
电机PID的7种控制模式的PID参数组合、算法选择及应用场景详解
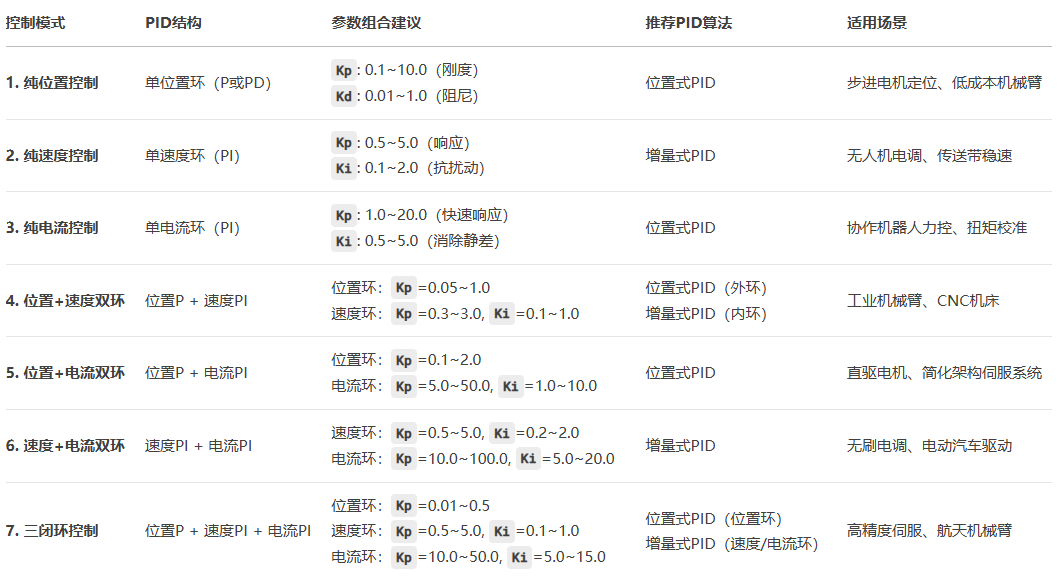
1、电机PID的7种控制模式的PID参数组合与算法选择
以下是每种控制模式的PID参数设计逻辑、推荐算法(位置式/增量式)及典型参数范围:
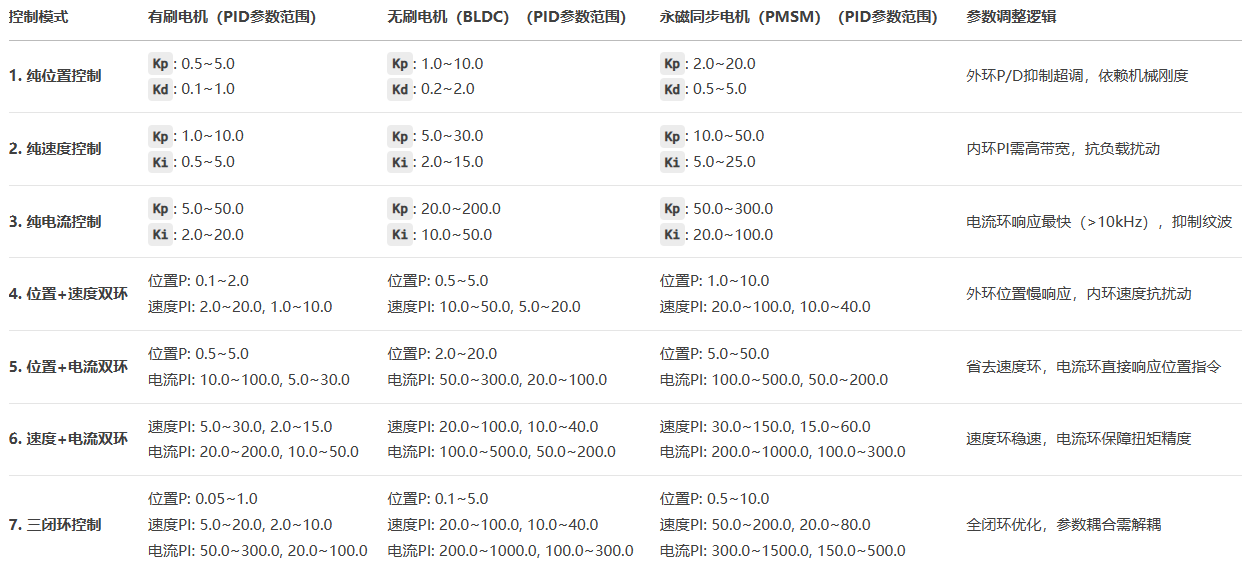
(1)有刷、无刷、永磁同步三种电机的PID调试方法
调参方法:
试凑法:先调P,再调I,最后调D,观察系统响应10。
临界比例法:使系统振荡后计算PID参数6。
一般调节法:逐步调整P、I、D,避免振荡10。
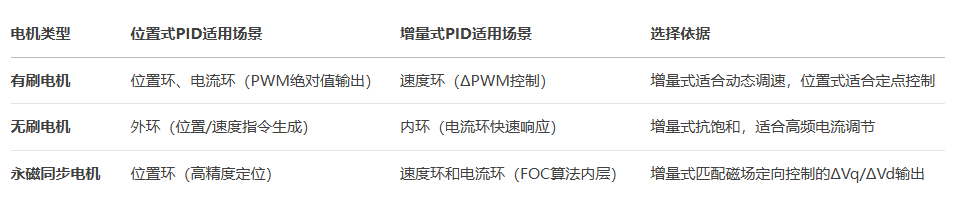
(2)位置式PID与增量式PID的选用规则
(3)PID计算出的控制量

关键点:
所有模式最终均需转换为 PWM或SVPWM 驱动电机。
PMSM通常采用 FOC(磁场定向控制),输出 Vq/Vd 再转换为SVPWM。
(4)几种控制模式以及电机类型对应的应用场景

趋势:
有刷电机:低成本、低动态场景(如玩具、家电)。
无刷电机:中高动态需求(如无人机、电动汽车)。
PMSM:高精度、高响应场合(如伺服系统、航天设备)。
2、位置式PID与增量式PID的选用原则
(1)位置式PID
特点:输出绝对值,积分项需防饱和。
适用场景:
需要精确绝对控制(如位置环、PWM输出)。
执行器为模拟量(如伺服阀、直流电机)。
(2)增量式PID
特点:输出变化量,天然抗饱和,适合脉冲驱动。
适用场景:
执行器为增量型(如步进电机脉冲控制)。
低资源MCU(如STM32F103)。
通用规则:
外环(位置/速度):优先位置式PID(需绝对输出)。
内环(速度/电流):增量式PID(快速响应,抗饱和)。
3、7种控制模式的应用场景详解
(1)纯位置控制
场景:3D打印机Z轴、低成本机械臂(开环步进电机)。
特点:无速度/电流反馈,依赖机械刚度。
(2)纯速度控制
场景:无人机旋翼、风扇调速。
特点:忽略位置,仅维持转速稳定。
(3)纯电流控制
场景:协作机器人力控模式、电机扭矩标定。
(4)位置+速度双环
场景:工业机械臂(发那科)、数控机床。
特点:位置环提供目标,速度环抗负载扰动。
(5)位置+电流双环
场景:直驱力矩电机、简化伺服系统。
特点:省去速度环,依赖电流环快速响应。
(6)速度+电流双环
场景:BLDC电调(如BLHeli)、电动车驱动。
特点:速度环稳速,电流环保障扭矩精度。
(7)三闭环控制
场景:光刻机运动台、高动态机械臂。
特点:全闭环优化,参数整定复杂。
4、PID参数整定步骤(以三闭环为例)
(1)电流环优先(最快环路):
设Ki_cur=0,调Kp_cur至临界振荡,然后降低30%。
加入Ki_cur消除静差(通常Ki_cur ≈ 0.1~0.3 Kp_cur)。
(2)速度环次之:
带宽设为电流环的1/5~1/10。
Kp_vel由动态响应决定,Ki_vel抗负载突变。
(3)位置环最后:
Kp_pos决定刚度,Kd_pos抑制超调(若用PD)。
5、典型问题解答
Q:何时用PD而非PID?
A:位置环常用PD(I易导致超调),速度/电流环需I消除静差。
Q:增量式PID能否用于位置环?
A:可以,但需外部累加输出(如position += Δu),适合步进电机。
6、总结
模式选择:根据动态需求从单环到三闭环递进。
PID算法:位置式用于绝对控制,增量式用于脉冲驱动。
参数整定:内环→外环,先比例后积分,微分最后加。
通过合理匹配控制模式、PID算法和参数,可覆盖从消费级到工业级的所有电机控制需求。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号