STM32Cube:HAL库定时器中断返回进入HardFault_Handler
关键点:
HAL库定时器开启中断后,会马上进入中断!!!!!!!!!!!!!!!
一、情景描述
初始化了两个定时器TIM1和TIM4,TIM1用来实现每10ms进入一次中断,TIM4用来生成PWM波。但是一旦进入
一次TIM1更新中断并在中断中修改TIM4的PWM占空比__HAL_TIM_SET_COMPARE()就不会再进入TIM1更新中断,并且会进入HardFault_Handler()。
二、问题分析
我尝试把定时器更新回调函数中的内容注释掉,发现代码又可以正常运行。
因为刚学STM32,所以不太熟悉,我以为是不能再回调函数中修改比较值,但是我在Debug的时候,发现单片机进入HardFault_Handler并不是在调用__HAL_TIM_SET_COMPARE()后,而是在整个回调函数之后,所以就不是调用__HAL_TIM_SET_COMPARE()的问题。
三、问题解决
想到硬件错误,我就想到初始化顺序出错,从顺序出错我又想到了
开启定时器中断的时候会马上进入一次更新中断!!!!!!!!!
回到代码,果然,他在MX_TIM2_Init();中就把定时器中断打开,导致TIM4还没初始化完成就进入中断修改TIM4的比较值,所以导致出现HardFault_Handler。
3.2 错误的tim.c代码
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 71;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/************************
罪魁祸首
罪魁祸首
罪魁祸首
罪魁祸首
罪魁祸首
罪魁祸首
罪魁祸首
罪魁祸首
***********************/
HAL_TIM_Base_Start_IT(&htim1);
/* USER CODE END TIM1_Init 2 */
}
/* TIM4 init function */
void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 719;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 999;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
/* USER CODE END TIM4_Init 2 */
HAL_TIM_MspPostInit(&htim4);
}
3.2 main函数初始化
MX_TIM2_Init();
/*由于在MX_TIM2_Init();开启定时器中断,
导致TIM4还没初始化完成就修改与TIM4相关的寄存器,
从而进入HardFault!!!!!!!*/
MX_TIM4_Init();
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1);
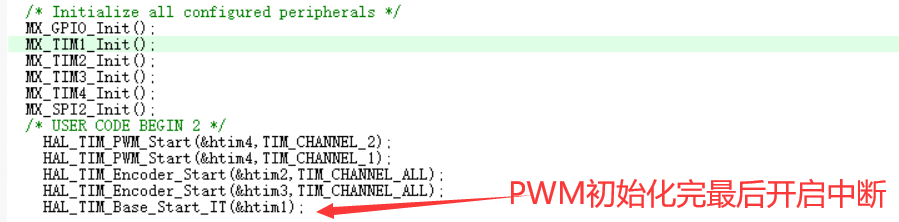
3.3 正确的初始化流程
注释掉
MX_TIM1_Init()中的HAL_TIM_Base_Start_IT(&htim1);,将它放在相关初始化完成之后,如下图所示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号