

多线程
1、基本概念:程序、进程、线程
程序(program):是为完成特定任务、用某种语言编写的一组指令的集合。即指一段静态的代码,静态对象。
进程(process):是程序的一次执行过程,或是正在运行的一个程序。是一个动态的过程:有它自身的产生、存在和消亡的过程。------生命周期
如:运行中的QQ,运行中的MP3播放器
程序是静态的,进程是动态的.
进程作为资源分配的单位,系统在运行时会为每个进程分配不同的内存区域.(进程和进程之间的内存是独立的)
线程(thread):进程可进一步细化为线程,是一个程序内部的一条执行路径。若一个进程同一时间并行执行多个线程,就是支持多线程的。
线程作为调度和执行的单位,每个线程拥有独立的运行栈和程序计数器(pc),线程切换的开销小.
一个进程中的多个线程共享相同的内存单元/内存地址空间→它们从同一堆中分配对象,可以访问相同的变量和对象。这就使得线程间通信更简便、高效。但多个线程操作共享的系统资源可能就会带来安全的隐患。
单核CPU和多核CPU的理解
-
单核CPU,其实是一种假的多线程,因为在一个时间单元内,也只能执行一个线程的任务。例如:虽然有多车道,但是收费站只有一个工作人员在收费,只有收了费才能通过,那么CPU就好比收费人员。如果有某个人不想交钱,那么收费人员可以把他“挂起”(晾着他,等他想通了,准备好了钱,再去收费)。但是因为CPU时间单元特别短,因此感觉不出来。
-
如果是多核的话,才能更好的发挥多线程的效率。(现在的服务器都是多核的)
-
一个Java应用程序java.exe,其实至少有三个线程:main()主线程,gc() 垃圾回收线程,异常处理线程。当然如果发生异常,会影响主线程。
并行与并发
-
并行:多个CPU同时执行多个任务。比如:多个人同时做不同的事。
-
并发:一个CPU(采用时间片)同时执行多个任务。比如:秒杀、多个人做同一件事。
使用线程的优点
背景:以单核CPU为例,只使用单个线程先后完成多个任务(调用多个方法),肯定比用多个线程来完成用的时间更短,为何仍需多线程呢?
多线程程序的优点:
-
提高应用程序的响应。对图形化界面更有意义,可增强用户体验。
-
提高计算机系统CPU的利用率。
-
改善程序结构。将既长又复杂的进程分为多个线程,独立运行,利于理解和修改。
多线程有什么作用
多线程不是为了提高执行速度,而是提高应用程序的使用率。线程和线程共享“堆内存和方法区内存”,栈内存是独立的,一个线程一个栈。可以给现实世界中的人类一种错觉: 感觉多个线程在同时并发执行。
何时需要多线程
-
程序需要同时执行两个或多个任务。
-
程序需要实现一些需要等待的任务时,操作、网络操作、搜索等。
-
需要一些后台运行的程序时。
2、多线程的创建方式----->四种方式
第一种、继承于Thread类
-
创建一个继承于Thread类的子类
-
重写Thread类的run() →将此线程执行的操作声明在run()中
-
(在测试类)创建Thread类的子类的对象
-
通过此对象调用start() →start()方法的两个作用:①启动当前线程、②调用当前线程的run()
注意点:①要想创建多个线程,就去new多个线程对象;
②要想启动这个线程,只能启动start(),不能直接去调用run()
第二种、实现Runnable接口
-
创建一个实现Runnable接口的类
2)实现类去实现Runnable中的抽象方法:run()
-
创建实现类的对象
-
将此对象作为参数传递到Thread类的构造器中,创建Thread类的对象
-
通过Thread类的对象调用start():①启动线程、②调用当前线程的run()--->调用了Runnable类型的target的run()
比较以上两种创建线程的方式:
开发中,优先选择→实现Runnable接口的方式
原因:①实现的方式没有类的单继承性的局限性
②实现的方式更适合来处理多个线程有共有数据的情况。
联系:public class Thread implements Runnable
相同点:两种方式都需要重写run(),将线程要执行的操作声明在run()中。
目前两种方式,要想启动线程,都是调用的Thread类中的start()。
第三种、实现Callable接口 ---->JDK5.0新增
-
创建一个实现Callable的实现类
-
实现call()方法,将此线程需要执行的操作声明在call()中
-
创建Callable接口实现类的对象
-
将此Callable接口实现类的对象作为参数传递到FutureTask构造器中,创建FutureTask的对象
-
将FutureTask的对象作为参数传递到Thread类的构造器中 ,创建Thread对象,并调用start()方法
-
.获取Callable中call方法的返回值
【补充】如何理解实现Callable接口的方式创建多线程比实现Runnable接口创建多线程方式强大?
-
call()可以有返回值的。
-
call()可以抛出异常,被外面的操作捕获,获取异常的信息
-
Callable是支持泛型的
第四种、使用线程池 ---->JDK5.0新增
-
提供指定线程数量的线程池
-
执行指定的线程的操作。需要提供实现Runnable接口或Callable接口实现类的对象
-
关闭连接池。
使用线程池创建多线程的好处:
1、提高响应速度(减少了创建新线程的时间)
2、降低资源消耗(重复利用线程池中的线程,不需要每次都创建)
3、便于线程管理:
corePoolSize:核心池的大小
maximumPoolSize:最大线程数
KeepAliveTime:线程没有任务时最多保持多长时间后会终止
Thread类的常用方法
1、start():启动当前线程;调用当前线程的run()
2、run():线程在被调度时执行的操作。通常需要重写Thread类中的此方法,将创建的线程要执行的操作声明在此方法中
3、getName():获取当前线程的名称
4、setName(String name):设置当前线程的名称
5、static Thread currentThread():返回当前线程。在Thread子类中就是this,通常用于主线程和Runnable实现类
6、yield():线程让步。释放当前CPU的执行权
7、join():在线程A中调用线程B的join(),此时线程A就进入阻塞状态,直到线程B完全执行完以后,线程A才结束阻塞状态(低优先级的线程也可以获得执行)
8、sleep(long millitime):(指定时间:毫秒),令当前活动线程在指定时间段内放弃对CPU控制,使其他线程有机会被执行,时间到后重排队
9、stop():已过时。当执行此方法时,强制结束当前线程
10、isAlive():返回boolean,判断线程是否还活着
修改线程名字的两种方式
-
通过setName()方法,传值修改;
-
通过构造方法传参的方式。
线程的优先级
-
线程的优先级分为:MAX_PRIORITY:10
MIN _PRIORITY:1
NORM_PRIORITY:5 --->默认优先级
-
如何获取和设置当前线程的优先级:getPriority():获取线程的优先级
setPriority(int p):设置线程的优先级
说明:高优先级的线程要抢占低优先级线程cpu的执行权。但是只是从概率上讲,高优先级的线程高概率的情况下被执行。并不意味着只有当高优先级的线程执行完以后,低优先级的线程才执行。
线程的分类
Java中的线程分为两类:一种是守护线程、一种是用户线程。
-
它们在几乎每个方面都是相同的,唯一的区别是判断 JVM何时离开。
-
守护线程是用来服务用户线程的,通过在start()方法前调用thread.setDaemon(true)可以把一个用户线程变成一个守护线程。
-
Java垃圾回收就是一个典型的守护线程。
-
若 JVM中都是守护线程,当前 JVM将退出。
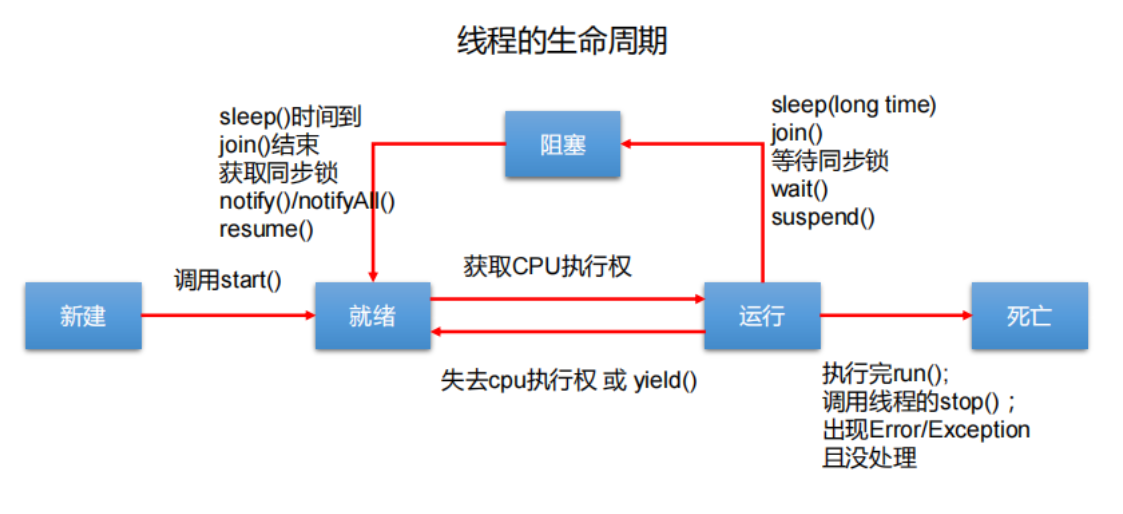
3、线程的生命周期
-
线程的生命周期一共分为五个状态:新建、就绪、运行、阻塞、消亡。
-
原理(非常重要): 线程新建之后调用start()方法进入就绪状态,在就绪状态的线程表示有权利去获取CPU的时间片。当在就绪状态中的线程抢到CPU时间片后通过调用run()方法执行程序(这个时候就代表进入了运行状态),当抢夺到的CPU时间片用完后再次进入到就绪状态,重新等待抢夺CPU时间片。当抢到CPU时间片后再次进入运行状态通过run()方法继续执行未完成的程序,如果线程中途遇到阻塞事件(如等待键盘的输入等)则线程就进入到阻塞状态,当阻塞解除后,线程再次回到就绪状态以等待抢夺CPU时间片,如此循环,直到该线程抢到的时间片够把整个程序运行完,然后run()方法结束,该线程就会进入消亡状态。
-
线程的生命周期图:
-
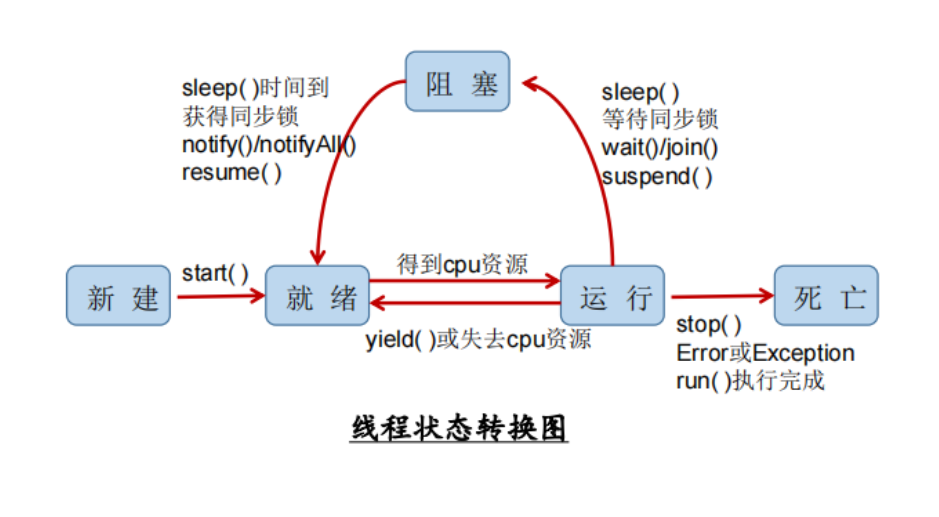
线程的状态转换图:
![]()
4、线程的安全问题
1、在Java中,我们通过同步机制,来解决线程的安全问题。
方式一:同步代码块
synchronized(同步监视器){
//需要被同步的代码
}
说明:①操作共享数据的代码,即为需要被同步的代码。--->不能包含代码多了,也不能包含代码少了
②共享数据:多个线程共同操作的变量。比如:ticket就是共享数据。
③同步监视器,俗称:锁。任何一个类的对象,都可以充当锁。 要求:多个线程必须要共用同一把锁。
补充:在实现Runnable接口创建多线程的方式中,我们可以考虑使用this
在继承Thread类创建多线程的方式中,慎用this充当同步监听器,可以考虑使用当前类充当监听器。
方式二:同步方法,在方法上加锁synchronized
关于同步方法的总结:
1、同步方法仍然涉及到同步监视器,只是不需要我们显示的声明。
2、非静态的同步方法,同步监视器是:this
静态的同步方法,同步监视器是:当前类本身
2、同步的方式,解决了线程的安全问题。----->好处 操作同步代码时,只能有一个线程参与,其他线程等待。相当于是一个单线程的过程,效率低。---->局限性
方式三:lock锁---->JDK5.0新增
lock需要手动的启动同步(lock()),同时结束同步也需要手动的实现(unlock())
5、线程的死锁问题
1、死锁的理解:不同的线程分别占用对方需要的同步资源不放弃,都在等待对方放弃自己需要的同步资源,就形成了线程的死锁。
2、说明:
1).出现死锁后,不会出现异常,不会出现提示,只是所有的线程都处于阻塞状态,无法继续。
2).我们使用同步时,要避免出现死锁。
3、 解决办法
-
专门的算法、原则
-
尽量减少同步资源的定义
-
尽量避免嵌套同步
6、线程的通信
涉及到三个方法:
wait():一旦执行此方法,当前线程就进入阻塞状态,并释放同步监视器。
notify():一旦执行此方法,就会唤醒被wait的一个线程。如果有多个线程被wait,就唤醒优先级高的那个。
notifyAll():一旦执行此方法,就会所有被wait的线程。
说明:
1、wait()、notify()、notifyAll(),三个方法必须使用在同步代码块或同步方法中。
2、wait()、notify()、notifyAll(),三个方法的调用者必须是同步代码块或同步方法中的同步监视器。
否则,会出现IllegalMonitorStateException异常。
3、wait()、notify()、notifyAll(),三个方法是定义在java.lang.Object类中。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号