

Dog vs Cat复现
文件夹格式
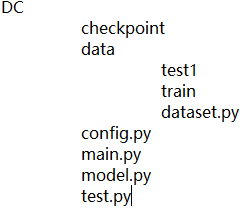
仿照着陈云的书,自己做了些修改
dataset:
注意自己写dataset时至少写__init__(self) __getitem__(self, index) __len__(self, )这几个函数
__init__用于创建地址列表,transform等操作
__getitem__返回第index个data和label dataloader中会调用这个函数
__len__可以返回data的数量
import os from PIL import Image from torch.utils import data import numpy as np import torchvision.transforms as T class DogCat(data.Dataset): #获取所有图片地址,并根据训练、验证、测试划分数据 def __init__(self, root, transforms = None, train = True, test = False): self.test = test #os.listdir(root)列出root里所有文件的名称,包括子文件夹,返回的是以字典序排序 imgs = [os.path.join(root, img) for img in os.listdir(root)] if self.test: #split('.')以.为分界线划分string,返回所有划分的子string,-2表示倒数第二个 imgs = sorted(imgs, key = lambda x : int(x.split('.')[-2].split('/')[-1])) else: imgs = sorted(imgs, key = lambda x : int(x.split('.')[-2])) imgs_num = len(imgs) #划分数据集,验证:训练 = 3 : 7 if self.test: self.imgs = imgs elif train: # self.imgs = imgs[:int(0.7 * imgs_num)] self.imgs = imgs else: self.imgs = imgs[int(0.7 * imgs_num) :] #注意测试集和验证集的区别 if transforms is None: if self.test or not train: self.transforms = T.Compose([ T.Scale((224, 224)), T.CenterCrop(224), T.ToTensor(), T.Normalize( mean = [0.485, 0.456, 0.406], std = [0.229, 0.224, 0.225])] ) else: #.RandomSizedCrop(size)随机长宽裁剪原始图片,并将裁剪后的图像resize成size * size大小 self.transforms = T.Compose([T.Scale(256),T.RandomSizedCrop(224),T.ToTensor(),T.Normalize( mean = [0.485, 0.456, 0.406],std = [0.229, 0.224, 0.225])]) def __getitem__(self, index): #用于返回图像,如果一个类中定义了__getitem__,则其对象P可以通过P[i]取值 #如果是训练集或验证集label返回标签,如果是测试集label返回序号即可 img_path = self.imgs[index] if self.test: label = int(img_path.split('.')[-2].split('/')[-1]) else: label = 1 if 'dog' in img_path.split('/')[-1] else 0 data = Image.open(img_path) data = self.transforms(data) return data, label #定义了__len__函数就能用len(P)返回P的“长度” def __len__(self): return len(self.imgs)
config:配置文件,用于保存一些超参数
class DefaultConfig(object): model = 'AlexNet' class_num = 2 train_data_root = 'C:/Users/Dell/PycharmProjects/DC/data/train' test_data_root = 'C:/Users/Dell/PycharmProjects/DC/data/test1/' checkpoint_root = 'C:/Users/Dell/PycharmProjects/DC/checkpoint' batch_size = 4 use_gpy = True num_workers = 4 print_freq = 20 debug_file = '/tmp/debug' result_file = 'result.csv' num_epochs = 1 lr = 0.1 lr_decay = 0.95 weight_decay = 1e-4
model:保存网络模型,此次用的上次写的AlexNet
import torch import torch.nn as nn import torch.nn.functional as F from config import DefaultConfig device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') class AlexNet(nn.Module): def __init__(self): super(AlexNet, self).__init__() opt = DefaultConfig() self.conv1 = nn.Conv2d(3, 96, 11, stride = 4) self.conv2 = nn.Conv2d(96, 256, 5, padding = 2) self.conv3 = nn.Conv2d(256, 384, 2, padding = 1) self.conv4 = nn.Conv2d(384, 384, 3, padding = 1) self.conv5 = nn.Conv2d(384, 256, 3, padding = 1) self.fc1 = nn.Linear((256 * 6 * 6), 4096) self.fc2 = nn.Linear(4096, 4096) self.fc3 = nn.Linear(4096, opt.class_num) def forward(self, x): x = F.max_pool2d(F.local_response_norm(F.relu(self.conv1(x)), size = 5, alpha = 0.0001, beta = 0.75, k = 2), kernel_size = 3, stride = 2) x = F.max_pool2d(F.local_response_norm(F.relu(self.conv2(x)), size = 5, alpha = 0.0001, beta = 0.75, k = 2), kernel_size = 3, stride = 2) x = F.relu(self.conv3(x)) x = F.relu(self.conv4(x)) x = F.max_pool2d(F.relu(self.conv5(x)), kernel_size = 3, stride = 2) x = x.view(x.size()[0], -1) x = F.relu(self.fc1(x)) x = F.dropout(x, p = 0.5, training = True, inplace = True) x = F.relu(self.fc2(x)) x = F.dropout(x, p = 0.5, training = True, inplace = True) x = self.fc3(x) return x
model:就是train文件
import torch.utils.data.dataloader as Dataloader import torch import fire from model import AlexNet from config import DefaultConfig from data.dataset import DogCat import torchnet.meter as meter from tqdm import tqdm from tensorboardX import SummaryWriter import os opt = DefaultConfig() device = 'cuda' if torch.cuda.is_available() else 'cpu' def train(**kwargs): tbwrite = SummaryWriter(logdir = opt.checkpoint_root) model = AlexNet() model.train() if 'checkpoint_dir' in kwargs: checkpoint = model.load(kwargs['checkpoint_dir']) model.load_state_dict(checkpoint['model']) print('model load finished') model.to(device) train_data = DogCat(root = opt.train_data_root) train_dataloader = Dataloader.DataLoader(train_data, batch_size = opt.batch_size, shuffle = True, num_workers = opt.num_workers) val_data = DogCat(root = opt.train_data_root, train = False) val_dataloader = Dataloader.DataLoader(val_data, batch_size = opt.batch_size, shuffle = True, num_workers = opt.num_workers) optimizer = torch.optim.Adam(model.parameters(), lr = opt.lr) loss = torch.nn.CrossEntropyLoss() loss_meter = meter.AverageValueMeter() previous_loss = 1e100 for epoch in range(opt.num_epochs): total_loss = 0 total_true = 0 cnt = 0 img_total = 0 for i, (data, label) in tqdm(enumerate(train_dataloader)): data.to(device) label.to(device) optimizer.zero_grad() output = model(data) loss_value = loss(output, label) loss_value.backward() optimizer.step() # loss_meter.add(loss_value.data[0]) for data, label in val_dataloader: cnt += 1 data.to(device) label.to(device) output = model(data) loss_value = loss(output, label) total_loss += loss_value.item() pred = torch.max(output, 1)[1] total_true += torch.sum(pred == label) img_total += len(label) loss_mean = float(total_loss) / float(cnt) accuracy = float(total_true) / float(img_total) print('loss_mean:{:.4f}, accuracy:{:.2f}'.format(loss_mean, accuracy)) tbwrite.add_scalar('loss_mean', loss_mean, epoch) tbwrite.add_scalar('accuracy', accuracy, epoch) # if loss_meter.value()[0] > previous_loss: # lr = lr * opt.lr_decay # for param_group in optimizer.param_groups: # param_group['lr'] = lr # previous_loss = loss_meter.value()[0] if(epoch + 1) % opt.num_epochs == 0: state = { 'model': model.state_dict() } checkpoint_path = os.path.join(opt.checkpoint_root, 'checkpoint_{}.pkl'.format(epoch + 1)) torch.save(state, checkpoint_path) if __name__ == '__main__': fire.Fire() train()
test:测试
from model import AlexNet from data.dataset import DogCat from config import DefaultConfig from torch.utils.data.dataloader import DataLoader import torch import os opt = DefaultConfig() device = 'cuda' if torch.cuda.is_available() else 'cpu' if __name__ == '__main__': model = AlexNet() model.eval() checkpoint = torch.load(os.path.join(opt.checkpoint_root, 'checkpoint_1.pkl')) model.load_state_dict(checkpoint['model']) model.to(device) test_data = DogCat(root = opt.test_data_root, train = False, test = True) for i in range(len(test_data)): data, label = test_data[i] data = data.reshape([-1, 3, 224, 224]) data.to(device) output = model(data) pred = torch.max(output, 1)[1] print(pred.item())
自己选择的路,跪着也要走完。朋友们,虽然这个世界日益浮躁起来,只要能够为了当时纯粹的梦想和感动坚持努力下去,不管其它人怎么样,我们也能够保持自己的本色走下去。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号