视图变换矩阵和投影变换矩阵
变换
3D -> 2D
2D空间的变换
- 缩放变换
- 反射变换--以坐标轴翻转
- 剪切变换
假设沿着x轴正向剪切,在y高度上,每个等高线上的点沿着x轴正向移动的距离是a*y,a为y=1时x的移动距离
- 旋转变换
默认绕原点逆时针旋转\(\alpha\)度
使用齐次坐标表示变换矩阵
方便解决平移矩阵
2D变换矩阵 -> 3D变换矩阵
\(t_x,t_y\)就表示平移的移动量
同样对于2D平面内的点或者向量,也需要变为3D坐标表示,对于点可以在末尾加1即可,对于向量可以在末尾加0即可。
点:(x,y) -> (x,y,1)
向量:(x,y) -> (x,y,0)
3D空间变换
与2D平面相同,从3D->4D
点:(x,y,z) -> (x,y,z,1)
向量: (x,y,z) -> (x,y,z,0)
欧拉角
处理3D空间中绕任意轴的旋转问题,将该轴求解出与坐标轴的角度关系
\(R_{xyz}(\alpha,\beta,\gamma) = R_x({\alpha})+R_y(\beta)+R_z(\gamma)\)
MVP矩阵
- Model Trans Matrix -> 对物体实际位置的变换
- View Trans Matrix -> 对相机的变换
- Proj Trans Matrix -> 3D->2D
Viewing Trans
View Trans 视图变换
对相机位置和朝向的确定。
需要三个向量
- 相机位置 e
- 朝向 lookat g
- 向上方向 up direction l
物体如果和相机保持相对静止,那么相机的所看到的物体是一样的。
所以约定
1. 相机位置在原点,相机的朝向是-z,相机的向上方向是y
所以视图变换就是将相机位置(x,y,z)移动到(0,0,0),并旋转朝向向量和向上向量
g 旋转到 -z l 旋转到y (g×l)旋转到x
考虑从x轴,y轴,z轴旋转到g×l,l,g的矩阵。
而反过来旋转就是该矩阵的逆,也即是视图变换矩阵的旋转模块。而由于旋转矩阵是正交矩阵,所以逆就是矩阵的转置。
然后对于空间中的物体,也需要应用该矩阵实现物体的变换。
Proj Trans 投影变换
近大远小 或者 近远相同
正交变换
近远相同,对于处在约定位置的相机观测出来的图像,将物体的z值去掉,即得到投影结果。
定义空间中一个立方体[l,r]×[b,t]×[f,n],这个立方体是观测物体的包围和。然后将这个包围盒变换为中心为原点的单位立方体,可以通过平移和缩放矩阵
l,r表示在x轴上的左边界和右边界,b,t表示在y轴上的底和顶,f,n表示在z轴上的前面和后面(由于摄像机是朝z负方向的)
透视变换
近大远小
第一种方法
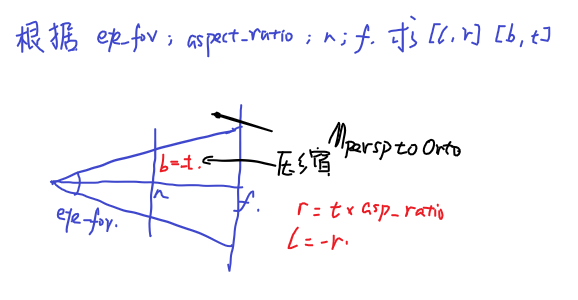
GAMES101
压缩除了n平面的所有平面,将其他平面压缩,直到整个锥体变为长方体\(M_{persp->ortho}\)
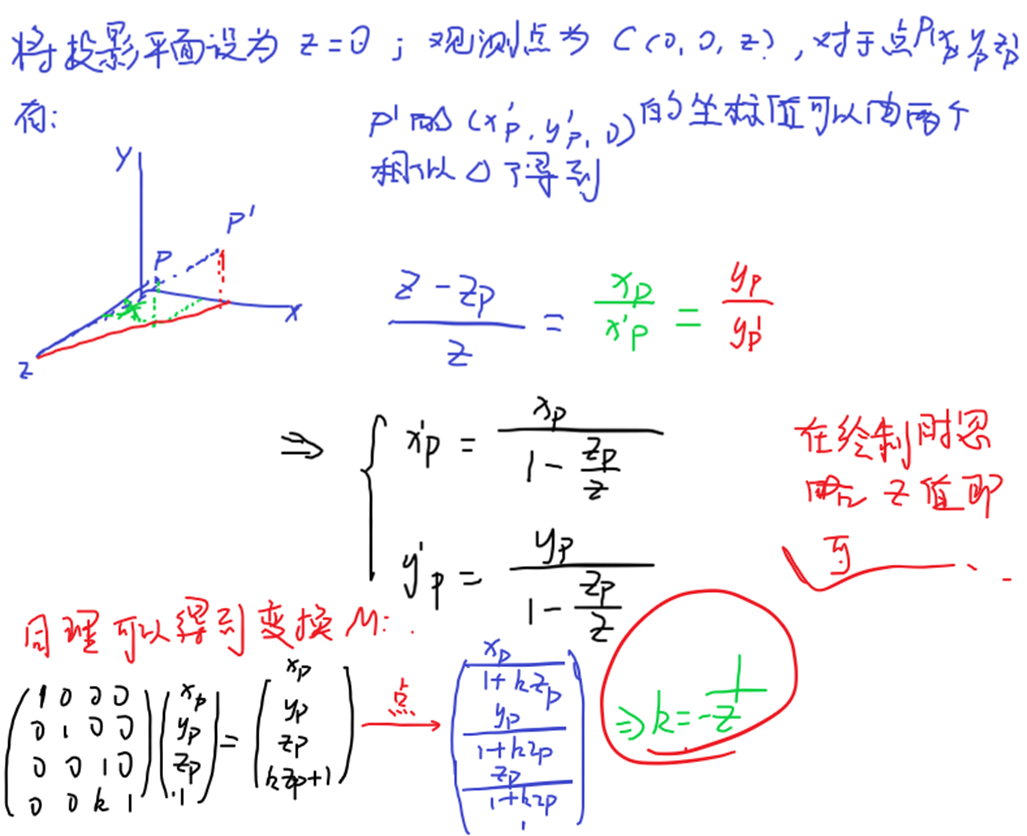
所以压缩后,x,y两值就变换为下式
此时可以初步写出\(M_{persp->ortho}\)除了第三行的矩阵
由于压缩变换不会改变z的值。那么对于变换后的值\(\begin{bmatrix}\frac{nx}{z} \\ \frac{ny}{z} \\ z \\ 1 \end{bmatrix} == \begin{bmatrix}nx \\ ny \\ z^2 \\ z \end{bmatrix}\)
可以推断出第三行格式为(0,0,A,B)
将z分别使用近平面值n和远平面值f带入即可求得两个参数
求解即得到A ,B值。
然后现在锥体就变为了长方体,再使用正交投影的矩阵相乘,即得到透视投影的变换矩阵
\(M_{persp} = M_{persp->ortho} * M_{ortho}\)
第二种方法
tinyrender

 浙公网安备 33010602011771号
浙公网安备 33010602011771号