
电机的三个核心
在电机控制中,速度、位置、转矩是三个核心物理量,它们共同决定了电机的运行状态和性能。以下是它们的详细解释及相互关系:
1、速度(Speed)
定义:指电机转子的旋转快慢,单位通常为 RPM(转/分钟) 或 rad/s(弧度/秒)。
公式:

作用:
决定电机的运动效率(如电动车车速、风扇风量)。
在闭环控制中,通过编码器或霍尔传感器反馈实时调节。
示例:
电动车电机:3000 RPM ≈ 50转/秒;
工业伺服电机:额定转速可能为2000 RPM。
2、位置(Position)
定义:指电机转子的角度或线性位移,单位可以是 度(°)、弧度(rad) 或 脉冲数(如编码器计数)。
多圈 vs. 单圈:
单圈位置:0°~360°(如舵机);
多圈位置:通过绝对式编码器记录(如机械臂关节)。
作用:
精准控制机械运动(如机器人抓取、CNC机床加工)。
依赖高分辨率传感器(如17位绝对式编码器,分辨率达360°/131072≈0.0027°)。
示例:
伺服电机控制机械臂旋转90°;
3D打印机步进电机移动喷嘴到指定坐标。
3、转矩(Torque)
定义:指电机输出的旋转力矩,单位通常为 N·m(牛·米) 或 oz·in(盎司·英寸)。
物理意义:转矩是电机驱动负载的能力,类似“拧螺丝的力度”。
公式:转矩(T)=力(F)×力臂长度(r)
作用:
决定电机的负载能力(如电动车爬坡、机械臂举重)。
在电流控制中,转矩与电流成正比(永磁电机:T=Kt*Iq,Kt为转矩常数)。
示例:
电动车电机:额定转矩50 N·m(影响加速和爬坡能力);
工业拧螺丝机:需精确控制转矩防止过紧。
4、三者的关系
(1) 动态关系
转矩 → 速度:转矩克服负载和摩擦,产生加速度(α=T/J,J为转动惯量)。
速度 → 位置:位置是速度的积分(θ=∫ωdt)。
(2) 控制中的优先级
转矩控制:优先保证力矩(如机器人抓取易碎品);
速度控制:优先稳定转速(如风机);
位置控制:优先精准定位(如数控机床)。
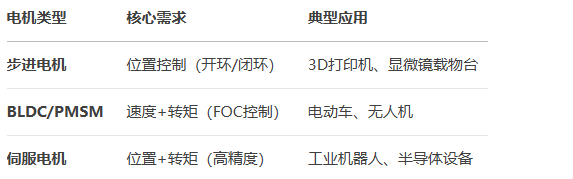
5、不同电机对三者的需求
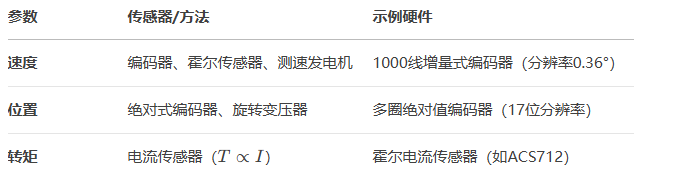
6、如何测量这些参数?
7、实际应用中的协调控制
电动车加速:
控制器增大电流(↑转矩)→ 电机加速(↑速度)→ 车辆位置移动。
达到目标速度后,减小电流维持匀速。
机械臂抓取:
位置环控制移动到目标点;
转矩环限制抓取力度,防止捏碎物体。
8、总结
速度:电机转得多快;
位置:电机转到哪里;
转矩:电机转得多“有力”。
三者通过PID闭环控制协同工作,具体优先级取决于应用场景(如速度优先的风机 vs. 位置优先的机床)。理解它们的定义和关系,是设计高效电机控制系统的基础!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号