
工业机器人
配置备用按键的操作步骤
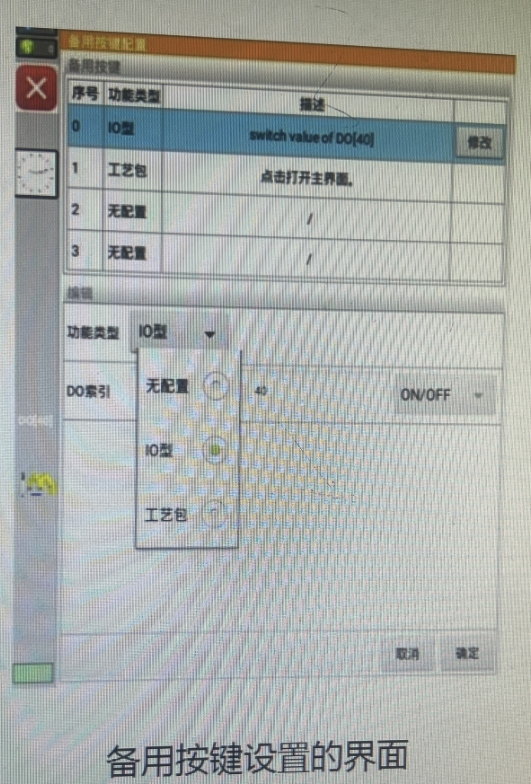
- 在super用户权限下,在主菜单里选择配置——示教器配置——备用按键设置选项,进入备用按键选项界面
- 选择其中的序号,点击对应的修改按钮;
- 点击选择“功能类型”下拉框选项,选择IO型;
- 在“DO索引”输入框中输入DO【12】;
- 下拉后面的选项框选择为“ON/OFF”
- 点击“确认”按钮后,这样就完成配置。
![image]()
标定工件坐标系
操作步骤 - 在菜单中选择投入运行——测量——用户工件标定
- 选择待标定的用户工件号,可设置用户工件名称
- 点击【开始标定】按钮
- 移动到基坐标原点,点击【原点】,获取坐标记录原点坐标
- 移动到标定基坐标的X方向的某点,点击【X方向】,获取坐标记录坐标
- 移动到标定基坐标的Y方向的某点,点击【Y方向】,获取坐标记录坐标
- 点击【标定】按钮,确认程序计算出标定坐标系
- 点击【保存】按钮,存储基坐标的标定值
- 切换到用户坐标系,选择标定的工件号,走XYZ方向,则会按标定的方向运动
运动参数的用法结合关节指令程序示列
![image]()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号