STM32之I2C通信
I2C通信
学习资料:
前言
线与:连接在总线上的设备只要有一个输出低电平(0)总线就为低电平(0),只有全部设备都为高阻态时总线才是高电平(1)
I2C简介
I2C(Inter IC Bus)是由Philips公司开发的一种通用数据总线
- 两根通信线:SCL(Serial Clock)、SDA(Serial Data)
- 同步,半双工
- 带数据应答
- 支持总线挂载多设备(一主多从、多主多从(可利用“线与”特性来执行时钟同步和总线仲裁))
I2C的硬件电路设计
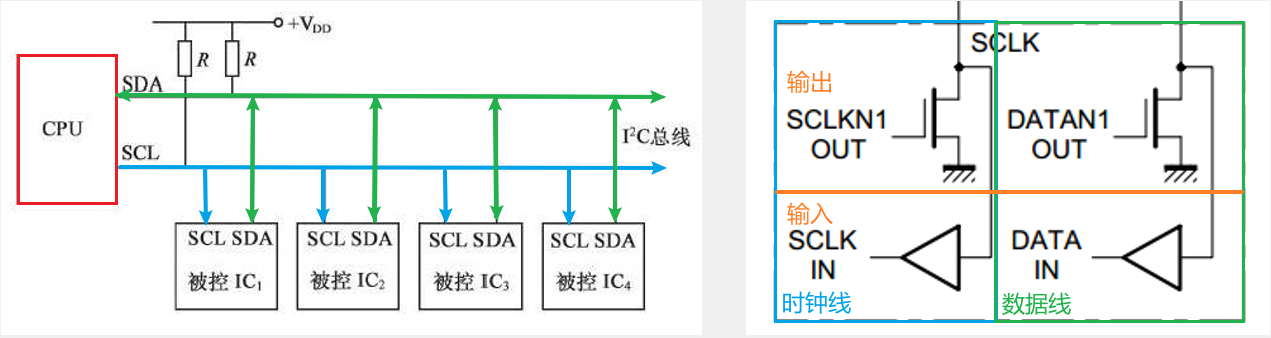
所有I2C设备的SCL连在一起,SDA连在一起
设备的SCL和SDA均要配置成开漏输出模式
SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
我主要学习的是I2C一主多从的模式,所以下面以一主多从的模式(一主 即 MCU(STM32)来当作主机 ,其它设备当作从机)来讲解I2C的硬件电路是如何设计出来的
解释:
-
对于 SCL 时钟线 来说 它是由主机控制的 所以它可以是 开漏输出 亦可以是 推挽输出 都可以 ,但为什么选择了 开漏输出模式 是因为 :多主多从模式下可利用“线与”特性来执行 时钟同步和总线仲裁
-
对于 SDA 时钟线 来说 它是通信数据的线 不仅主机需要它进行 输出数据 还需要 接收从机发送过来的 数据 ,即在在此期间需要频繁的切换GPIO的输入输出模式 还要兼顾 不能在一个设备输出高电平 另一个设备输出低电平 导致的电源短路现象 所以为了防止总线没有协调好而导致此现象的产生 I2C设计是禁止所有设备输出强上拉的高电平 采用 外置弱上拉电阻加开漏输出模式
-
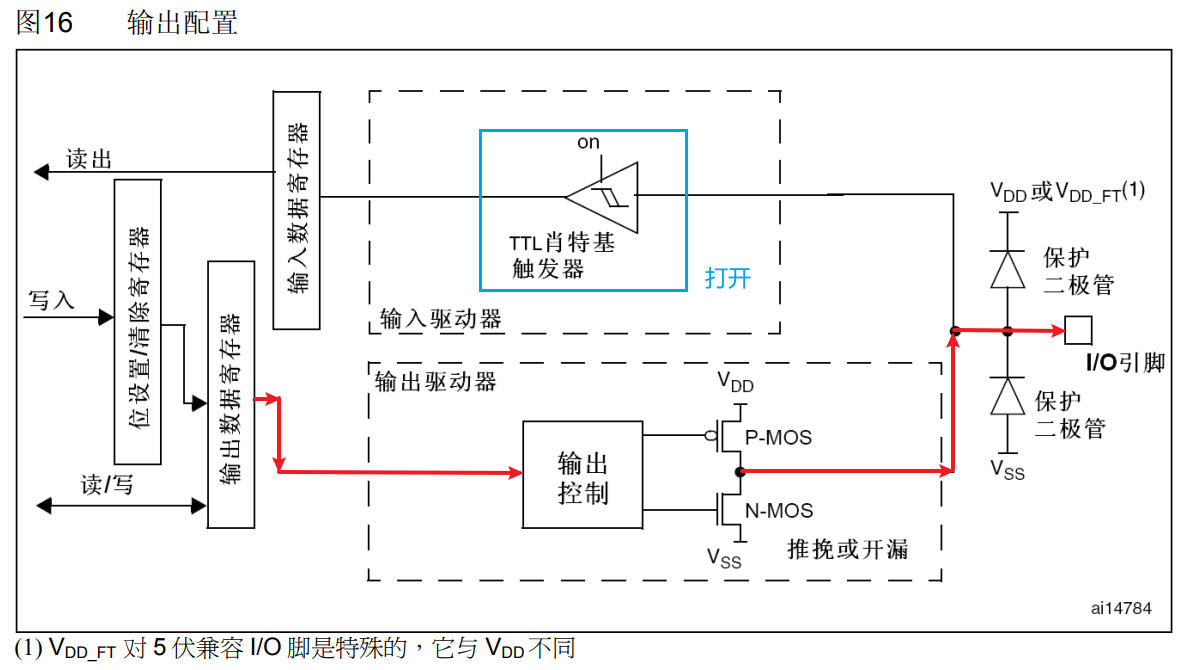
那此时 你可能有所疑惑: 选择开漏输出模式 那岂不是不能输入了 其实然也 不知道你是否还记得 学习GPIO时,我们的STM32输出配置框图中 无论我们选择什么输出模式 都是可以进行输入的 不信?请看下图
STM32数据手册上写到 当I/O端口被配置为输出时
-
施密特触发输入被激活
-
在每个APB2时钟周期,出现在I/O脚上的数据被采样到输入数据寄存器
-
开漏模式时,读输入数据寄存器时可得到I/O口状态 -- 我们软件模拟I2C时就使用到了这个特性
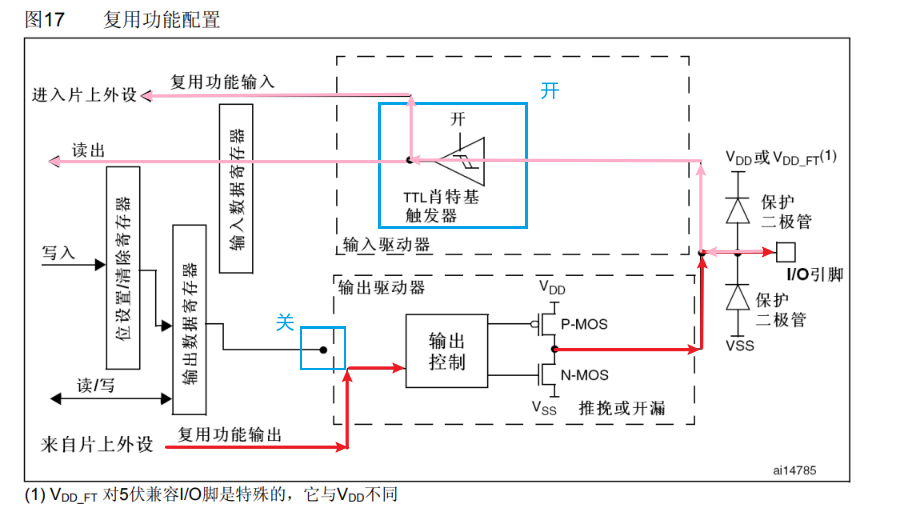
GPIO_ReadInputDataBit但是我们 硬件读写的时候使用的是复用开漏输出 复用功能输入,直接读写到我们的I2C的移位寄存器中
如果你对GPIO有所遗忘 可以去看我的另一篇关于STM32之GPIO外设 - Sakura_Ji - 博客园 的笔记
-
-
-
开漏输出模式: 设备输出1时是高阻态,在硬件电路设计图中即SCLKN1OUT/DATAN1OUT断开使引脚浮空,为了避免引脚浮空,通过外置的上拉电阻呈现弱上拉的高电平 但不影响数据的传输;设备输出0时是强下拉低电平
-
所有任何设备在任何时候 是都可以进行输入的 都可以通过一个数据缓冲器或者是施密特触发器,进行输入
通过上文可知:
- 设备在进行输出时: 低电平:强下拉的低电平 高电平: 弱上拉的高电平
- 设备在进行输入时: 可直接输出高电平(相当于高阻态 断开引脚) 然后观察总线的高低电平即可
I2C的软件设计
- 主机可以访问总线上的任何一个设备
- 要与那个设备进行通信 主机在起始条件后 需要先发送 该设备的地址
- 所有设备都会对这个地址进行判断,如果和自己的不一样会认为没有访问自己,之后的时序就不管了,如果一样会向主机发送应答,并准备响应之后主机的读写操作
- 同一条的I2C总线上的从机的设备地址要求不能相同
- 从机设备地址在I2C协议标准里分为7位地址和10位地址,7位地址应用最为广泛
- 以7位作为示例:厂商一般规定高4位是固定死的,但低3位是可以通过电路进行改变的,这样地址就可以不同,所以I2C总线可以搭载相同的设备
- 仲裁: 当有多个设备想跟主机通讯时,为防止数据冲突,会采用仲裁的方式决定由哪个设备占用总线。在通讯分点已经说明了一次通讯只能有一个主机和一个从机
I2C最大的一个特点就是有完善的应答机制,从机(主机)接收到主机(从机)的数据时,会回复一个应答信号来通知主机表示“我收到了”。
应答信号: 出现在1个字节传输完成之后,即第9个SCL时钟周期内,此时主机需要释放SDA总线,把总线控制权交给从机,由于上拉电阻的作用,此时总线为高电平,如果从机正确的收到了主机发来的数据,会把SDA拉低,表示应答响应。
非应答信号:当第9个SCL时钟周期时,SDA保持高电平,表示非应答信号。
非应答信号可能是主机产生也可能是从机产生,产生非应答信号的情况主要有以下几种:
- I2C总线上没有主机所指定地址的从机设备;
- 从机正在执行一些操作,处于忙状态,还没有准备好与主机通讯;
- 主机发送的一些控制命令,从机不支持;
- 主机接收从机数据时,主机产生非应答信号,通知从机数据传输结束,不要再发数据了;
I2C的时序机制
-
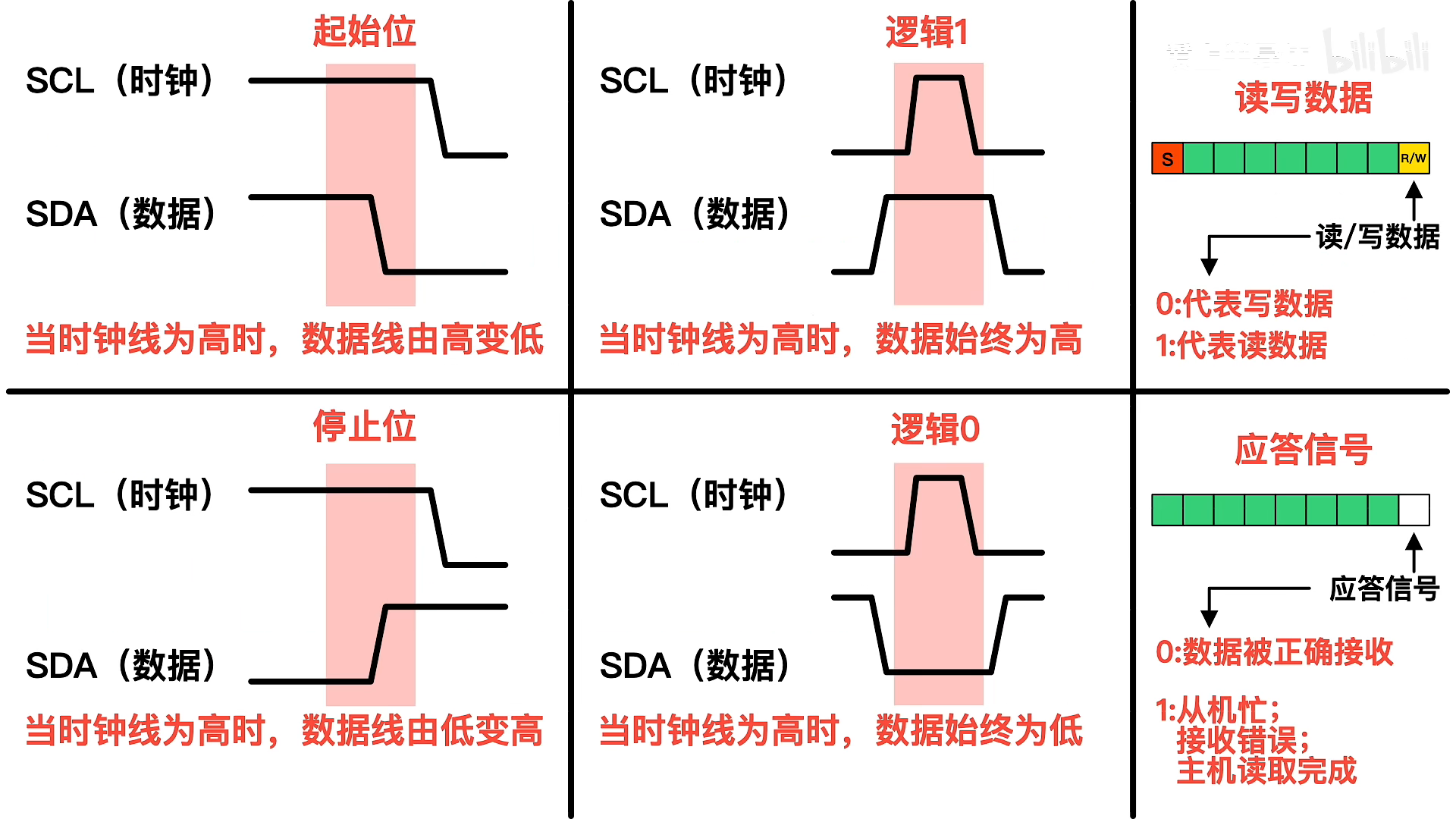
总线空闲状态: SCL和SDK同时处于高电平
-
起始条件: SCL高电平期间,SDA从 高电平 切换到 低电平
-
终止条件: SCL高电平期间,SDA从 低电平 切换到 高电平
-
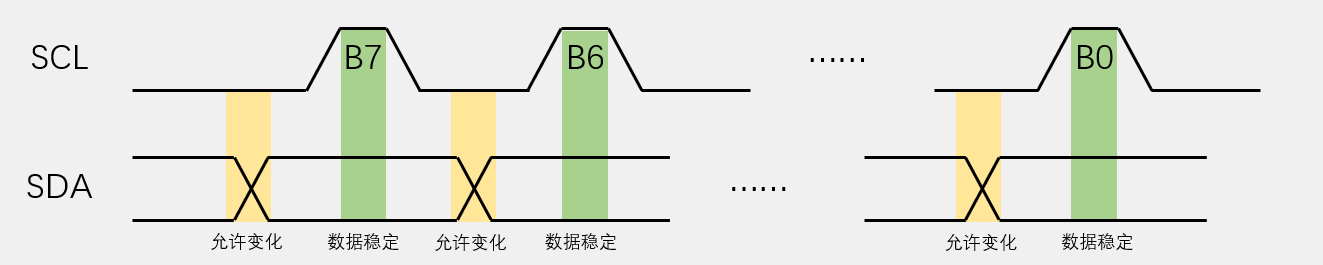
发送一个字节: SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节
-
接收一个字节: SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)
-
发送应答:主机在接收完一个字节之后,在下一个 时钟发送一位数据,数据0表示应答,数据1表示非应答
-
接收应答:主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
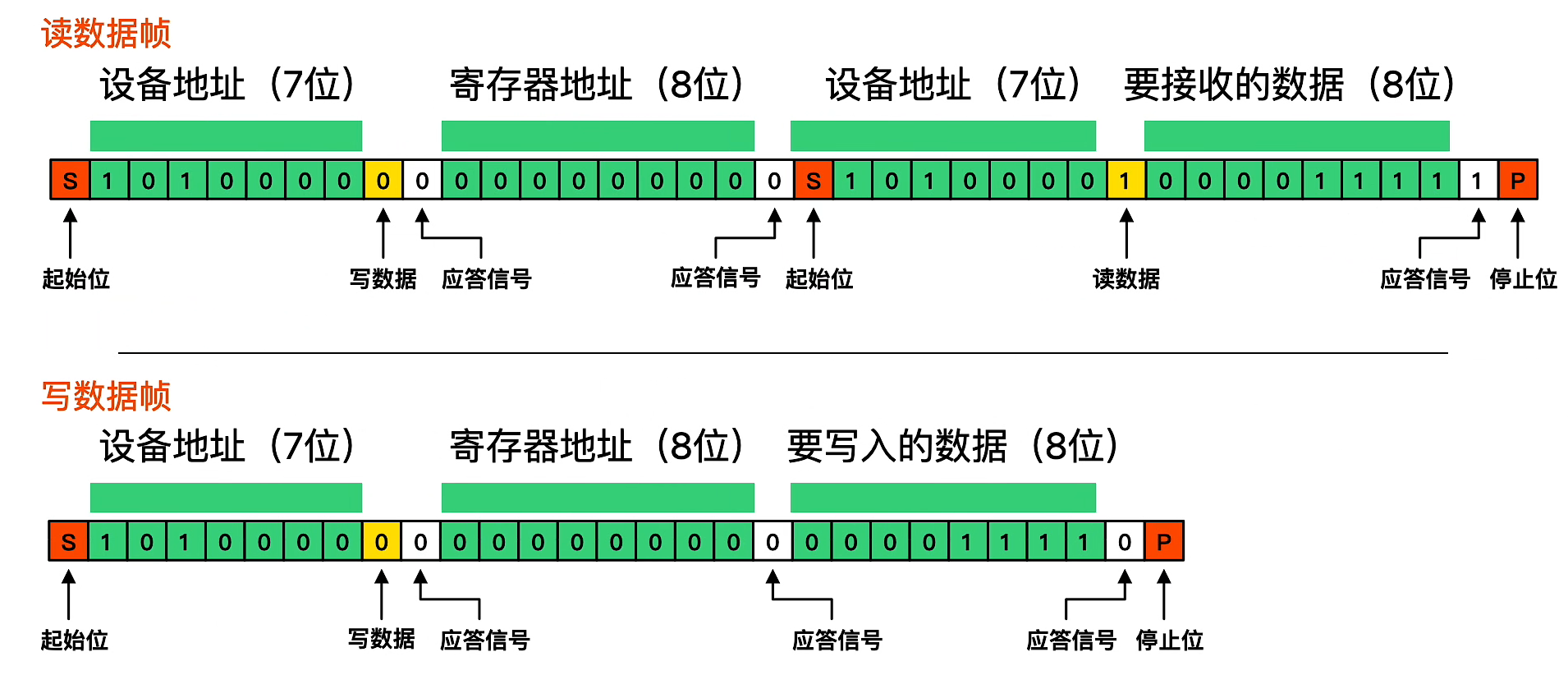
I2C的数据帧格式
I2C的数据帧格式有:指定地址写,当前地址读,指定地址读
PS:起始位和停止位 只是个状态通知 并不是1位数据 也就是设备感受到总线的变换所以不要把 它们当成 1位数据来对待 它们只是个信号通知
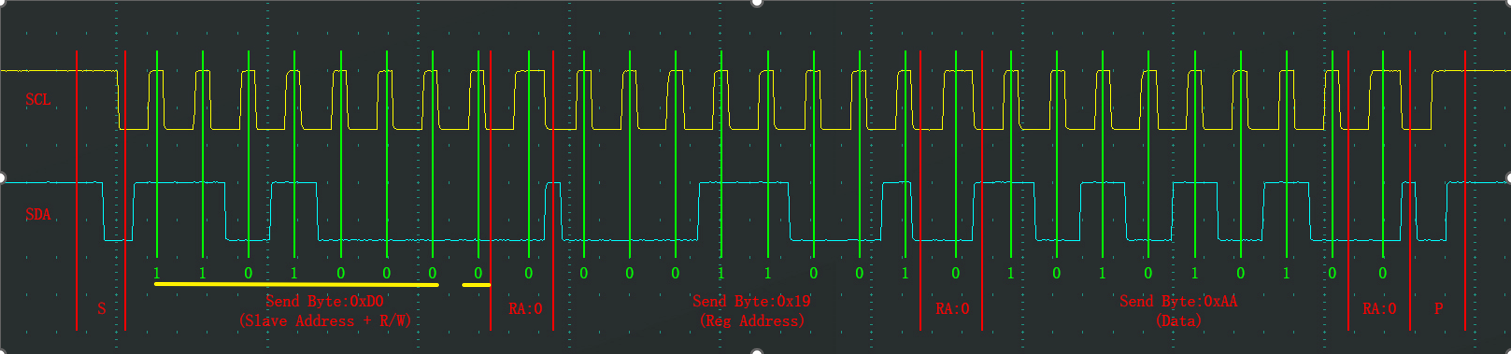
指定地址写
对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
-
总线由空闲状态转为起始位:在SCL高电平的期间,SDA下降沿触发
-
主机控制SDA 发送从机设备地址(7位地址) + 发送 读(1)/写(0)指令(1位):
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机释放SDA 主机控制SDA 发送寄存器地址(8位)
-
因为从机要在低电平尽快变化数据(释放SDA),所以SCL的下降沿和SDA的上升沿几乎是同时发生的
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机释放SDA 主机控制SDA 发送数据(8位)
-
因为从机要在低电平尽快变化数据(释放SDA),所以SCL的下降沿和SDA的上升沿几乎是同时发生的
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机释放SDA 主机控制SDA 产生停止条件
- 因为从机要在低电平尽快变化数据(释放SDA),所以SCL的下降沿和SDA的上升沿几乎是同时发生的
- 数据变化:在SCL低电平期间,SDA进行数据变化
- 如果主机想结束通讯 就可以产生停止条件 在停止条件之前 ,先拉低SDA,为后续SDA的上升沿做准备
如果主机想要继续传输 就可以继续发送数据 它的数据会自动写入下一个寄存器地址的位置(单独的记录地址的指针变量会自增 在下文当前地址读中有解释为什么)
数据稳定:在SCL高电平期间,SDA保持不动
-
在SCL高电平的期间,SDA上升沿触发 产生停止位 转向 总线空闲状态
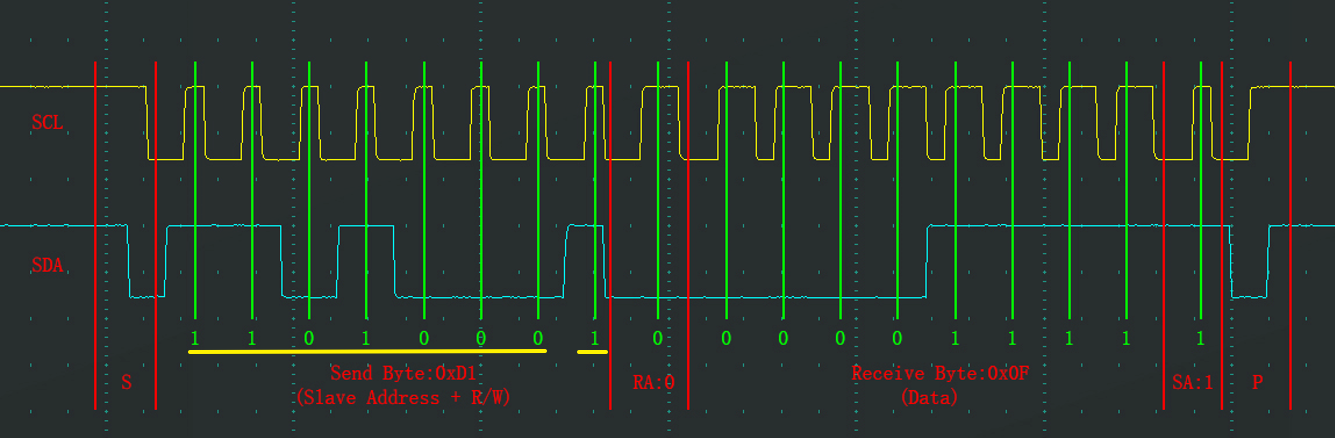
当前地址读
对于指定设备(Slave Address),在当前地址指针指示的地址下,读取从机数据(Data)
-
总线由空闲状态转为起始位:在SCL高电平的期间,SDA下降沿触发
-
主机控制SDA 发送从机设备地址(7位地址) + 发送 读(1)/写(0)指令(1位):
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机继续控制SDA 从机发送数据(8位) -- 数据传输方向 变换
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
那么问题来了 -- 此时从机是从将哪个寄存器的数据 传给主机的呢? 在I2C协议的规定中,在主机进行寻址时,一旦读写标志位给了1,下一个字节要立马转为读的时序,所以主机还来不及指定,我要读那个寄存器,就要开始接收数据了,所以这里没有指定地址这个环节,那从机该发哪一个寄存器的数据呢?
在从机中,所有的寄存器都被分配到了一个线性区域中,并且会有一个单独的记录地址的指针变量,指示着其中的一个寄存器,这个指针上电默认指向0地址,并且每写入一个字节和读出一个字节后,这个指针会自动自增一次,移动到下一个位置
那么在调用当前地址读的时序时,主机没有指定要读那个地址,从机就会返回当前 记录地址的那个指针变量的 指针指向的寄存器的值,举例:
- 上一步刚刚调用了指定地址写的时序,在0X19的位置写入了0XAA,那么 记录地址的那个指针变量 就会自动加一 移动到 0X1A的位置
- 之后再调用当前地制读的时序,读取的就是0X1A这个地址的寄存器中的值
- 再继续读数据,读取的就是0X1B这个地址的寄存器中的值
- ···
- 以此类推
-
-
从机释放SDA 接收主机的应答位 主机控制SDA 产生停止条件
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当从机释放SDA后 由于主机是非应答 所以总线依旧处于上拉状态 所以在SA(Send Ack)处显示的像未被释放过一样
- 当从机未得到主机的应答时,从机将不会再继续发送给主机数据,由主机控制SDA
- 数据变化:在SCL低电平期间,SDA进行数据变化
- 如果主机想要结束通讯 就可以产生停止条件 在停止条件之前 ,先拉低SDA,为后续SDA的上升沿做准备
如果主机想要继续读取 上面就得应答从机 然后可以继续读取下一个寄存器地址中的数据
数据稳定:在SCL高电平期间,SDA保持不动
-
在SCL高电平的期间,SDA上升沿触发 产生停止位 转向 总线空闲状态
指定地址读
对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)

-
总线由空闲状态转为起始位:在SCL高电平的期间,SDA下降沿触发
-
主机控制SDA 发送从机设备地址(7位地址) + 发送 读(1)/写(0)指令(1位):
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机释放SDA 主机控制SDA 发送寄存器地址(8位)
-
因为从机要在低电平尽快变化数据(释放SDA),所以SCL的下降沿和SDA的上升沿几乎是同时发生的
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机释放SDA 主机控制SDA 重新起始SR(Start Repeat)
- 因为从机要在低电平尽快变化数据(释放SDA),所以SCL的下降沿和SDA的上升沿几乎是同时发生的
- 数据变化:在SCL低电平期间,SDA进行数据变化
- 产生重新起始条件,从机释放SDA后,主机依旧保持SDA上拉状态,为后续SDA的下降沿做准备
- 那么问题来了 -- 重新起始是什么鬼?为什么这么操作,上文说过 有一个单独的记录地址的指针变量 我们先像那个指定的寄存器地址进行写入操作(但不真正的写入 所以指针不会自增),重新起始,然后进行当前地址读操作,这样不就完美的实现了 指定地址读操作嘛 看不懂去看当前地址读中的举例
- 重新起始相当于另起一个时序,因为读写标志位只能是跟着起始条件的第一个字节,因此想要切换读写操作,只能再启动一次时序即重新起始
- 起始位:在SCL高电平的期间,SDA下降沿触发
-
主机控制SDA 发送从机设备地址(7位地址) + 发送 读(1)/写(0)指令(1位):
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
主机释放SDA 接收从机的应答位 从机控制SDA :
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当主机释放SDA后 立刻被从机拉下并控制 所以在RA(Receive Ack)处显示的像未被释放过一样
-
主机得到从机的应答 从机继续控制SDA 从机发送数据(8位) -- 数据传输方向 变换
-
数据变化:在SCL低电平期间,SDA进行数据变化
-
数据稳定:在SCL高电平期间,SDA保持不动
-
-
从机释放SDA 接收主机的应答位 主机控制SDA 产生停止条件
- 从机回复 0是应答 1为非应答
- 由于线与机制,当从机给予应答,从总线的现象上看 当从机释放SDA后 由于主机是非应答 所以总线依旧处于上拉状态 所以在SA(Send Ack)处显示的像未被释放过一样
- 当从机未得到主机的应答时,从机将不会再继续发送给主机数据,由主机控制SDA
- 数据变化:在SCL低电平期间,SDA进行数据变化
- 如果主机想结束通讯 就可以产生停止条件 在停止条件之前 ,先拉低SDA,为后续SDA的上升沿做准备
如果主机想要继续读取 上面就得应答从机 然后可以继续读取下一个寄存器地址中的数据
数据稳定:在SCL高电平期间,SDA保持不动
-
在SCL高电平的期间,SDA上升沿触发 产生停止位 转向 总线空闲状态
STM32之I2C外设
STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
支持多主机模型
支持7位/10位地址模式
支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
支持DMA
兼容系统管理总线SMBus协议
10位地址的操作方式:起始位后 发送的第一个字节的 前5位必须是: 11110 然后是2位地址 + 读写位 第二个字节是 后8位地址 所以7位地址的前5位不能是11110
外设引脚:一般都是借用GPIO的复用模式和外界链接起来的,要想使用STM32的硬件电路,就只能使用它规定好的引脚 举例:
| I2C引脚 | I2C1 | I2C2 |
|---|---|---|
| SCL | PB6-->可以重映射到PB8 | PB10 |
| SDA | PB7-->可以重映射到PB9 | PB11 |
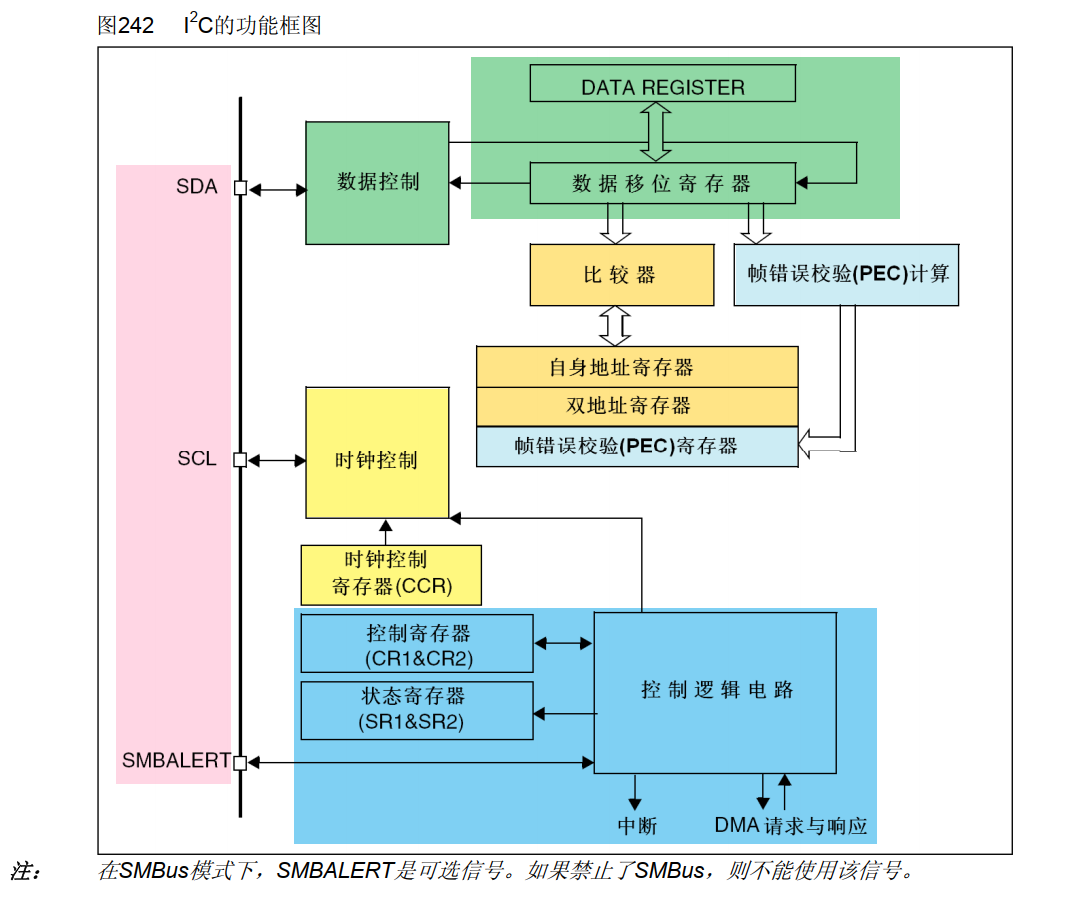
- 想要发送数据:可以把一字节的数据写到数据寄存器DR,当移位寄存器没有数据移位时(也就是空),这个数据寄存器的值就会进一步转到移位寄存器里,在上一个数据的移位过程中,我们就可以把下一个数据写到数据寄存器DR中等着了,一旦上一个数据移位成功,下一个数据就可以无缝衔接,继续发送了
- 当数据从数据寄存器 转移到 移位寄存器时,就会置状态寄存器 TXE 为1 表示发送数据寄存器为空
- 想要接收数据:输入的数据,一位一位的从引脚 移进 移位寄存器 ,当一个字节的数据接收完成,数据就整体从移位寄存器转到数据寄存器,同时置标志位RXNE为1,表示接收数据寄存器非空,这时我们就可以把数据寄存器DR里的数据都出来了
- PS:可对比串口USART那一章的的框图 -- 你就会发现串口的数据收发 也是由移位寄存器 和 数据寄存器 来实现的,只不过串口USART是全双工有两个数据和移位寄存器。而I2C是半双工只有一个数据和移位寄存器 可参考STM32之USART通信 - Sakura_Ji - 博客园
- 通过控制寄存器的对应位操作,就可以控制什么时候收发数据,对于起始条件,终止条件,和应答位的相关控制电路STM32的框图并没有详细画出,对于软件工程师的我们知道有相关电路可完成此操作就可以了
- 比较器和地址寄存器是从机模式使用的,由于STM32是基于可变多主机模型设计的,STM32不进行通信时就是从机模式,既然作为从机就要有从机地址,所以从机地址就可以由自身地址寄存器来指定,这个地址可以自定,然后写入到这个自身地址寄存器中,STM32作为从机被寻址时,可通过比较器来与自身地址寄存器进行比较,如果相同,STM32就可以响应外部主机的召唤。
- STM32可支持同时响应两个从机地址,所以就有自身地址寄存器和双地址寄存器 -- 多主机模式下的,但此次学习是以STM32做为主机,此模式 未待完续
- 帧错误校验(PEC): 当发送/接收一个多字节的数据帧时,硬件可自行执行CRC校验(是一种很常见的数据校验算法,可根据前面的数据就行各种数据的运算,然后会得到一个字节的校验位,附加到数据帧的后面),接收发送都可以启动这个CRC校验,如果数据出错,CRC校验就会通不过,就会置校验错误标置位
I2C之STM32发送流程
要学会读懂下发的序列图,要与对应相关寄存器的位进行互动学习,我已将重要的寄存器标志位放在了下方
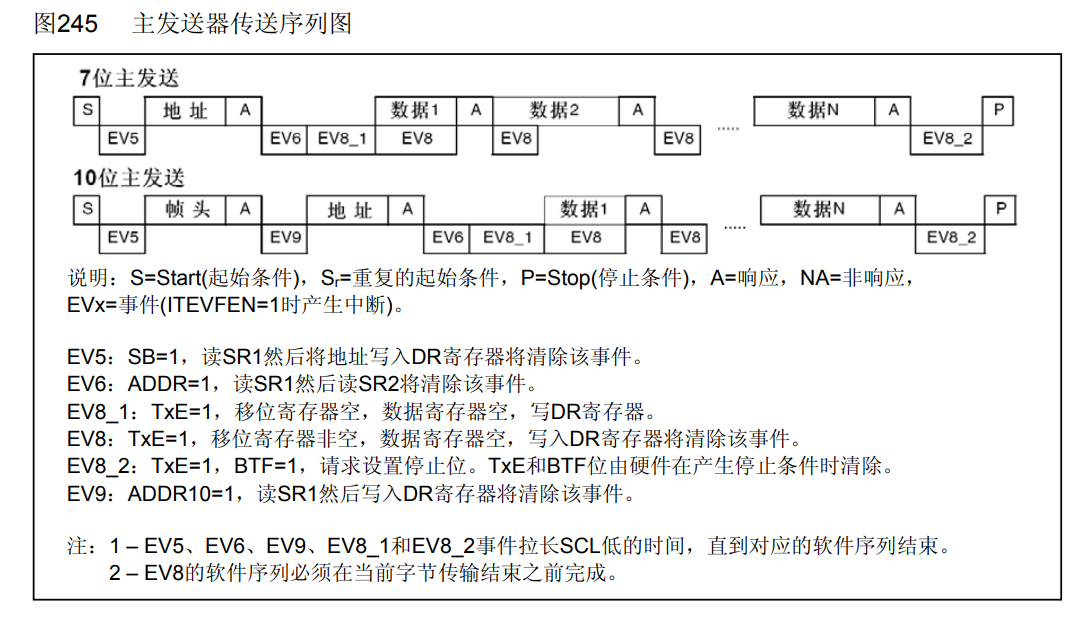
默认情况下,STM32的I2C接口总是工作在从模式。从从模式切换到主模式,需要产生一个起始条件 也就是将 I2C的控制寄存器I2C_CR1中的START置1
EV可以理解为:组合了好几个标志位的 大标志位
EV5: SB = 1当检测EV5完成后,就可以发送一个字节的从机地址了,从机地址需要写入数据寄存器DR中,当这个字节写入到数据寄存器DR时,硬件电路就会自动将这一个字节转移到移位寄存器中,再把这一个字节发送到I2C的SDA总线上,之后硬件会自动接收应答位并判断,如果没有应答,硬件会置硬件失败的标志位,然后这个失败的标志位可以申请中断来告诉我们
EV6: ADDR = 1 地址发送结束
EV8_1: TXE = 1 移位和数据寄存器都是空,需要我们向数据寄存器写入数据
EV8: TXE = 1 移位寄存器非空,数据寄存器是空,也就是说 我们可以将新的数据写进 数据寄存器了 所以 当EV8产生的时候 也就是我们能将新数据写入到 数据寄存器的时候
EV8_2: TXE = 1; BTF = 1 此时是 移位和数据寄存器都是空,我们没有新数据要继续发送给从机了, BTF = 1字节发送结束
控制寄存器I2C_CR1👇
START:起始条件产生 (Start generation) 软件可以设置或清除该位,或当起始条件发出后或PE=0时,由硬件清除。
在主模式下:
0 : 无起始条件产生;
1:重复产生起始条件。
在从模式下:
0:无起始条件产生;
1:当总线空闲时,产生起始条件。
STOP:停止条件产生 (Stop generation)
软件可以设置或清除该位;或当检测到停止条件时,由硬件清除;当检测到超时错误时,硬件 将其置位。
在主模式下:
0:无停止条件产生;
1:在当前字节传输或在当前起始条件发出后产生停止条件。
在从模式下:
0:无停止条件产生;
1:在当前字节传输或释放SCL和SDA线。
注:当设置了STOP、START或PEC位,在硬件清除这个位之前,软件不要执行任何对 I2C_CR1的写操作;否则有可能会第2次设置STOP、START或PEC位。
ACK:应答使能 (Acknowledge enable)
软件可以设置或清除该位,或当PE=0时,由硬件清除。
0:无应答返回;
1:在接收到一个字节后返回一个应答(匹配的地址或数据)。
PE:I2C模块使能 (Peripheral enable)
0:禁用I 2 C模块;
1:启用I 2 C模块:根据SMBus位的设置,相应的I/O口需配置为复用功能。
注:如果清除该位时通讯正在进行,在当前通讯结束后,I 2 C模块被禁用并返回空闲状态。 由于在通讯结束后发生PE=0,所有的位被清除。
在主模式下,通讯结束之前,绝不能清除该位。
状态寄存器 1(I2C_SR1)👇
SB:起始位(主模式) (Start bit (Master mode))
0:未发送起始条件;
1:起始条件已发送。
– 当发送出起始条件时该位被置’1’。
– 软件读取SR1寄存器后,写数据寄存器的操作将清除该位,或当PE=0时,硬件清除该位。
TxE:数据寄存器为空(发送时) (Data register empty (transmitters))
0:数据寄存器非空;
1:数据寄存器空。
– 在发送数据时,数据寄存器为空时该位被置’1’,在发送地址阶段不设置该位。
– 软件写数据到DR寄存器可清除该位;或在发生一个起始或停止条件后,或当PE=0时由硬件 自动清除。
如果收到一个NACK,或下一个要发送的字节是PEC(PEC=1),该位不被置位。
注:在写入第1个要发送的数据后,或设置了BTF时写入数据,都不能清除TxE位,这是因为 数据寄存器仍然为空。
ADDR:地址已被发送(主模式)/地址匹配(从模式) (Address sent (master mode)/matched (slave mode))
在软件读取SR1寄存器后,对SR2寄存器的读操作将清除该位,或当PE=0时,由硬件清除该 位。
地址匹配(从模式)
0:地址不匹配或没有收到地址;
1:收到的地址匹配。
– 当收到的从地址与OAR寄存器中的内容相匹配、或发生广播呼叫、或SMBus设备默认地址 或SMBus主机识别出SMBus提醒时,硬件就将该位置’1’(当对应的设置被使能时)。
地址已被发送(主模式)
0:地址发送没有结束;
1:地址发送结束。
– 10位地址模式时,当收到地址的第二个字节的ACK后该位被置’1’。
– 7位地址模式时,当收到地址的ACK后该位被置’1’。
注:在收到NACK后,ADDR位不会被置位。
BTF:字节发送结束 (Byte transfer finished)
0:字节发送未完成;
1:字节发送结束。 当NOSTRETCH=0时,在下列情况下硬件将该位置’1’:
– 在接收时,当收到一个新字节(包括ACK脉冲)且数据寄存器还未被读取(RxNE=1)。
– 在发送时,当一个新数据将被发送且数据寄存器还未被写入新的数据(TxE=1)。
– 在软件读取SR1寄存器后,对数据寄存器的读或写操作将清除该位;或在传输中发送一个起始或停止条件后,或当PE=0时,由硬件清除该位。
注:在收到一个NACK后,BTF位不会被置位。 如果下一个要传输的字节是PEC(I2C_SR2寄存器中TRA为’1’,同时I2C_CR1寄存器中PEC 为’1’),BTF位不会被置位。
数据寄存器 1(I2C_DR)👇
DR[7:0]:8位数据寄存器 (8-bit data register)
用于存放接收到的数据或放置用于发送到总线的数据
发送器模式:当写一个字节至DR寄存器时,自动启动数据传输。一旦传输开始(TxE=1),如果 能及时把下一个需传输的数据写入DR寄存器,I 2 C模块将保持连续的数据流。
接收器模式:接收到的字节被拷贝到DR寄存器(RxNE=1)。在接收到下一个字节(RxNE=1)之 前读出数据寄存器,即可实现连续的数据传送。
注:在从模式下,地址不会被拷贝进数据寄存器DR;
注:硬件不管理写冲突(如果TxE=0,仍能写入数据寄存器);
注:如果在处理ACK脉冲时发生ARLO事件,接收到的字节不会被拷贝到数据寄存器里,因此 不能读到它。
I2C之STM32接收流程
下放的7位主接收时序,很明显是 当前地址读 的模式,并没有给我们 指定地址读所以还需要我们进行相对应的配置
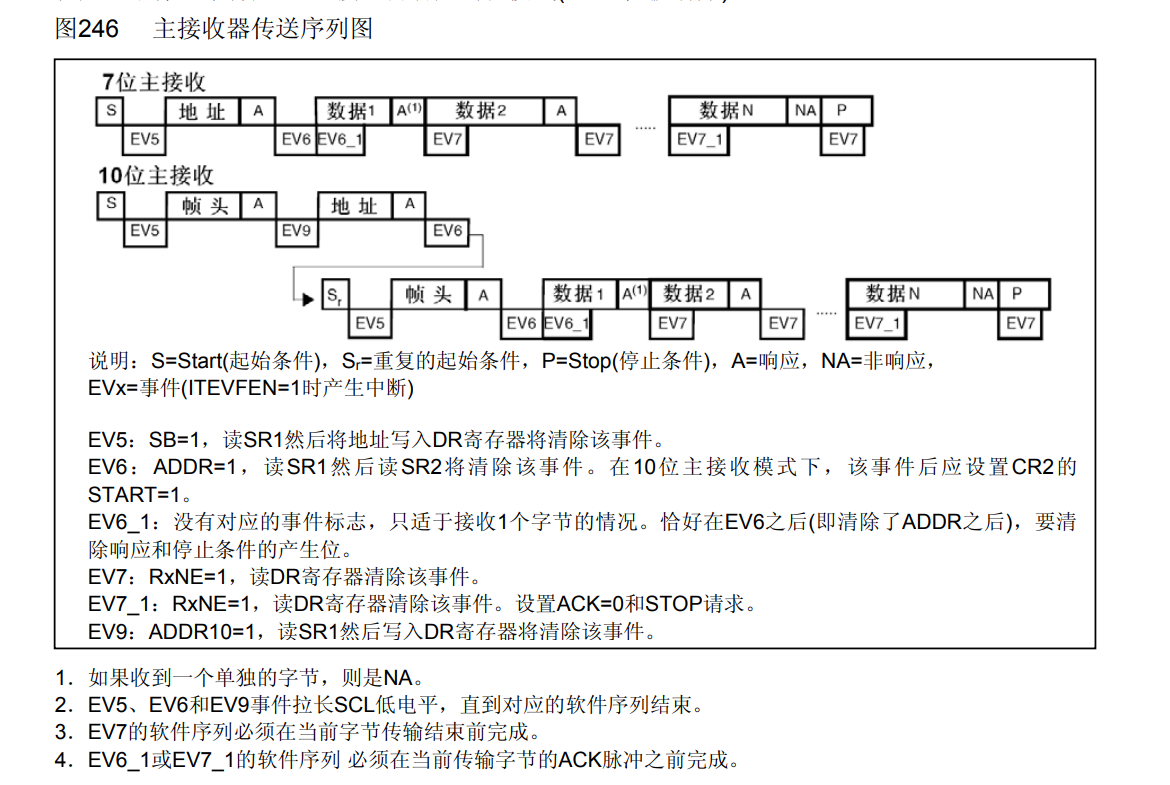
默认情况下,STM32的I2C接口总是工作在从模式。从从模式切换到主模式,需要产生一个起始条件 也就是将 I2C的控制寄存器I2C_CR1中的START置1
EV可以理解为:组合了好几个标志位的 大标志位
EV5: SB = 1当检测EV5完成后,就可以发送一个字节的从机地址了,从机地址需要写入数据寄存器DR中,当这个字节写入到数据寄存器DR时,硬件电路就会自动将这一个字节转移到移位寄存器中,再把这一个字节发送到I2C的SDA总线上,之后硬件会自动接收应答位并判断,如果没有应答,硬件会置硬件失败的标志位,然后这个失败的标志位可以申请中断来告诉我们
EV6: ADDR = 1 地址发送结束
EV6_1:该事件发生时,其数据1其实还在移位,还没收到数据1,所以并没有标志位,当数据1接收完成,硬件会自动根据我们的配置将应答位发送出去,表示这个时序单元已经结束,说明移位寄存器已经成功移入了一个字节的数据1了,之后将这一个字节的数据1从 移位寄存器 发送给 数据寄存器
EV7:RXNE=1,表示数据寄存器非空,如果STM32对该数据寄存器进行读取,硬件会将RXNE位置零,当然数据还没有被读走的时候,数据2已经可以进入移位寄存器了
EV7_1:当不想在继续读取数据时,需要提前将最后一个读取数据的应答位ACK 写非应答 也就是置0,同时设置终止条件请求STOP
I2C的外设应用
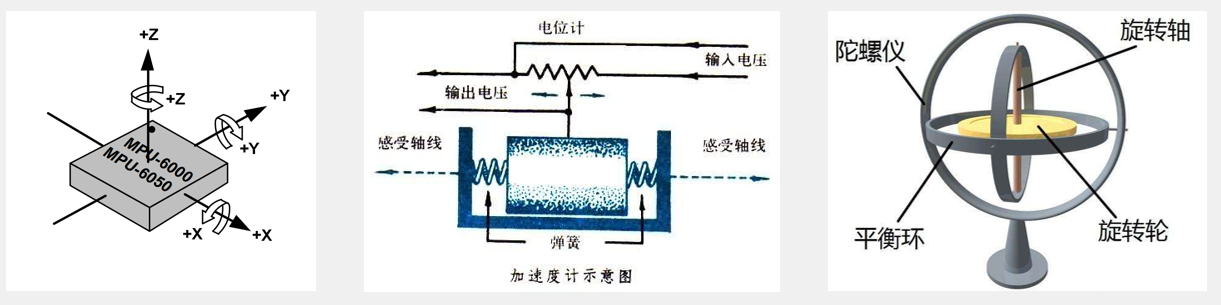
MPU6050的介绍
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景
-
3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
-
3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
MPU6050的参数:
-
16位ADC采集传感器的模拟信号,量化范围:-32768~32767
-
加速度计满量程选择:±2、±4、±8、±16(g)
-
陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
-
可配置的数字低通滤波器
-
可配置的时钟源
-
可配置的采样分频
-
I2C的地址
- 1101000(AD0=0)
- 1101001(AD0=1)
未待完续之更详细的MPU6050的笔记
I2C的实战演习
为什么分 软件读写 和 硬件读写 ?
- 软件读写 是完全利用I2C的基本原理 时序来写的 ,也就是说无论使用那个 GPIO口都可以实现本操作,甚至你可以使用其它型号的MCU都可以的,只要逻辑和软件读写的一样,当然还要看一下双方支持最大的引脚接收翻转的频率
- 硬件读写 因为在这里学习的是STM32单片机,而且它内部已经拥有I2C外设,这样很方便快捷我们的操作,所以在了解I2C是什么的基础上我们学习STM32的I2C外设会更加快速方便助我们使用 -- 库函数
软件模拟I2C之MPU6050
MyI2C.h
#ifndef __MYI2C_H__//如果没有定义了则参加以下编译
#define __MYI2C_H__//一旦定义就有了定义 所以 其目的就是防止模块重复编译
#include "stm32f10x.h"
#include "Delay.h"
void MyI2C_W_SCL(uint8_t BitValue);
void MyI2C_W_SDA(uint8_t BitValue);
uint8_t MyI2C_R_SDA(void);
void MyI2C_Init(void);
void MyI2C_Start(void);
void MyI2C_Stop(void);
void MyI2C_SendByte(uint8_t Byte);
uint8_t MyI2C_ReceiveByte(void);
void MyI2C_SendAck(uint8_t AckBit);
uint8_t MyI2C_ReceiveAck(void);
#endif //结束编译
MyI2C.c
#include "MyI2C.h"
/*
PB10 -- SCL
PB11 -- SDA
*/
//以下这些引脚操作 可使用带参宏定义
/**
* @brief 主机发送时钟SCL
* @param
* @retval
*/
void MyI2C_W_SCL(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue);
Delay_us(10);//如果单片机主频比较快 可增加引脚延时
}
/**
* @brief 主机发送数据SDA -- 按位 每次都是改变GPIO的高低电平
BitValue 即使传入的是0X80 -- (BitAction)转成1 传入0X00 -- (BitAction)转成0
* @param
* @retval
*/
void MyI2C_W_SDA(uint8_t BitValue)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue);
Delay_us(10);
}
/**
* @brief 主机接收数据SDA -- 按位 每次都是GPIO接收外部电平的变化
* @param
* @retval
*/
uint8_t MyI2C_R_SDA(void)
{
uint8_t BitValue;
BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11);
Delay_us(10);
return BitValue;
}
/**
* @brief I2C引脚初始化
* @param
* @retval
*/
void MyI2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//为初始化函数做准备
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11;//设置PB10,PB11引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD ;//设置输出模式为开漏输出(也是可以输入的 先输出1 再读取输入数据寄存器就可)
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
//初始化函数↓
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11);//初始化为高电平 即总线空闲状态
}
/**
* @brief I2C起始条件 -- SCL高电平期间,SDA从 高电平 切换到 低电平
* @param
* @retval
*/
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);//SDA在前 为了确保SDA上升沿
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);
MyI2C_W_SCL(0);//起始条件后 将SCL拉低 拼接发送发送数据格式
}
/**
* @brief I2C停止条件 -- SCL高电平期间,SDA从 低电平 切换到 高电平
* @param
* @retval
*/
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0);//SDA在前 为了确保SDA下降沿
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
}
/**
* @brief I2C发送字节 -- SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,
从机将在SCL高电平期间读取数据位
* @param
* @retval
*/
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++)
{
MyI2C_W_SDA(Byte & (0x80 >> i));//按位操作 依次取最高位 -- 第一个对应上 起始条件的SCL低电平
MyI2C_W_SCL(1);//高电平期间发送数据
MyI2C_W_SCL(0);//低电平期间数据变换
}
}
/**
* @brief I2C接收字节 -- SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,
主机将在SCL高电平期间读取数据位
* @param
* @retval
*/
uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00;
MyI2C_W_SDA(1);//为了防止主机干扰从机的数据发送 主机将开启并保持高阻态 总线SDA只能由从机控制 也就相当于开启了输入模式
for (i = 0; i < 8; i ++)
{
MyI2C_W_SCL(1);//①接受完应答位后 先把时钟线拉高 来读取从机发送过来的数据 -- 高电平期间接收数据
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}//那个字节是 就把 那一位置1 高位先行
MyI2C_W_SCL(0);//低电平期间数据变换
}
return Byte;
}
/**
* @brief I2C主机发送应答 -- 数据0表示应答,数据1表示非应答
* @param
* @retval
*/
void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);//是否应答
MyI2C_W_SCL(1);//高电平期间发送数据
MyI2C_W_SCL(0);//拉低SCL
}
/**
* @brief I2C主机接收应答 -- 数据0表示应答,数据1表示非应答
* @param
* @retval
*/
uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1);//主机释放SDA 从机控制SDA
MyI2C_W_SCL(1);//高电平期间接收数据
AckBit = MyI2C_R_SDA();//接收从机发送过来的应答位
MyI2C_W_SCL(0);//拉低SCL
return AckBit;//返回 从机是否应答
}
可以在主函数中使用下面的代码 来检测I2C的代码逻辑是否有误 没有则 MPU6050会传给你一个0应答
OLED_Init(); MyI2C_Init(); MyI2C_Start(); MyI2C_SendByte(0XD0); uint8_t ACK = MyI2C_ReceiveAck(); OLED_ShowNum(1,1,ACK,2);
MPU6050.h
#ifndef __MPU6050_H__//如果没有定义了则参加以下编译
#define __MPU6050_H__//一旦定义就有了定义 所以 其目的就是防止模块重复编译
#include "stm32f10x.h"
#include "MyI2C.h"
#define MPU6050_ADDRESS 0xD0 //默认为写操作 1101 000 0
#define MPU6050_SMPLRT_DIV 0x19 //采样率分频寄存器地址 -- 地址内容就是采样分频
#define MPU6050_CONFIG 0x1A //配置寄存器 -- Bit5~3(外部同步 000不需要) Bit2~0(数字低通滤波器 -- 110最平滑的滤波)
#define MPU6050_GYRO_CONFIG 0x1B //陀螺仪寄存器 -- Bit7~5(自测使能 000不自测)Bit4~3(满量程选择 11最大量程)后三位为无关位
#define MPU6050_ACCEL_CONFIG 0x1C //加速度计配置寄存器 -- Bit7~5(自测使能 000不自测)Bit4~3(满量程选择 11最大量程)Bit2~0(高通滤波器 000不使用)
#define MPU6050_ACCEL_XOUT_H 0x3B //加速度计X 高8位
#define MPU6050_ACCEL_XOUT_L 0x3C //加速度计X 低8位
#define MPU6050_ACCEL_YOUT_H 0x3D //加速度计Y 高8位
#define MPU6050_ACCEL_YOUT_L 0x3E //加速度计Y 低8位
#define MPU6050_ACCEL_ZOUT_H 0x3F //加速度计Z 高8位
#define MPU6050_ACCEL_ZOUT_L 0x40 //加速度计Z 低8位
#define MPU6050_TEMP_OUT_H 0x41 //温度 高8位
#define MPU6050_TEMP_OUT_L 0x42 //温度 低8位
#define MPU6050_GYRO_XOUT_H 0x43 //陀螺仪计X 高8位
#define MPU6050_GYRO_XOUT_L 0x44 //陀螺仪计X 低8位
#define MPU6050_GYRO_YOUT_H 0x45 //陀螺仪计Y 高8位
#define MPU6050_GYRO_YOUT_L 0x46 //陀螺仪计Y 低8位
#define MPU6050_GYRO_ZOUT_H 0x47 //陀螺仪计Z 高8位
#define MPU6050_GYRO_ZOUT_L 0x48 //陀螺仪计Z 低8位
#define MPU6050_PWR_MGMT_1 0x6B //电源管理 --设备复位(不复位),睡眠模式(0解除睡眠),循环模式(0不循环),无关位(给0),温度传感器(0不失能),时钟(000选择内部时钟 001陀螺仪时钟)
#define MPU6050_PWR_MGMT_2 0x6C //电源管理 --(前两位)循环模式和唤醒频率(00不需要) 后6位每一个轴的待机位(全给0 不需要待机)
#define MPU6050_WHO_AM_I 0x75 //查询芯片ID号 -- 0X68 0 110 1000 其实就是7地址
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif //结束编译
MPU6050.c
#include "MPU6050.h"
//此代码优化处 可处理是否应答了
/**
* @brief 指定地址写 -- 对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
* @param
* @retval
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);//指定设备·写
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);//指定地址
MyI2C_ReceiveAck();
//想要写入多个字节 可以 在把下面两行代码 加入一个for循环 然后参数输入一个数组即可
MyI2C_SendByte(Data);//写入数据 1字节
MyI2C_ReceiveAck();
MyI2C_Stop();
}
/**
* @brief 指定地址读 -- 对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)
* @param
* @retval
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);//指定设备·写
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);//指定地址
MyI2C_ReceiveAck();
MyI2C_Start();//重新起始
MyI2C_SendByte(MPU6050_ADDRESS | 0x01);////指定设备·读
MyI2C_ReceiveAck();
//想要写入多个字节 可以 在把下面代码 加入一个for循环 读出来的数据保存到一个数组内
//同时要改为 应答从机 MyI2C_SendAck(0); 在读完最后一个 不应答 MyI2C_SendAck(1);
Data = MyI2C_ReceiveByte();//读取数据 1字节
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理1
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理2
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪寄存器
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器
}
/**
* @brief 获取MPU6050的ID号
* @param
* @retval
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
/**
* @brief 获取加速度计,陀螺仪数据
* @param
* @retval
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;//加速度计X 16位的数据 PS:虽然DataH是8位的 然后左移8位 由于运算时计算结果并不存储在data变量中 所以最后赋值给16位的也没什么影响
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;//加速度计Y
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;//加速度计Z
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;//陀螺仪X
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;//陀螺仪Y
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;//陀螺仪Z
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MyI2C.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while(1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
硬件读写I2C之MPU6050
请结合STM32的发送流程和接收流程 进行研究以下代码 会更加的清晰
MPU6050.h
#ifndef __MPU6050_H__//如果没有定义了则参加以下编译
#define __MPU6050_H__//一旦定义就有了定义 所以 其目的就是防止模块重复编译
#include "stm32f10x.h"
#define MPU6050_ADDRESS 0xD0 //默认为写操作 1101 000 0
#define MPU6050_SMPLRT_DIV 0x19 //采样率分频寄存器地址 -- 地址内容就是采样分频
#define MPU6050_CONFIG 0x1A //配置寄存器 -- Bit5~3(外部同步 000不需要) Bit2~0(数字低通滤波器 -- 110最平滑的滤波)
#define MPU6050_GYRO_CONFIG 0x1B //陀螺仪寄存器 -- Bit7~5(自测使能 000不自测)Bit4~3(满量程选择 11最大量程)后三位为无关位
#define MPU6050_ACCEL_CONFIG 0x1C //加速度计配置寄存器 -- Bit7~5(自测使能 000不自测)Bit4~3(满量程选择 11最大量程)Bit2~0(高通滤波器 000不使用)
#define MPU6050_ACCEL_XOUT_H 0x3B //加速度计X 高8位
#define MPU6050_ACCEL_XOUT_L 0x3C //加速度计X 低8位
#define MPU6050_ACCEL_YOUT_H 0x3D //加速度计Y 高8位
#define MPU6050_ACCEL_YOUT_L 0x3E //加速度计Y 低8位
#define MPU6050_ACCEL_ZOUT_H 0x3F //加速度计Z 高8位
#define MPU6050_ACCEL_ZOUT_L 0x40 //加速度计Z 低8位
#define MPU6050_TEMP_OUT_H 0x41 //温度 高8位
#define MPU6050_TEMP_OUT_L 0x42 //温度 低8位
#define MPU6050_GYRO_XOUT_H 0x43 //陀螺仪计X 高8位
#define MPU6050_GYRO_XOUT_L 0x44 //陀螺仪计X 低8位
#define MPU6050_GYRO_YOUT_H 0x45 //陀螺仪计Y 高8位
#define MPU6050_GYRO_YOUT_L 0x46 //陀螺仪计Y 低8位
#define MPU6050_GYRO_ZOUT_H 0x47 //陀螺仪计Z 高8位
#define MPU6050_GYRO_ZOUT_L 0x48 //陀螺仪计Z 低8位
#define MPU6050_PWR_MGMT_1 0x6B //电源管理 --设备复位(不复位),睡眠模式(0解除睡眠),循环模式(0不循环),无关位(给0),温度传感器(0不失能),时钟(000选择内部时钟 001陀螺仪时钟)
#define MPU6050_PWR_MGMT_2 0x6C //电源管理 --(前两位)循环模式和唤醒频率(00不需要) 后6位每一个轴的待机位(全给0 不需要待机)
#define MPU6050_WHO_AM_I 0x75 //查询芯片ID号 -- 0X68 0 110 1000 其实就是7地址
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);
#endif //结束编译
MPU6050.C
#include "MPU6050.h"
/**
* @brief 判断 等待 EV事件 是否完成 -- 标志位的作用 并增加超时机制
* @param
* @retval
*/
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
}
//此代码优化处 可处理是否应答了
/**
* @brief 指定地址写 -- 对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
* @param
* @retval
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE); //I2C起始位
/*
*软件读写I2C中,我们有堵塞Delay函数 可以等待 数据发送完成
*硬件读写I2C中,没有堵塞函数,硬件I2C函数只管给寄存器置1,至于波形是否发送完毕它是不管的,
所以我们需要在函数执行完后,等待相应的标志位,来确保函数的操作执行到位 使用 事件 来观察
*/
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5事件 -- SB=1 当发送出起始条件时该位被置’1’
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);//设备从机地址 第三个参数是给读写位 置1或者置0 --置0写
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6事件 -- ADDR = 1 地址发送结束
/*
*接收应答并不需要一个专门的函数来操作 发送/接收函数都自带了接收/发送应答的过程
*如果应答错误 硬件会通过标志位 和 中断 来提示我们
*PS:我并没在发送/接收函数中发现自带应答 难道是因为初始化的时候I2C_Ack_Enable所以不需要了吗 -- 结合下个函数的EV6_1事件 所以应该就是我认为的这个I2C_Ack_Enable产生的自动应答 --??未待完续
*/
/*EV8_1事件,并不需要等待,是告诉我们该向DR写入数据 然后发送了 所以我们直接写入数据即可*/
I2C_SendData(I2C2, RegAddress);//指定地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);//EV8事件 -- TXE = 1 移位寄存器非空,数据寄存器是空,可以写入新数据
I2C_SendData(I2C2, Data);//发送数据
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2事件 -- TXE = 1; BTF = 1 此时是 移位和数据寄存器都是空,没有新的写入DR数据寄存器了
I2C_GenerateSTOP(I2C2, ENABLE);//I2C停止位
}
/**
* @brief 指定地址读 -- 对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)
* @param
* @retval
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE);//I2C起始位
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5事件 -- SB=1 当发送出起始条件时该位被置’1’
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);//设备从机地址 第三个参数是给读写位 置1或者置0 --置0写
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6事件 -- ADDR = 1 地址发送结束
I2C_SendData(I2C2, RegAddress);//指定地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2事件-- TXE = 1; BTF = 1 此时是 移位和数据寄存器都是空,没有新的写入DR数据寄存器了
/*
*细节研究 在重新起始的上面是 使用EV8事件(TXE = 1 移位寄存器非空,数据寄存器是空,可以写入新数据) 还是EV8_2事件(移位和数据寄存器都是空)呢?
*使用EV8:在使用EV8时,也就是EV8完成了==可以写入新数据了==可以下一步操作了,此时RegAddress的波形还没有发送完毕
-- 我们是否可以直接重新起始?让START位置1? 这样操作会不会把数据流截断? -- 经过JKD老师的实测并不会截断
-- 因为在调用重复起始后 如果当前还要数据在移位 它会等到数据移位完成后 再重复起始
*使用EV8_2:保险!它是等待移位和数据都完成
*/
I2C_GenerateSTART(I2C2, ENABLE);//重新起始
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5事件 -- SB=1 当发送出起始条件时该位被置’1’
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);//设备从机地址 第三个参数是给读写位 置1或者置0 -- 置1读
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//EV6事件 -- 这个和上面的EV6都不一样 这个是主机接收的EV6事件
/*EV6_1不需要等待,它是指定读一个字节 而我们这个函数就是指定读一个字节
*但是我们要注意它的要求 虽然不用等待 但是 要清除响应和产生停止条件
*不要疑惑 为什么数据还没接收到 就给先给 非应答和停止位了
*是因为如果你在接收一个数据后再给 按时序图已经给完应答了 再给就晚了
*并且停止位也不会截断当前字节 它会等字节接收完成后 再产生终止条件的波形
*/
/*如果你要接收多个字节 那么在接收完第一个字节后 你只需判断EV7事件是否完成
*循环多次就可以接收多个字节
*同上面EV6_1同理 也需要在最后一个数据收到之前提前 写入非应答和置停止位
*/
I2C_AcknowledgeConfig(I2C2, DISABLE);//应答位 -- 置0非应答
I2C_GenerateSTOP(I2C2, ENABLE);//I2C停止位
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV7事件 -- RXNE=1,表示数据寄存器非空,表示可以读取DR数据了
Data = I2C_ReceiveData(I2C2);//读取数据
I2C_AcknowledgeConfig(I2C2, ENABLE);//使能应答位 恢复I2C_ACK_ENABLE
return Data;
}
void MPU6050_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2,ENABLE);;
//GPIO初始化
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11;//设置PB10,PB11引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD ;//设置输出模式为复用开漏输出(也是可以输入的 读取的数值输入到I2C的移位寄存器就可)
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ;//设置输出速度为50MHZ
GPIO_Init(GPIOB,&GPIO_InitStructure);//初始化
//I2C结构初始化
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //初始化模式
I2C_InitStructure.I2C_ClockSpeed = 50000; //0~100KHZ标准速度状态 100KHZ~400KHZ之间快速速度状态
/* I2C_DutyCycle -- SCL时钟占空比
* 在小于等于100KZ的标准速度下 占空比是固定的 低电平时间:高电平时间 = 1:1
* 占空比是为了快速传输数据而设计的 由于若上拉所以数据的上升沿变化比较慢 所以在快速传输的状态下增大了低电平的占空比
*/
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //应答位 -- 默认给应答ACK==1
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //STM32作为从机的地址 选择响应7位/10位地址
I2C_InitStructure.I2C_OwnAddress1 = 0x00; //STM32作为从机的自身地址 方便别的主机呼叫 -- 随便给一个和上面位数相同的地址
//使能I2C2
I2C_Init(I2C2, &I2C_InitStructure);
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理1
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理2
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪寄存器
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器
}
/**
* @brief 获取MPU6050的ID号
* @param
* @retval
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
/**
* @brief 获取加速度计,陀螺仪数据
* @param
* @retval
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;//加速度计X 16位的数据 PS:虽然DataH是8位的 然后左移8位 由于运算时计算结果并不存储在data变量中 所以最后赋值给16位的也没什么影响
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;//加速度计Y
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;//加速度计Z
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;//陀螺仪X
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;//陀螺仪Y
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;//陀螺仪Z
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while(1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
I2C的库函数
Table 1. I2C 库函数
| 函数名 | 描述 | |
|---|---|---|
| I2C_DeInit | 将外设 I2Cx 寄存器重设为缺省值 | |
| I2C_Init | 根据 I2C_InitStruct 中指定的参数初始化外设 I2Cx 寄存器 | |
| I2C_StructInit | 把 I2C_InitStruct 中的每一个参数按缺省值填入 | |
| I2C_Cmd | 使能或者失能 I2C 外设 | |
| I2C_DMACmd | 使能或者失能指定 I2C 的 DMA 请求 | |
| I2C_DMALastTransferCmd | 使下一次 DMA 传输为 后一次传输 | |
| I2C_GenerateSTART | 产生 I2Cx 传输 START 条件 | |
| I2C_GenerateSTOP | 产生 I2Cx 传输 STOP 条件 | |
| I2C_AcknowledgeConfig | 使能或者失能指定 I2C 的应答功能 | |
| I2C_OwnAddress2Config | 设置指定 I2C 的自身地址 2 | |
| I2C_DualAddressCmd | 使能或者失能指定 I2C 的双地址模式 | |
| I2C_GeneralCallCmd | 使能或者失能指定 I2C 的广播呼叫功能 | |
| I2C_ITConfig | 使能或者失能指定的 I2C 中断 | |
| I2C_SendData | 通过外设 I2Cx 发送一个数据 | |
| I2C_ReceiveData | 返回通过 I2Cx 近接收的数据 | |
| I2C_Send7bitAddress | 向指定的从 I2C 设备传送地址字 | |
| I2C_ReadRegister | 读取指定的 I2C 寄存器并返回其值 | |
| I2C_SoftwareResetCmd | 使能或者失能指定 I2C 的软件复位 | |
| I2C_SMBusAlertConfig | 驱动指定 I2Cx 的 SMBusAlert 管脚电平为高或低 | |
| I2C_TransmitPEC | 使能或者失能指定 I2C 的 PEC 传输 | |
| I2C_PECPositionConfig | 选择指定 I2C 的 PEC 位置 | |
| I2C_CalculatePEC | 使能或者失能指定 I2C 的传输字 PEC 值计算 | |
| I2C_GetPEC | 返回指定 I2C 的 PEC 值 | |
| I2C_ARPCmd | 使能或者失能指定 I2C 的 ARP | |
| I2C_StretchClockCmd | 使能或者失能指定 I2C 的时钟延展 | |
| I2C_FastModeDutyCycleConfig | 选择指定 I2C 的快速模式占空比 | |
| I2C_GetLastEvent | 返回 近一次 I2C 事件 | |
| I2C_CheckEvent | 检查 近一次 I2C 事件是否是输入的事件 | |
| I2C_GetFlagStatus | 检查指定的 I2C 标志位设置与否 | |
| I2C_ClearFlag | 清除 I2Cx 的待处理标志位 | |
| I2C_GetITStatus | 检查指定的 I2C 中断发生与否 | |
| I2C_ClearITPendingBit | 清除 I2Cx 的中断待处理位 |
函数 I2C_ Init
Table 2. 函数 I2C_Init
| 函数名 | I2C_Init |
|---|---|
| 函数原形 | void I2C_Init(I2C_TypeDef* I2Cx, I2C_InitTypeDef* I2C_InitStruct) |
| 功能描述 | 根据 I2C_InitStruct 中指定的参数初始化外设 I2Cx 寄存器 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | I2C_InitStruct:指向结构 I2C_InitTypeDef 的指针,包含了外设 GPIO 的配置信息参阅 Section:I2C_InitTypeDef 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
I2C_InitTypeDef structure
//I2C_InitTypeDef 定义于文件“stm32f10x_i2c.h”:
typedef struct
{
u16 I2C_Mode;
u16 I2C_DutyCycle;
u16 I2C_OwnAddress1;
u16 I2C_Ack;
u16 I2C_AcknowledgedAddress;
u32 I2C_ClockSpeed;
} I2C_InitTypeDef;
参数 I2C_Mode
I2C_Mode 用以设置 I2C 的模式。Table 208. 给出了该参数可取的值
Table 3. I2C_Mode 值
| I2C_Mode | 描述 |
|---|---|
| I2C_Mode_I2C | 设置 I2C 为 I2C 模式 |
| I2C_Mode_SMBusDevice | 设置 I2C 为 SMBus 设备模式 |
| I2C_Mode_SMBusHost | 设置 I2C 为 SMBus 主控模式 |
参数 I2C_DutyCycle
I2C_DutyCycle 用以设置 I2C 的占空比。Table 209. 给出了该参数可取的值
Table 4. I2C_DutyCycle 值
| I2C_DutyCycle | 描述 |
|---|---|
| I2C_DutyCycle_16_9 | I2C 快速模式 Tlow / Thigh = 16/9 |
| I2C_DutyCycle_2 | I2C 快速模式 Tlow / Thigh = 2 |
注意:该参数只有在 I2C 工作在快速模式(时钟工作频率高于 100KHz)下才有意义。
参数 I2C_OwnAddress1
该参数用来设置第一个设备自身地址,它可以是一个 7 位地址或者一个 10 位地址。
参数 I2C_Ack
I2C_Ack 使能或者失能应答(ACK),Table 210. 给出了该参数可取的值
Table 5. I2C_Ack 值
| I2C_Ack | 描述 | |
|---|---|---|
| I2C_Ack_Enable | 使能应答(ACK) | |
| I2C_Ack_Disable | 失能应答(ACK) |
参数 I2C_AcknowledgedAddress
I2C_AcknowledgedAddres 定义了应答 7 位地址还是 10 位地址。Table 211. 给出了该参数可取的值
Table 6. I2C_AcknowledgedAddres 值
| I2C_AcknowledgedAddres | 描述 | |
|---|---|---|
| I2C_AcknowledgeAddress_7bit | 应答 7 位地址 | |
| I2C_AcknowledgeAddress_10bit | 应答 10 位地址 |
参数 I2C_ClockSpeed
该参数用来设置时钟频率,这个值不能高于 400KHz。
例:
/* Initialize the I2C1 according to the I2C_InitStructure members */
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_SMBusHost;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x03A2;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_ClockSpeed = 200000;
I2C_Init(I2C1, &I2C_InitStructure);
函数 I2C_ Cmd
Table 7. 函数 I2C_ Cmd
| 函数名 | I2C_ Cmd |
|---|---|
| 函数原形 | void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState NewState) |
| 功能描述 | 使能或者失能 I2C 外设 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | NewState: 外设 I2Cx 的新状态这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Enable I2C1 peripheral */
I2C_Cmd(I2C1, ENABLE);
函数 I2C_ GenerateSTART
Table 217. 函数 I2C_ GenerateSTART
| 函数名 | I2C_ GenerateSTART |
|---|---|
| 函数原形 | void I2C_GenerateSTART(I2C_TypeDef* I2Cx, FunctionalState NewState) |
| 功能描述 | 产生 I2Cx 传输 START 条件 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | NewState: I2Cx START 条件的新状态 这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Generate a START condition on I2C1 */
I2C_GenerateSTART(I2C1, ENABLE);
函数 I2C_ GenerateSTOP
Table 218. 函数 I2C_ GenerateSTOP
| 函数名 | I2C_ GenerateSTOP |
|---|---|
| 函数原形 | void I2C_GenerateSTOP(I2C_TypeDef* I2Cx, FunctionalState NewState) |
| 功能描述 | 产生 I2Cx 传输 STOP 条件 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | NewState: I2Cx STOP 条件的新状态 这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Generate a STOP condition on I2C2 */
I2C_GenerateSTOP(I2C2, ENABLE);
函数 I2C_ AcknowledgeConfig
Table 219. 函数 I2C_ AcknowledgeConfig
| 函数名 | I2C_ AcknowledgeConfig |
|---|---|
| 函数原形 | void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx, FunctionalState NewState) |
| 功能描述 | 使能或者失能指定 I2C 的应答功能 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | NewState: I2Cx 应答的新状态 这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Enable the I2C1 Acknowledgement */
I2C_AcknowledgeConfig(I2C1, ENABLE);
函数 I2C_ SendData
Table 225. 函数 I2C_ SendData
| 函数名 | I2C_ SendData |
|---|---|
| 函数原形 | void I2C_SendData(I2C_TypeDef* I2Cx, u8 Data) |
| 功能描述 | 通过外设 I2Cx 发送一个数据 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | Data: 待发送的数据 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Transmit 0x5D byte on I2C2 */
I2C_SendData(I2C2, 0x5D);
函数 I2C_ ReceiveData
Table 226. 函数 I2C_ReceiveData
| 函数名 | I2C_ ReceiveData |
|---|---|
| 函数原形 | u8 I2C_ReceiveData(I2C_TypeDef* I2Cx) |
| 功能描述 | 返回通过 I2Cx 近接收的数据 |
| 输入参数 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输出参数 | 无 |
| 返回值 | 接收到的字 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
例:
/* Read the received byte on I2C1 */
u8 ReceivedData;
ReceivedData = I2C_ReceiveData(I2C1);
函数 I2C_ Send7bitAddress
Table 227. 函数 I2C_ Send7bitAddress
| 函数名 | I2C_ Send7bitAddress |
|---|---|
| 函数原形 | void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, u8 Address, u8 I2C_Direction) |
| 功能描述 | 向指定的从 I2C 设备传送地址字 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | Address: 待传输的从 I2C 地址 |
| 输入参数 3 | I2C_Direction:设置指定的 I2C 设备工作为发射端还是接收端参阅 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
I2C_Direction
该参数设置 I2C 界面为发送端模式或者接收端模式(见 Table 228.)。
Table 228. I2C_Direction 值
| I2C_Direction | 描述 | |
|---|---|---|
| I2C_Direction_Transmitter | 选择发送方向 | |
| I2C_Direction_Receiver | 选择接收方向 |
例:
/* Send, as transmitter, the Slave device address 0xA8 in 7-bit addressing mode in I2C1 */
I2C_Send7bitAddress(I2C1, 0xA8, I2C_Direction_Transmitter);
函数 I2C_CheckEvent
| 函数名 | I2C_CheckEvent |
|---|---|
| 函数原形 | ErrorStatus I2C_CheckEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT) |
| 功能描述 | 检查最后一个 I2Cx 事件是否等于传递的事件作为参数。 |
| 输入参数 1 | I2Cx:其中 x 可以是 1 或 2 以选择 I2C 外设 |
| 输入参数 2 | I2C_EVENT:指定要检查的事件 |
| 输出参数 | 无 |
| 返回值 | 错误状态枚举值: * 成功:最后一个事件等于I2C_EVENT * 错误:上一个事件与I2C_EVENT不同 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
函数原型:
/**
* @brief Checks whether the last I2Cx Event is equal to the one passed
* as parameter.
* @param I2Cx: where x can be 1 or 2 to select the I2C peripheral.
* @param I2C_EVENT: specifies the event to be checked.
* This parameter can be one of the following values:
* @arg I2C_EVENT_SLAVE_TRANSMITTER_ADDRESS_MATCHED : EV1
* @arg I2C_EVENT_SLAVE_RECEIVER_ADDRESS_MATCHED : EV1
* @arg I2C_EVENT_SLAVE_TRANSMITTER_SECONDADDRESS_MATCHED : EV1
* @arg I2C_EVENT_SLAVE_RECEIVER_SECONDADDRESS_MATCHED : EV1
* @arg I2C_EVENT_SLAVE_GENERALCALLADDRESS_MATCHED : EV1
* @arg I2C_EVENT_SLAVE_BYTE_RECEIVED : EV2
* @arg (I2C_EVENT_SLAVE_BYTE_RECEIVED | I2C_FLAG_DUALF) : EV2
* @arg (I2C_EVENT_SLAVE_BYTE_RECEIVED | I2C_FLAG_GENCALL) : EV2
* @arg I2C_EVENT_SLAVE_BYTE_TRANSMITTED : EV3
* @arg (I2C_EVENT_SLAVE_BYTE_TRANSMITTED | I2C_FLAG_DUALF) : EV3
* @arg (I2C_EVENT_SLAVE_BYTE_TRANSMITTED | I2C_FLAG_GENCALL) : EV3
* @arg I2C_EVENT_SLAVE_ACK_FAILURE : EV3_2
* @arg I2C_EVENT_SLAVE_STOP_DETECTED : EV4
* @arg I2C_EVENT_MASTER_MODE_SELECT : EV5
* @arg I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED : EV6
* @arg I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED : EV6
* @arg I2C_EVENT_MASTER_BYTE_RECEIVED : EV7
* @arg I2C_EVENT_MASTER_BYTE_TRANSMITTING : EV8
* @arg I2C_EVENT_MASTER_BYTE_TRANSMITTED : EV8_2
* @arg I2C_EVENT_MASTER_MODE_ADDRESS10 : EV9
*
* @note: For detailed description of Events, please refer to section
* I2C_Events in stm32f10x_i2c.h file.
*
* @retval An ErrorStatus enumeration value:
* - SUCCESS: Last event is equal to the I2C_EVENT
* - ERROR: Last event is different from the I2C_EVENT
*/
ErrorStatus I2C_CheckEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t lastevent = 0;
uint32_t flag1 = 0, flag2 = 0;
ErrorStatus status = ERROR;
/* Check the parameters */
assert_param(IS_I2C_ALL_PERIPH(I2Cx));
assert_param(IS_I2C_EVENT(I2C_EVENT));
/* Read the I2Cx status register */
flag1 = I2Cx->SR1;
flag2 = I2Cx->SR2;
flag2 = flag2 << 16;
/* Get the last event value from I2C status register */
lastevent = (flag1 | flag2) & FLAG_Mask;
/* Check whether the last event contains the I2C_EVENT */
if ((lastevent & I2C_EVENT) == I2C_EVENT)
{
/* SUCCESS: last event is equal to I2C_EVENT */
status = SUCCESS;
}
else
{
/* ERROR: last event is different from I2C_EVENT */
status = ERROR;
}
/* Return status */
return status;
}
函数 I2C_ GetFlagStatus
Table 246. 函数 I2C_ GetFlagStatus
| 函数名 | I2C_ GetFlagStatus |
|---|---|
| 函数原形 | FlagStatus I2C_GetFlagStatus(I2C_TypeDef* I2Cx, u32 I2C_FLAG) |
| 功能描述 | 检查指定的 I2C 标志位设置与否 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | I2C_FLAG:待检查的 I2C 标志位 参阅 Section:I2C_FLAG 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | I2C_FLAG 的新状态 1. |
| 先决条件 | 无 |
| 被调用函数 | 无 |
- 读取寄存器可能会清除某些标志位
I2C_FLAG
Table 247. 给出了所有可以被函数 I2C_ GetFlagStatus 检查的标志位列表
Table 247. I2C_FLAG 值
| I2C_FLAG | 描述 |
|---|---|
| I2C_FLAG_DUALF | 双标志位(从模式) |
| I2C_FLAG_SMBHOST | SMBus 主报头(从模式) |
| I2C_FLAG_SMBDEFAULT | SMBus 缺省报头(从模式) |
| I2C_FLAG_GENCALL | 广播报头标志位(从模式) |
| I2C_FLAG_TRA | 发送/接收标志位 |
| I2C_FLAG_BUSY | 总线忙标志位 |
| I2C_FLAG_MSL | 主/从标志位 |
| I2C_FLAG_SMBALERT | SMBus 报警标志位 |
| I2C_FLAG_TIMEOUT | 超时或者 Tlow 错误标志位 |
| I2C_FLAG_PECERR | 接收 PEC 错误标志位 |
| I2C_FLAG_OVR | 溢出/不足标志位(从模式) |
| I2C_FLAG_AF | 应答错误标志位 |
| I2C_FLAG_ARLO | 仲裁丢失标志位(主模式) |
| I2C_FLAG_BERR | 总线错误标志位 |
| I2C_FLAG_TXE | 数据寄存器空标志位(发送端) |
| I2C_FLAG_RXNE | 数据寄存器非空标志位(接收端) |
| I2C_FLAG_STOPF | 停止探测标志位(从模式) |
| I2C_FLAG_ADD10 | 10 位报头发送(主模式) |
| I2C_FLAG_BTF | 字传输完成标志位 |
| I2C_FLAG_ADDR | 地址发送标志位(主模式)“ADSL” 地址匹配标志位(从模式)“ENDAD” |
| I2C_FLAG_SB | 起始位标志位(主模式) |
注意:只有位[27:0]被函数 I2C_ GetFlagStatus 用来返回指定的标志位状态。值对应经计算的寄存器中的标志位位置,该寄存器包含 2 个 I2C 状态寄存器 I2C_SR1 和 I2C_SR2。
例:
/* Return the I2C_FLAG_AF flag state of I2C2 peripheral */
Flagstatus Status;
Status = I2C_GetFlagStatus(I2C2, I2C_FLAG_AF);
函数 I2C_ ClearFlag
Table 248. 函数 I2C_ ClearFlag
| 函数名 | I2C_ ClearFlag |
|---|---|
| 函数原形 | void I2C_ClearFlag(I2C_TypeDef* I2Cx, u32 I2C_FLAG) |
| 功能描述 | 清除 I2Cx 的待处理标志位 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | I2C_FLAG:待清除的 I2C 标志位参阅 Section:I2C_FLAG 查阅更多该参数允许取值范围 注意:标志位 DUALF, SMBHOST, SMBDEFAULT, GENCALL, TRA, BUSY,MSL, TXE 和 RXNE 不能被本函数清除 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
I2C_FLAG
Table 249. 给出了所有可以被函数 I2C_ ClearFlag 清除的标志位列表
Table 249. I2C_FLAG 值
| I2C_FLAG | 描述 |
|---|---|
| I2C_FLAG_SMBALERT | SMBus 报警标志位 |
| I2C_FLAG_TIMEOUT | 超时或者 Tlow 错误标志位 |
| I2C_FLAG_PECERR | 接收 PEC 错误标志位 |
| I2C_FLAG_OVR | 溢出/不足标志位(从模式) |
| I2C_FLAG_AF | 应答错误标志位 |
| I2C_FLAG_ARLO | 仲裁丢失标志位(主模式) |
| I2C_FLAG_BERR | 总线错误标志位 |
| I2C_FLAG_STOPF | 停止探测标志位(从模式) |
| I2C_FLAG_ADD10 | 10 位报头发送(主模式) |
| I2C_FLAG_BTF | 字传输完成标志位 |
| I2C_FLAG_ADDR | 地址发送标志位(主模式)“ADSL” 地址匹配标志位(从模式)“ENDAD” |
| I2C_FLAG_SB | 起始位标志位(主模式) |
例:
/* Clear the Stop detection flag on I2C2 */
I2C_ClearFlag(I2C2, I2C_FLAG_STOPF);
函数 I2C_ GetITStatus
Table 250. 函数 I2C_ GetITStatus
| 函数名 | I2C_ GetITStatus |
|---|---|
| 函数原形 | ITStatus I2C_GetITStatus(I2C_TypeDef* I2Cx, u32 I2C_IT) |
| 功能描述 | 检查指定的 I2C 中断发生与否 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | I2C_IT:待检查的 I2C 中断源 参阅 Section:I2C_IT 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | I2C_IT 的新状态(SET 或者 RESET)1. |
| 先决条件 | 无 |
| 被调用函数 | 无 |
- 读取寄存器可能会清除某些标志位
I2C_IT
Table 251. 给出了所有可以被函数 I2C_ GetITStatus 检查的中断标志位列表
Table 251. I2C_IT 值
| I2C_IT | 描述 |
|---|---|
| I2C_IT_SMBALERT | SMBus 报警标志位 |
| I2C_IT_TIMEOUT | 超时或者 Tlow 错误标志位 |
| I2C_IT_PECERR | 接收 PEC 错误标志位 |
| I2C_IT_OVR | 溢出/不足标志位(从模式) |
| I2C_IT_AF | 应答错误标志位 |
| I2C_IT_ARLO | 仲裁丢失标志位(主模式) |
| I2C_IT_BERR | 总线错误标志位 |
| I2C_IT_STOPF | 停止探测标志位(从模式) |
| I2C_IT_ADD10 | 10 位报头发送(主模式) |
| I2C_IT_BTF | 字传输完成标志位 |
| I2C_IT_ADDR | 地址发送标志位(主模式)“ADSL” 地址匹配标志位(从模式)“ENDAD” |
| I2C_IT_SB | 起始位标志位(主模式) |
例:
/* Return the I2C_IT_OVR flag state of I2C1 peripheral */
ITstatus Status;
Status = I2C_GetITStatus(I2C1, I2C_IT_OVR);
函数 I2C_ ClearITPendingBit
Table 252. 函数 I2C_ ClearITPendingBit
| 函数名 | I2C_ ClearITPendingBit |
|---|---|
| 函数原形 | void I2C_ClearITPendingBit(I2C_TypeDef* I2Cx, u32 I2C_IT) |
| 功能描述 | 清除 I2Cx 的中断待处理位 |
| 输入参数 1 | I2Cx:x 可以是 1 或者 2,来选择 I2C 外设 |
| 输入参数 2 | I2C_IT:待检查的 I2C 中断源 参阅 Section:I2C_IT 查阅更多该参数允许取值范围 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
I2C_IT
Table 253. I2C_IT 值
| I2C_IT | 描述 |
|---|---|
| I2C_IT_SMBALERT | SMBus 报警标志位 |
| I2C_IT_TIMEOUT | 超时或者 Tlow 错误标志位 |
| I2C_IT_PECERR | 接收 PEC 错误标志位 |
| I2C_IT_OVR | 溢出/不足标志位(从模式) |
| I2C_IT_AF | 应答错误标志位 |
| I2C_IT_ARLO | 仲裁丢失标志位(主模式) |
| I2C_IT_BERR | 总线错误标志位 |
| I2C_IT_STOPF | 停止探测标志位(从模式) |
| I2C_IT_ADD10 | 10 位报头发送(主模式) |
| I2C_IT_BTF | 字传输完成标志位 |
| I2C_IT_ADDR | 地址发送标志位(主模式)“ADSL” 地址匹配标志位(从模式)“ENDAD” |
| I2C_IT_SB | 起始位标志位(主模式) |
例:
/* Clear the Timeout interrupt opending bit on I2C2 */
I2C_ClearITPendingBit(I2C2, I2C_IT_TIMEOUT);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号