| 所述磁基设置在地面以下,由按照规划行驶路线铺排的多个磁基单元组成,其中包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置第一磁基单元的一侧,位于所述停靠坞的下方; |
| 所述第一磁基单元包括磁基壳体,磁基壳体的内腔构成了磁基仓,所述磁基仓内安装有高频电流发生器、多个铁芯线圈、第一通信模块和A单片机;所述的多个铁芯线圈包括位于磁基仓左侧的前后两个小铁芯线圈,位于磁基仓右侧的前后两个小铁芯线圈,以及位于四个小铁芯线圈中部的前后两个大铁芯线圈;所述高频电流发生器的输入端与储能装置连接,其输出端输出方波高频电流,两个大铁芯线圈、四个小铁芯线圈分别与所述高频电流发生器连接,使所述大、小铁芯线圈在通电时产生高频磁通,形成高频磁场;各大、小铁芯线圈与高频电流发生器的连接电路上分别设置有电流调节器,所述电流调节器与所述A单片机连接,根据A单片机发送的控制信号,调节对应的铁芯线圈上的电流,达到调节磁场的目的,所述A单片机通过第一通信模块与所述总控制系统连接; |
| 所述第二磁基单元包括磁基壳体内腔构成的磁基仓,其磁基仓内安装有高频电流发生器、铁芯线圈、第一通信模块和A单片机,第二磁基单元的高频电流发生器的输入端与储能装置连接,其输出端与第二磁基单元的铁芯线圈连接,使其在通电时产生高频磁通,形成高频磁场,第二磁基单元的A单片机通过第一通信模块与所述总控制系统连接; |
| 所述悬浮板包括踩踏板、第一操作面板、悬浮板控制器、喷气系统、电池组悬浮金属板和母充电口,悬浮金属板设在悬浮板的底面,所述踩踏板设在悬浮板的顶面; |
| 悬浮板电池组为可充电电池组,通过母充电口与停靠坞实现充电连接,为悬浮板的各个耗电元器件供电; |
| 所述第一操作面板通过与悬浮板控制器连接,用于信息的输入与显示; |
| 所述悬浮板控制器设有陀螺仪、重力感应模块、B单片机、定位模块和第二通信模块,所述B单片机通过第二通信模块与总控制系统通信连接;所述重力感应模块、陀螺仪的信号输出端与B单片机连接,所述重力感应模块用于采集悬浮板承载的重力信息以,所述陀螺仪用于采集悬浮板的姿态信息,第一磁基单元根据上述信息调节磁场;所述定位模块与B单片机连接,用于采集悬浮板在行驶路线上的位置信息; |
| 所述喷气系统包括左右两个喷气单元,两喷气单元内的发动机分别与所述B单片机连接,由B单片机控制其各自的输出功率; |
| 所述停靠坞顺着磁基的延伸方向,沿途设置多个,位于第一磁基单元的一侧,所述停靠坞包括壳体、控制器、第二操作面板、悬浮板限位机构和公供电口,所述控制器包括C单片机和第三通信模块,停靠坞的第二操作面板与所述C单片机连接,所述C单片机通过所述第三通信模块与总控制系统连接,所述公供电口与悬浮板的母充电口相匹配。 |
| 在上述方案的基础上,进一步改进或优选的方案还包括: |
| 所述喷气单元内设有加热装置,所述加热装置设置在喷气单元发动机的进气端的前侧。 |
| 所述喷气单元内设有反推机构,所述悬浮板的壳体内设有左右两个前后贯通的导气通道,两喷气单元分别设置在相应的导气通道内,在所述导气通道内,所述反推机构设置在喷气单元发动机出气端的后侧,导气通道出气口之前; |
| 所述反推机构在导气通道上、下两侧分别设有一反推器导气槽,并设有分别控制反推器导气槽以及导气通道出气口打开或关闭的阀结构,所述反推器导气槽的外端口可与外部大气连通,内端口与所述导气通道连通,整体向悬浮板前进方向倾斜,用于产生反向推力,实现悬浮板的减速和停止。 |
| 所述磁基、悬浮板、停靠坞的通信模块包括GPRS网络通信单元和蓝牙通信单元,磁基、悬浮板、停靠坞通过GPRS网络通信单元与总控制系统通信连接;磁基单元通过蓝牙通信单元与悬浮板、停靠坞建立通信连接。 |
| 在磁基的上方设置凹槽式的导轨,悬浮板被放置在所述导轨的凹槽内,使悬浮板运行时,无法从磁基产生的磁场中脱离,所述导轨在对应停靠坞的位置设有开口,使悬浮板可以平移到停靠坞中。 |
| 所述悬浮板控制器设有速度传感器,所述速度传感器用于采集悬浮板的行驶速度信息,与B单片机连接。 |
| 有益效果: |
| 本实用新型六磁子交通系统基于磁悬浮技术实现,结构规划合理,操作方便,易于实现,且占地面积小,每条磁基上为单向行驶,不易产生拥堵等问题,能够有效的提高交通运输的效率。 |
| 附图说明 |
| 图1为实施例交通系统的整体结构示意图。 |
| 图2为实施例交通系统整体剖面结构示意图。 |
| 图3为磁基结构的示意图。 |
| 图4为悬浮板的右视结构示意图。 |
| 图5为悬浮板的左视结构示意图。 |
| 图6为悬浮板的俯视结构示意图。 |
| 图7为喷气系统的发动机结构示意图。 |
| 图8为悬浮板处于停靠状态时与停靠坞的结构示意图。 |
| 图9为公供电口与母充电口分离时的结构示意图。 |
| 图10为公供电口与母充电口充电时的结构示意图。 |
| 图11为交通系统的说明路径方向示意图; |
| 图12为悬浮板的受力分析示意图。 |
| 图13为偏移悬浮板的俯视示意图。 |
| 图14为反推装置关闭状态的示意图。 |
| 图15为反推装置关闭启动的示意图。 |
| 图中: |
| 1-太阳能集能装置;11-太阳能电池板,12-太阳能电池板柱;2-储能装置;21-储能装置壳体;22-高能蓄电电池组;3-磁基;31-磁基壳体;32-磁基仓;33R-大铁芯线圈;33L-大铁芯线圈;33a-小铁芯线圈;33b-小铁芯线圈;33c-小铁芯线圈;33d-小铁芯线圈;34-高频变压器;35-高压整流蓄能模块;36-线圈卡槽;37-A单片机;4-悬浮板;41-第一操作面板;42-B单片机;43-踩踏板;44-悬浮金属板;45-母充电口;451-母充电口壳体;452-母充电口弹簧;453-母充电口永磁体;454-母充电口导电片;46-永磁体;47-小型高能电池组;48-喷气系统;481-外壳;482-发电机固定装置;483-发动机;4831-左发动机;4832-右发动机;484-扇叶;485-加热装置;487-导气通道;48LA-左进气口;48RA-右进气口;48LB-左出气口;48RA-右出气口;5-停靠坞;51-第二操作面板;52-C单片机;53-电磁铁;54-公供电口;541-公供电口永磁体;542-公供电口导电片;6-地面;203o-导线口; |
| 701D,702D,703D,704D,705D,706D,707D,708D,709D,710D,711D,712D,713D均为该点所示意的位置;F2-大铁芯线圈33L产生的斥力;F3-大铁芯线圈33R产生的斥力;F21-小铁芯线圈33b产生的斥力;F22-小铁芯线圈33c产生的斥力;F31-小铁芯线圈33a产生的斥力;F32-小铁芯线圈33d产生的斥力。 |
| 具体实施方式 |
| 为使本实用新型的技术方案和工作原理更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,下文实施例仅用于解释本实用新型,并不作为对本实用新型的实施方式的唯一限定。 |
| 实施例一: |
| 如图1、图2所示的一种六磁子交通系统,包括总控制系统、太阳能集能装置1、储能装置2、磁基3、悬浮板4和停靠坞5等组成部分。 |
| 所述太阳能集能装置1包括太阳能电池板11和太阳能电池板柱12,所述太阳能电池板11通过太阳能电池板柱12立在底面上方,根据预先规划的行驶路线,每隔每隔一定距离设定一个太阳能集能装置1,从而实现充分利用清洁能源太阳能。 |
| 所述储能装置2包括储能装置壳体21和设置在储能装置壳体21内的高能蓄电电池组22,所述高能蓄电电池组22的电能输入端与太阳能电池板11的电能输出端连接。所述储能装置2设置在地面以下,每个太阳能集能装置1对应至少一个储能装置2,储能装置壳体21上面设置有导线口203o,储能装置2为磁基3和停靠坞5供电。 |
| 所述磁基3设置在地面6以下,位于所述储能装置2的上方,由按照规划行驶路线铺排的多个磁基单元组成,所述磁基单元包括第一磁基单元和第二磁基单元,所述第一磁基单元设置在行驶路线的正下方,所述第二磁基单元设置在停靠坞5的下方。 |
| 如图3所示,所述第一磁基单元设有磁基壳体31,磁基壳体31的内腔构成了磁基仓32,所述磁基仓32内安装有高频电流发生器、大铁芯线圈33R、大铁芯线圈33L、小铁芯线圈33a、小铁芯线圈33b、小铁芯线圈33c、小铁芯线圈33d、A单片机37和第一通信模块。 |
| 所述高频电流发生器的输入端与储能装置2连接,将高能蓄电电池组22输出的直流电,经过变频逆变后,输出方波高频电流,在上述大、小铁芯线圈中产生高频磁通,形成高频磁场。所述高频电流发生器内设有三极管和高频变压器34组成的振荡电路,以及高压整流蓄能模块35,高能蓄电电池组22的输出经过振荡电路变为高频高压交流电,再经过高压整流和电容蓄能,用电容的高压储存电荷对线圈放电,可产生很强的磁场。考虑到太阳能电池板产能不足或产生故障的情况,可将外部电网作为备用电源,即高能蓄电电池组22设有与外部电网连接的充电端口。 |
| 所述磁基仓32的底面设有前后两个相同的线圈卡槽36,每个线圈卡槽36内安装一个大铁芯线圈和两个小铁芯线圈,使四个小铁芯线圈位于磁基仓32的四角,两个大铁芯线圈位于四个小铁芯线圈的中间,六个铁芯线圈以线圈卡槽36的中线为对称中心线,结构对称。磁基仓32的前后两侧各设有一个A单片机37,每个A单元机37控制一个线圈卡槽36内安装的一组线圈(包括一个大铁芯线圈和两个小铁芯线圈)。两个大铁芯线圈、四个小铁芯线圈分别与所述高频电流发生器连接,且上述铁芯线圈与高频电流发生器的连接电路上设置有电流调节器和开关器件,所述电流调节器、开关器件分别与所述A单片机37连接,电流调节器根据A单片机37发送的控制信号,调节铁芯线圈上的电流,达到调节磁场的目的,电流调节器针对每个铁芯线圈单独配置,即电流调节器与大小铁芯线圈一一匹配,而所述开关器件,与同一个A单盘机37连接的小铁芯线圈可共用一个。所述A单片机37的工作电源由储能装置2或外部电网提供,A单片机37通过第一通信模块与所述总控制系统连接,根据总控制系统发送的信息控制各铁芯线圈电路的通断和对电流大小的调节。 |
| 所述磁基仓32的底面设有导线口203o,所述导线口203o用于高能蓄电电池组22与高频电流发生器的连接。 |
| 所述第一磁基单元中,大铁芯线圈用于产生托起悬浮板4的主要磁力,小铁芯线圈主要用于对悬浮板4左右平衡的调节,以完成转向和偏心调整等过程,所述第二磁基单元仅需要保持悬浮板4的悬浮状态即可,故可以省略电流调节器和小铁芯线圈。本实施例中,所述第二磁基单元与第一磁基单元结构采用相同的结构,在第一磁基单元的结构基础上,第二磁基单元顶面增设了用于高能蓄电电池组22与停靠坞5供电连接的导线口。 |
| 如图4、图5所示,所述悬浮板4包括踩踏板43、第一操作面板41、悬浮板控制器42、喷气系统48、小型高能电池组47、悬浮金属(如铜或铝)板44和母充电口45等组成部分。所述小型高能电池组47为可充电高能电池组,通过母充电口45与停靠坞5实现连接充电,为悬浮板4的各个耗电元器件供电。悬浮金属板44设在悬浮板4最下面,所述踩踏板43设在悬浮板4最上面。所述喷气系统48由发动机483、加热装置485、反推机构488等构成。 |
| 所述第一操作面板41通过导线与悬浮板控制器42连接,用于信息的输入与显示。所述小型高能电池组为第一操作面板41、悬浮板控制器42供能。所述悬浮板控制器42包括陀螺仪、重力感应模块、速度传感器、B单片机、定位模块和第二通信模块等组成部分,B单片机通过第二通信模块与总控制系统进行信息的传递,所述重力感应模块用于采集悬浮板承载的重力信息以及重力在悬浮板上的分布状况(例如重心是否平稳,重心产生了怎样的偏移等),所述陀螺仪用于采集悬浮板的姿态信息,所述速度传感器用于采集悬浮板的行驶速度信息,B单片机将上述信息发送给总控制系统,总控制系统再向对应的第一磁基单元内的A单片机37发出控制指令。A单片机通过电流调节器,根据悬浮板4承载的重力调节大铁芯线圈或所有铁芯线圈的电流,实现对整体磁场的调整;根据悬浮板4悬浮板的姿态和/或重心的偏移情况,调整小铁芯线圈电流,实现对局部磁场的调整,以达到对悬浮板4平稳控制的目的。所述定位模块与B单片机连接,用于采集悬浮板4在行驶路线上的位置信息,总控制系统根据所述定位模块反馈的信息,控制悬浮板4前方的第一磁基单元启动,而路过的第一磁基单元断电或处于待机(低能耗)的状态,以避免能源的浪费。所述定位模块可采用GPS定位技术、北斗定位或网络定位技术。 |
| 如图6所示,所述喷气系统48设有左右两个喷气单元,下面以右侧喷气单元为例进行结构的详细说明: |
| 如图4所示,悬浮板4的前端下部设有右进气口48RA,悬浮板4后端设有右出气口48RB,所述右进气口48RA与右出气口48RB通过导气通道487连通,右侧喷气单元安装在所述导气通道487内。如图7所示,右侧喷气单元设有安装壳体481,所述安装壳体内安装有右喷气式发动机4832,所述加热装置485设置在发动机扇叶484的前端,固定在所述安装壳体481内。 |
| 左侧喷气单元与右侧喷气单元结构对称,发动机设置左右两个,即左喷气式发动机4831和右喷气式发动机4832,是为了实现更好地控制转向。经过左右两个导气通道487的连接,悬浮板从左进气口48LA和48RA进气,从48LB和48RB出气。所述悬浮板控制器42与左右两个喷气器发动机以及加热装置连接,控制发动机的输出功率和加热装置的启闭。 |
| 所述加热装置485,主体由电阻片构成,当悬浮板的速度需要再提高或需要更大动力时,可通过加热吸入的空气,使空气体积膨胀,被排出的气体体积变大,从而实现更大推力和更大速度。 |
| 所述反推机构由上折门反推器轴48801、下折门反推器轴48802、上折门反推器48811、下折门反推器48812、上反推器仓48821、下反推器仓48822、上反推器伸缩挡板48831、下反推器伸缩挡板48832、上伸缩挡板口48841、下伸缩挡板口48842、上锁板48851、下锁板48852、上反推器导气槽48861、下反推器导气槽48862、上安全锁板48871、下安全锁板48872、上安全锁板轴48881、下安全锁板轴48882等构成。 |
| 下面以右侧喷气单元的反推机构488为例进行进一步说明,反推机构488设置在右喷气式发动机4832后方的导气通道内。 |
| 如图14、15所示,导气通道487上方的悬浮板壳体内设有上反推器仓48821和与上反推器导气槽48861,导气通道487下方的悬浮板壳体内设有下反推器仓48822和下反推器导气槽48861。所述上、反推器导气槽朝着悬浮板4行进的方向倾斜,且内外贯通,其内端口与导气通道487连通,且内端口的一侧设有上伸缩挡板口48841、下伸缩挡板口48842。所述的上、下反推器仓内分别用于收纳上折门反推器48811和下折门反推器48812,上反推器仓48821的底部与上反推器导气槽48861的底部连通相接,下反推器仓48822的上部与下反推器导气槽48861的上部连通相接,所述上折门反推器48811通过上折门反推器轴48801安装在上反推器仓48821的内(下)端口的后侧,下折门反推器48812通过下折门反推器轴48802安装在下反推器仓48822的内(上)端口的后侧,上折门反推器48811和下折门反推器48812向导气通道487内侧翻转到极限位置时可将导气通道487封闭,向上翻转,则导气通道487打开,其往复的翻转动作可通过摆动气缸(未图示)等旋转驱动机构实现;所述上锁板48851、下锁板48852安装在对应的反推器导气槽的壁面上,在直线驱动机构控制下(例如直线气缸或丝杠机构)沿着反推器导气槽的壁面前后移动,用于锁止处于翻转状态的折门反推器。上、下折门反推器在其远离对应的折门反推器轴的一端,设有与上、下锁板配合的锁板卡舌。所述上反推器伸缩挡板48831、下反推器伸缩挡板48832设置在上、下反推器导气槽的内端口处,在直线驱动机构(未图示)控制下,通过前后方向的直线往复运动控制上、下反推器导气槽内端口的打开与封闭,上反推器伸缩挡板48831、下反推器伸缩挡板48832可通过上伸缩挡板口48841、下伸缩挡板口48842收纳在悬浮板壳体内。所述上安全锁板48871通过上安全锁板轴48881安装在上反推器导气槽48861外端口的后侧,下安全锁板48872通过下安全锁板轴48882安装在下反推器导气槽48862外端口的后侧,且所述上安全锁板轴48881、下安全锁板轴48882上安装有用于控制上、下安全锁板复位的扭簧(未图示)。上述的旋转驱动机构、直线驱动机构安装在悬浮板壳体内,由B单片机控制运行。 |
| 所述停靠坞5顺着磁基2的延伸方向,沿途设置多个,位于磁基3的一侧。一个停靠站内可设置多个并排的停靠坞5。所述停靠坞5包括壳体、控制器、第二操作面板51、悬浮板限位机构和公供电口54等组成部分。 |
| 所述控制器包括C单片机52和第三通信模块。所述第二操作面板51上设有信息输入装置,第二操作面板51与C单片机52相连,C单片机52通过第三通信模块与总控制系统的后台服务器连接,由后台服务器根据用户输入的信息和预存的信息,判断该用户是否有使用权限。所述公供电口54、母充电口45为磁吸设计,所述公供电口54包括公供电口永磁体541、公供电口导电片542、供电导线543;所述母充电口45包括母充电口壳体451、母充电口弹簧452、母充电口永磁体453、母充电口导电片454、充电导线455。所述公供电口54为半球形突出结构,外周为环形公供电口永磁体541,中间为公供电口导电片542,公供电口导电片542与供电导线543相连,供电导线543与高能蓄电电池组22相连。母充电口45为半球形下凹结构,与公供电口形状适配,外周为可上下活动的环形母充电口永磁体453,中间为母充电口导电片454,所述母充电口永磁体453与公供电口永磁体541磁性相吸,大小一致,底部与母充电口弹簧452相连可实现弹动,所述母充电口导电片454与充电导线455相连,所述充电导线455与小型高能电池组47连接。通过悬浮板限位机构,将悬浮板4停放在停靠坞5内的指定位置,公供电口54和母充电口45自动相吸触碰,实现通路,从而实现快速充电。 |
| 本实施例中,所述悬浮板限位机构采用磁力吸附固定的方式锁止悬浮板4,如图8所示,停靠坞壳体内设有电磁铁53,悬浮板4的一侧在对应所述电磁铁53的位置设有永磁体或导磁材料制成的锁块46,将悬浮板4靠近停靠坞5的电磁铁53,电磁铁53通电,与所述锁块46相吸附,电磁铁53失电,则悬浮板4被释放,所述电磁铁53的通断电由C单片机52控制。 |
| 本实用新型交通系统通过磁基的铁芯线圈产生高频电磁场,悬浮金属板44表面在变化的磁场中感应产生涡流,形成感生磁场,与原交变磁场方向相反,产生斥力作用,通过改变磁基高频源的功率使电磁力与重力达到平衡,悬浮金属板就可以悬浮在空中, |
| 工作流程: |
| (1)用户通过停靠坞5上的第二操作面板51输入用户身份验证信息,由停靠坞控制器将用户信息和本停靠坞的位置信息传递给总控制系统,在总控制系统的后台服务器中完成对用户身份的验证,并向该停靠坞5的控制器发送验证结果,若用户无权限使用,则拒绝使用,第二操作面板51发出提示或警告;若用户有权使用,则通过C单片机52给该停靠坞5的电磁铁53断电,解锁悬浮板4,用户可从停靠坞5中将悬浮板4移出,与此同时,总控制系统向该停靠坞附近的多个第一磁基单元发送信息,使附近的多个第一磁基单元通电产磁,通过磁性斥力,使位于第二磁基单元上方的悬浮板以悬浮的状态直接挪移到最近的第一磁基单元上方。 |
| (2)用户通过悬浮板4的第一操作面板41输入目标停靠坞5地址,甚至于所需要的行驶速度。为了便于用户在行驶的悬浮板4上保持稳定,可在所述悬浮板上增设扶手,并将第一操作面板设置于扶手上。 |
| (3)在悬浮板的启动过程中,可以直接采用喷气系统48启动悬浮板4。或者,用户可通过脚蹬地面的方式辅助启动,在悬浮板具有一定速度后,通过悬浮板控制器启动喷气系统48提速。根据速度传感器对B单片机42的反馈,当悬浮板达到用户期待的行驶速度后,B单片机42通过对喷气系统48发动机功率的调节,使悬浮板保持均速。在行驶过程中,悬浮板控制器42通过第二通信模块向总控制系统实时发送自己的在轨道上定位信息和速度信息,由总控制系统判断何时开启前方的哪些第一磁基单元,何时关闭或待机后方的哪些第一磁基单元。 |
| (4)当接近目的地时,喷气系统48的反推机构488启动,产生反向推力,实现停止运行。 |
| (5)用户将悬浮板6推到目标停靠坞5中,根据悬浮板6反馈的位置信息,总控制系统向对应的停靠坞控制器52发送信息,控制其电磁铁53通电,将悬浮板锁定,与此同时,悬浮板母充电口45与停靠坞公供电口54接触相吸,悬浮板4充电,充电完毕后,悬浮板控制器控制断电,准备投入下一次使用。 |
| 如图12所示,设701D对应的位置为用户的出发地,喷气系统48通电,产生一个向702D方向的水平推动力,因为悬浮板4悬浮在空中,受到的阻力较小,在有了一个初速度后,将实现向702D方向运行,若需要向702D方向加速运行,可以将喷气式发动机483的功率调节到最大,若发动机功率已是最大,可通过开启加热装置485实现对吸入的气体加热,气体经加热后体积膨胀,从而产生更大推力,实现进一步加速。若要实现向711D(右侧)方向转向,由A单片机37控制适当增大第一磁基单元左侧两个小铁芯线圈33c、33d的磁力F22和F32,减小右侧两个小铁芯线圈33b、33a的磁力F21和F31,悬浮板控制器42增大左发动机4831的功率,降低右发动机4832功率,从而实现增大左出气口48LB的排气量,减少右出气口48RB的排气量,利用悬浮板的左右速度差实现向711D方向的转向。即转向由两部分同时进行,一是磁基3产生左高右低的的斥力,悬浮板受力不平衡,悬浮板4向内侧略倾斜;二是给悬浮板4一个左快右慢的速度差,产生一个朝向转向方向的向心力.若是向左侧方向转向,则斥力左低右高,悬浮板速度左慢右快。 |
| 结合图13,对本实用新型的悬浮板4防止从磁基3轨道上滑离的设计进行说明,假设因外部原因,如强风、人为碰撞等,悬浮板4在702D处发生向左倾斜的情况,此时悬浮板4上的悬浮板控制器42通过陀螺仪感应到悬浮板姿态的变化,悬浮板控制器42将左发动机4831的功率增大,左进气口48LA进气增多,左出气口48LB出气增多,悬浮板4左面受到的推力增大,悬浮板4将向右略转,回到正常姿态后,悬浮板控制器42的控制模块将左发动机4831和右发动机4832功率调成一致,悬浮板4将继续向703D方向前行。为了进一步避免悬浮板4意外从磁基上脱离,在磁基的上方的位置可设置凹槽式的导轨,使悬浮板4在导轨内有一定的左右活动空间,但无法从磁基磁场中脱离,所述导轨仅在对应停靠坞5的位置设置开口,使悬浮板4可以平移到停靠坞5中,导轨凹槽的深度应使悬浮状态的悬浮板4上表面与地面6保持基本齐平。 |
| 关于悬浮板4的止停: |
| 1)悬浮板4正常运行时,喷气系统48的反推机构处于图14所示的状态,上折门反推器48811在上反推器仓48821内,下折门反推器48812在下反推器仓48822内,上反推器伸缩挡板48831和下反推器伸缩挡板48832均处于从伸缩挡板口伸出,挡住反推器导气槽内端口的状态,上安全锁板48871和下安全锁板48872均处于闭合挡住反推器到其槽外端口状态,上锁板48851和下锁板48852均处于收缩状态,气流从导气通道487的出气口通过,产生正向推力; |
| 2)接近目的地时,如图15所示,喷气系统48的反推机构488启动,上反推器伸缩挡板48831收缩,打开上反推器导气槽48861的内端口,下反推器伸缩挡板48832收缩,打开上下反推器导气槽48862的内端口;上折门反推器48811绕上折门反推器轴48801逆时针旋转45度,下折门反推器48812绕下折门反推器轴48802顺时针旋转45度,上折门反推器48811和下折门反推器48812将喷气系统导气通道487锁住,上锁板48851伸出将上折门反推器48811锁住,下锁板48852伸出将下折门反推器48812锁住,流入导气通道487末端的气流从上反推器导气槽48861和下反推器导气槽48622出气,在气流冲击下,上安全锁板48871 绕上安全锁板轴48881顺时针旋转打开,下安全锁板48872绕下安全锁板轴48882逆时针旋转打开,产生反向推力,实现减速及停止,当悬浮板停止后,B单片机控制喷气系统48关闭,上、下安全锁板在扭簧作用下复位。 |
| 实施例二: |
| 所述磁基3、悬浮板4与停靠坞5与总控制系统的通信连接为远距离通信,可采用GPRS网络通信技术。 |
| 本实施例中,所述第一、第二、第三通信模块还包括设有近距离通信设备,如蓝牙,悬浮板4与磁基3、停靠坞5之间通过所述近距离通信设备建立连接,磁基3、停靠坞5可直接检测到悬浮板4,并接收悬浮板4发送的信息。 |
| 假设本实例中,蓝牙设备的有效通信距离为10米,则在悬浮板10米范围以内的磁基单元与停靠坞5在接收到悬浮板4的发射信号后,均从断电或待机状态转变为启动状态,开始工作运行,当磁基单元与停靠坞5检测不到悬浮板的蓝牙发射信号后,断电或处于低能耗的待机状态。 |
| 悬浮板在运行过程中的姿态信息及重力感应模块采集的信息,也可直接发送到与其建立连接的第一磁基单元中,控制相应的第一磁基单元根据悬浮板的姿态信息、重力信息对磁场作出实时的调整,使悬浮板迅速达到平衡状态。 |
| 本实施例的控制过程与实施例一的远程控制过程(即悬浮板发送信息给总控制系统,总控制系统再给对应的第一磁基单元、停靠坞发出指令)可同时采用,使磁基单元与停靠坞无论是收到总控制系统的控制信号,还是收到悬浮板发送的信息,均执行动作,以保障交通系统的安全运行,防止远距离通信单元或近距离通信单元某一方信号不佳或出现故障。 |




 浙公网安备 33010602011771号
浙公网安备 33010602011771号