- 从狭义上说,通常把具有时间周期性的运动称为振动。
- 从广义上说,任何一个物理量在某一数值附近作周期性的变化,都称为振动。(交流电中的电压、电流,电磁 振荡等)
- 机械振动(振动)是物体在一定位置附近所作的周期性往复的运动
简谐运动
- 在一切振动中,最简单和最基本的振动称为简谐运动。
- 物体运动时,如果离开平衡位置的位移(或角位移)按 余(正)弦函数的规律随时间变化
\[x=A\cos(\omega t+\varphi)
\]
参量含义
\(A\):振幅
\(\omega\):角频率
\(\varphi\):初相
\(T\):周期,\(T=\frac{2\pi}{\omega}\)
\(f\):频率,\(f=\frac{1}{T}\)
\(\phi = \omega t+\varphi\):相,决定物体的运动状态。
运动学特征
\[v=\frac{dx}{dt} =-A\omega\sin(\omega t+\varphi)=A\omega \cos(\omega t+\varphi+\frac{\pi}{2})
\]
\[a=\frac{dv}{dt} = -A\omega^2 \cos(\omega t+\varphi)=A\omega^2 \cos(\omega t+\varphi+\pi)
\]
不难发现
- 物体在简谐运动时,其位移、速度、加速度都是周期性变化的 \(v\) 比 \(x\) 超前\(\pi/2\), \(a\) 比 \(x\) 超前 \(\pi\)
相量图法
设平面内有一个向量 \(\vec{A}\),长度为\(A\),其圆周匀速旋转角速度为\(\omega\),\(t=0\) 时,与 \(x\) 轴成 \(\varphi\) 角,考虑向量在\(x\)轴上的投影
\[\vec x = \vec A \cdot \vec x_n = |A|\cos(\omega t+\varphi)
\]
因此简谐运动是匀速圆周运动在某一方向的投影,振幅\(A\)为该圆周的半径,角频率\(\omega\)为该矢量的角速度,\(\phi=\omega t+\varphi\) 为矢量与这个方向的夹角。
旋转矢量作匀速转动时,其端点的位置、速度、 加速度在X轴上的投影,等于一特定的简谐振动的 位移、速度、加速度
一般地,给定\(A,\omega,\varphi\)三个特征量,就唯一地确定一个简谐运动。
仅在旋转矢量法中,\(A,\omega,\varphi\)才有几何意义。
已知旋转矢量地位置,就可以求出系统在某时刻的状态。因此相 \(\phi\) 是确定系统运动状态的重要参量。
相位差
两个简谐运动的相位差为
\[x_1 = A_1\cos(\omega_1 t+\varphi_1)
\]
\[x_2 = A_2\cos(\omega_2 t+\varphi_2)
\]
\[\Delta \phi = \phi_1-\phi_2 = (\omega_1-\omega_2)t+(\varphi_1-\varphi_2)
\]
同相:当\(\Delta \phi = 2k\pi ,k \in \mathbb Z\)时,两振子同时到达同方向各自最大位移处,同时过平衡点向同方向运动,两振动步调一致
反相:当\(\Delta \phi = (2k+1)\pi ,k\in \mathbb Z\)时,两振子同时到达相反方向各自最大位移处,同时过平衡点向相反方向运动,两振动步调相反。
若\(\Delta \phi>0,\phi \not = k\pi\),则 \(x_1\) 比 \(x_2\) 更早达到正向最大,\(x_1\) 比 \(x_2\) 超前 \(\Delta \phi\) 的位相。
简谐运动的动力学特征
由前面\(v,a,x\)的表达式不难得到
\[a=-\omega^2x
\]
\[F = ma = -m\omega^2 x=-kx
\]
简谐运动微分方程为
\[F+kx = m\frac{d^2x}{dt^2}+kx=0
\]
力的大小始终与位移大小成正比,比例系数为\(k\)
\[k=m\omega^2,\omega^2 = \frac{k}{m}
\]
可以得到固有角频率和固有周期:
\[\omega = \sqrt\frac{k}{m},T=2\pi\sqrt \frac{m}{k}
\]
回复力:方向与位移的方向相反, 始终指向平衡位置的力
简谐运动的动力学定义
质点在与对平衡位置的位移成 正比,而反向的合外力的作用下的运动就是简谐运动 。
初始条件推表达式
\(t=0\)时刻的简谐运动参量为初始条件,一般为\(x_0,v_0\)。
\[x_0 = A\cos\varphi,v_0 =-A\omega \sin\varphi
\]
可以得到
\[A^2(\cos^2 \varphi+\sin^2\varphi)=x_0^2 + (\frac{v_0}{\omega})^2=A^2
\]
\[\tan \varphi = -\frac{v_0}{x_0\omega}
\]
\[A=\sqrt{x_0^2 + (\frac{v_0}{\omega})^2},\varphi =\arctan (-\frac{v_0}{\omega x_0})
\]
简谐运动的能量
- 简谐运动系统的总能量为:简谐振动系统的动能和势能之和
\[E=E_p+E_k=\frac{1}{2}kx^2+\frac{1}{2}mv^2
\]
\[E_p =\frac{1}{2}kx^2=\frac{1}{2}kA^2\cos^2(\omega t+\varphi)
\]
\[E_k = \frac{1}{2}mA^2\omega^2\sin^2(\omega t+\varphi)=\frac{1}{2}kA^2sin^2(\omega t+\varphi)
\]
所以
\[E_k+E_p = \frac{1}{2} k A^2 = Const.
\]
简谐运动的总机械能保持不变,简谐振动的过程正是动能与势能相互转换的过程,简谐运动的总机械能与振幅的平方成正比。
\[\overline{E_{\mathrm{k}}}=\frac1T\int_0^T\frac12kA^2\sin^2(\omega_0t+\varphi_0)dt=\frac14kA^2
\]
\[\overline{E_{\mathrm{P}}}=\frac1T\int_0^T\frac12kA^2\cos^2(\omega_0t+\varphi_0)dt=\frac14kA^2
\]
\[\overline{E_k} = \overline{E_p} = \frac{1}{2}E
\]
简谐运动的动能和势能的平均值相等,且等于总机械能的一半。
振幅不仅给出简谐振动运动的范围,而且还反映了振动系统总能量的大小(振动的强度)。
这些结论适用于任何简谐运动。
简谐运动的合成与分解
同振动方向、同频率的两个简谐振动的合成
\[x_1 = A_1\cos(\omega_0 t+\varphi_1)
\]
\[x_2 = A_2\cos(\omega_0 t+\varphi_2)
\]
使用旋转矢量法合成
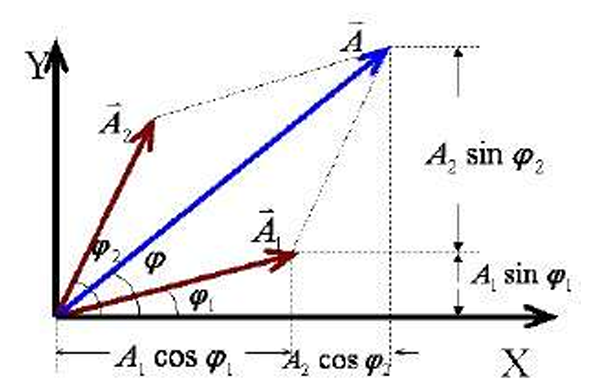
合振幅为
\[A = A_1^2+A_2^2+2A_1A_2\cos(\varphi_2-\varphi_1)
\]
合初相位为
\[\tan \varphi = \frac{A_2\sin\varphi_2 +A_1\sin\varphi_1}{A_2\cos\varphi_2+A_1\cos\varphi_1}
\]
- 结论:
- 当两振动同相时,合振幅最大;反相时,合振幅最小。
- 合振动仍是同频率的简谐振动.
- 合振幅不仅与分振幅有关还与相位差有关。
- \(|A_1-A_2|\le A\le |A_1+A_2|\)
同振动方向、不同频率的两个简谐振动的合成
\[x_1 = A_1\cos(\omega_1 t+\varphi_1)
\]
\[x_2 = A_2\cos(\omega_2 t+\varphi_2)
\]
\[\Delta \phi = (\omega_2-\omega_1)t+(\varphi_2-\varphi_1)
\]
两个旋转矢量之间的夹角会随时间而变化,故合运动不是简谐运动。
同振动方向、不同频率、同初相位的两个简谐振动的合成
\[x_1 = A_1\cos(\omega_1 t+\varphi)
\]
\[x_2 = A_2\cos(\omega_2 t+\varphi)
\]
\[x=A_1\cos(\omega_1t+\varphi)+A_1\cos(\omega_2t+\varphi)
\]
使用和差化积公式
\[x=2A_1\cos(\frac{\omega_2-\omega_1}{2}t)\cos(\frac{\omega_2+\omega_1}{2}t+\varphi)
\]
所以可以认为合运动振幅为 \(A=|2A_1\cos(\frac{\omega_2-\omega_1}{2}t)|\),\(A\in [0,2A_1]\)
振幅随时间按余弦函数变化,这种振幅出现加强和减弱现象称为拍。
可见拍的周期
\[\tau=\frac{1}2{}\frac{2\pi}{\frac{\omega_2-\omega_1}{2}} = \frac{2\pi}{\omega_2-\omega_1}
\]
拍的频率
\[\nu = \frac{1}{\tau} = \frac{\omega_2-\omega_1}{2\pi} = |\nu_2-\nu_1|
\]
拍现象只在两分振动的频率相差不太大时才显出来,即\(\omega_1+\omega_2>>|\omega_1-\omega_2|\) 时。
不同方向(垂直)、同频率的两个简谐振动的合成
阻尼振动
已知空气阻力规律为,当速度不大时,阻力与速度成正比,并方向相反;速度足够大时,与速度的平方成正比。
\[\vec f = -\gamma \vec v
\]
动力学方程
\[F+f = ma
\]
\[-kx-\gamma v = ma
\]
\[m\frac{d^2x}{dt^2}+m\omega^2x+\gamma \frac{dx}{dt}=0
\]
设阻尼系数 \(\beta\) 为
\[\beta = \frac{\gamma}{2m}
\]
\[\frac{d^2x}{dt^2}+\omega^2x+2\beta\frac{dx}{dt}=0
\]
解得
\[x(t)=C_1e^{-(\beta-\sqrt{\beta^2-\omega_0^2})t}+C_2e^{-(\beta+\sqrt{\beta^2-\omega_0^2})t}
\]
三种形态的阻尼运动
已知参量,固有频率 \(\omega_) =\sqrt \frac{k}{m}\),阻尼系数 \(\beta = \frac{\gamma}{2m}\)
过阻尼
当 \(\beta > \omega_0\) 时
\[x(t)=C_1e^{-(\beta-\sqrt{\beta^2-\omega_0^2})t}+C_2e^{-(\beta+\sqrt{\beta^2-\omega_0^2})t}
\]
临界阻尼
当 \(\beta = \omega_0\) 时
\[x(t)=(C_1+C_2)e^{-\beta t}
\]
欠阻尼
当 \(\beta < \omega_0\) 时
\[A_0e^{-\beta\cdot t}\cos(\omega t+\varphi_0)
\]
三种阻尼运动的特点
- 阻尼较小的运动为欠阻尼
- 阻尼过大时,物体运动不具有周期性,物体将从原来远离平衡位置的状态慢慢回到平衡位置
- 临界阻尼状态下,阻尼适当,系统一次性回到平衡位置,所用时间比过阻尼的情况还要短,使得物体以最短的时间一次性回到平衡位置。
阻尼运功的参量
- 振幅:\(A = A_0e^{-\beta t}\)
- 能量:\(E=E_0e^{-2\beta t}\)
- 时间常数:\(\tau = \frac{1}{2\beta}\)
- 品质因数:\(Q = 2\pi \frac{\tau}{T}=\omega \tau =\frac{\omega }{2\beta}\)
受迫振动
动力学方程
强迫力
\[F_\text{外}{=}F_0\cos\omega_\text{外}{t},F_0 = ma_0
\]
牛二方程
\[m\frac{d^2 \vec x}{dt^2}=\vec F_\text{弹}+\vec f_\text{阻}+\vec F_\text{外}
\]
\[\frac{d^2x}{dt^2}+2\beta\frac{dx}{dt}+\omega_0^2x=a_0\cos\omega_\text{外}t
\]
解得
\[x(t)=A_0e^{-\beta\cdot t}\cos(\omega t+\varphi_0)+A_p\cos(\omega_\text{外}t+\alpha)
\]
其中,\(A_0e^{-\beta\cdot t}\cos(\omega t+\varphi_0)\) 部分描述了系统的暂态行为,当时间足够长时,此项可忽略。
\(A_p\cos(\omega_\text{外}t+\alpha)\),是系统的稳定状态,是系统的稳态解。稳态时的受迫振动按简谐振动的规律变化。
受迫振动参量计算
振幅
\[A_{\mathfrak{p}}=\frac{a_0}{\sqrt{\left(\omega_0^2-\omega_\text{外}^2\right)^2+4\beta^2\omega_\text{外}^2}}
\]
位相
\[\tan\alpha=\frac{-2\beta\omega_\text{外}}{\omega_0^2-\omega_\text{外}^2}
\]
稳定受迫振动与简谐振动的区别
- 弹簧振子简谐振动:弹簧弹力即回复力;受迫振动:合外力为回复力。
- 三特征量(\(A,\omega,\varphi\))的本质不同:
- 弹簧振子:\(\omega\)由系统本身决定,\(A,\varphi\) 由初始条件决定。
- 受迫振动:\(\omega\)由外力决定,\(A,\alpha\) 由解方程计算。
- 简谐运动能量守恒,受迫振动系统阻力消耗的能量等于外力作功。
共振
定义:在一定频率条件下振幅出现极大值振动剧烈的现象。
受迫振动稳定解的振幅计算公式对外角频率求导,计算导数为0的点,即可得到频率条件
当外角频率为
\[\omega_{\mathrm{r}}=\sqrt{\omega_0^2-2\beta^2}
\]
时,振幅取得最大值
\[A_{\mathfrak{p}}=A_{\max}=\frac{a_0}{2\beta\sqrt{\omega_0^2-\beta^2}}
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号