基本路径寻找及航点应用
(概念简单,代码可自行脑补)
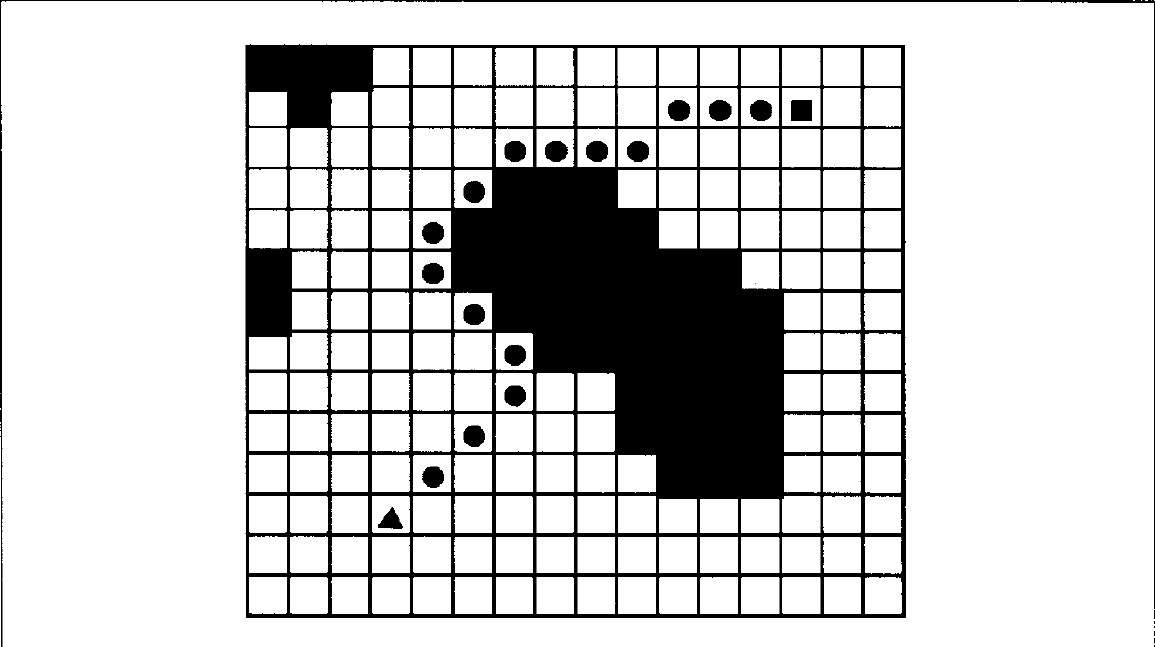
1.绕行障碍物
建立追踪者与目标之间的直线,然后前进,碰到障碍物时,控制的角色会一直保持在绕行状态,直到与该直线相交,相交时会继续沿着直线前行,直到抓到为止。
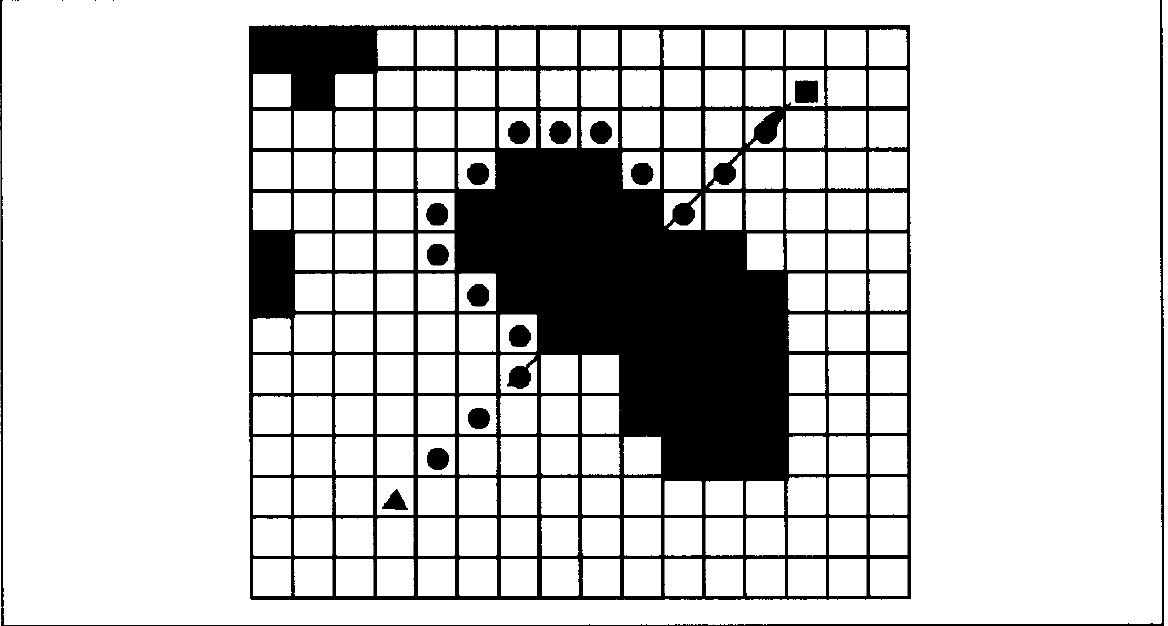
我们可以加以改良,当目标进入视野后,采用直线追踪,如下图所示。
2.贴墙式遍历地图
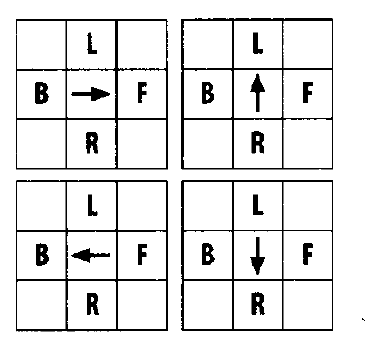
我们以左贴墙为例,给左方向分配最高的权重,其次是前、右、后,这些方向都是相对方向,先向左运动,有障碍则换前,再不行就换右、后,边走边检测,如果可以左行则又换成左,循环下去。。。
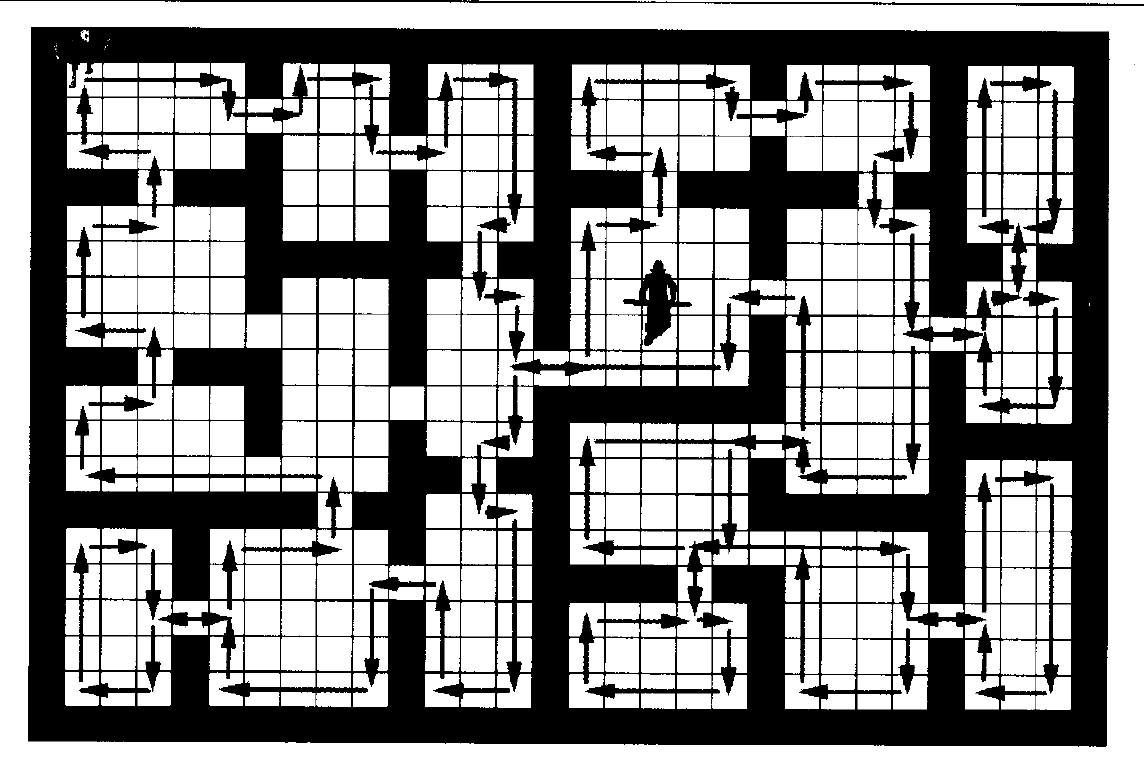
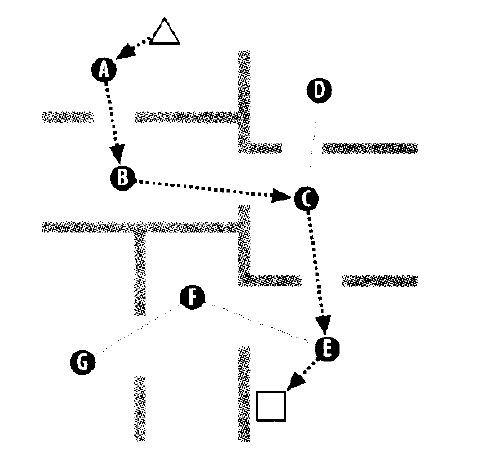
3.航点导航
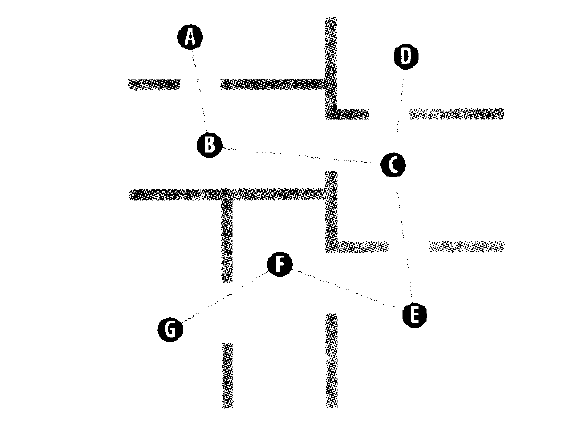
放置了七个点,由于墙的遮挡不能两两相见,但可以借助其它的点连成路线。
构建节点表
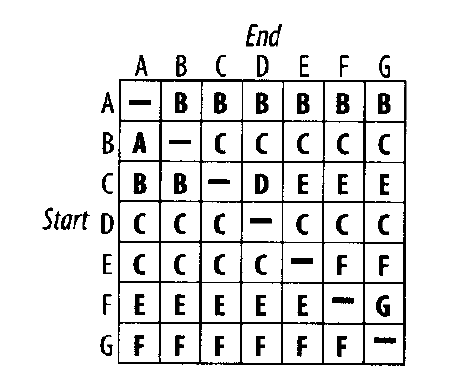
方块里的字母均为,起始点到达终点必须踏出的第一步,利用这种手牵手的方式,可以很快找出路线(例如A到F为ABCEF,中途重复抛弃)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号