
相机标定
3D视觉
3D点
![]()
X4不等于0时:
![]()
X4=0表示无穷远点
点的射影变换:
![]()
3D平面
无穷远平面:
![]()
点X在平面π上:
![]()
平面的射影变换:![]()
点->平面
3点确定一个平面
![]()
平面->点
3个平面确定一个交点
3D直线
连接两点A,B的直线的矩阵表示
对偶表示
关联
![]()

点,线,面关系
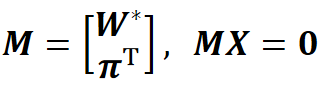
一个点X + 一条直线W确定一个平面π
直线W与平面π的交点为X
二次曲面
![]()
9个点确定一个二次曲面。
切平面:![]()
如果Q是奇异矩阵,也就是行列式为0,那么二次曲面是退化的。
射影变换
![]()
H的确定
对绝对二次曲面进行SVD分解,H就是U
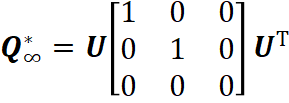
H=U
绝对二次曲线
Ω∞是无穷远平面π∞上的一条二次曲线。自由度为5
满足条件:

Ω∞的方程
![]()
绝对二次曲线是π∞上的纯虚圆。
射影变换
自由度为15
![]()
直线经过射影变换仍然是直线
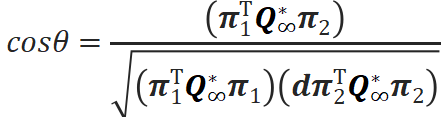
射影空间性质的度量(直线和无穷远平面度量)
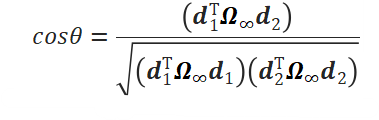
射影空间性质的度量(无穷远平面和绝对对偶二次曲面度量)
仿射变换
自由度为12
![]()
保持平面的平行性,体积比、形心不变。
一旦确定无穷远平面π∞,就能测量三维空间仿射性质。
相似变换
自由度为7,分别为一个缩放因子s,3个旋转角度确定的旋转矩阵R,3个坐标轴的平移量t。
![]()
保持角度不变、绝对二次曲线不变
欧式变换
自由度为6
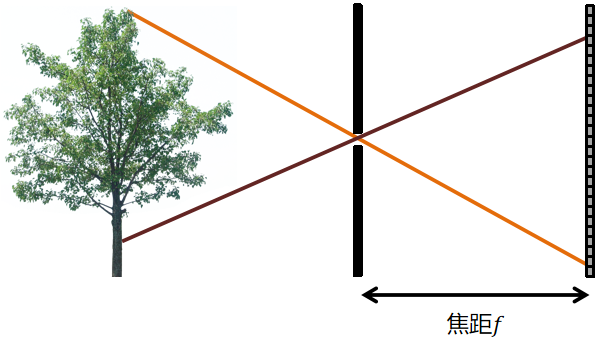
透相机 VS 针孔相机
相关术语

焦距越小,图像越小。

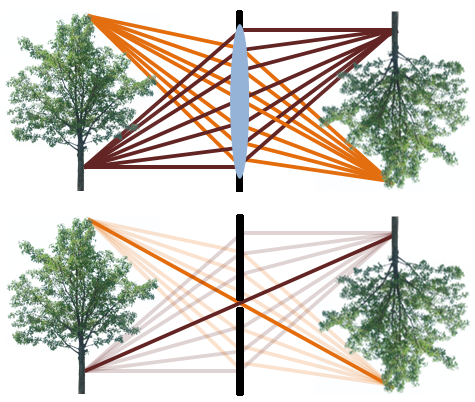
针孔越大,越模糊。

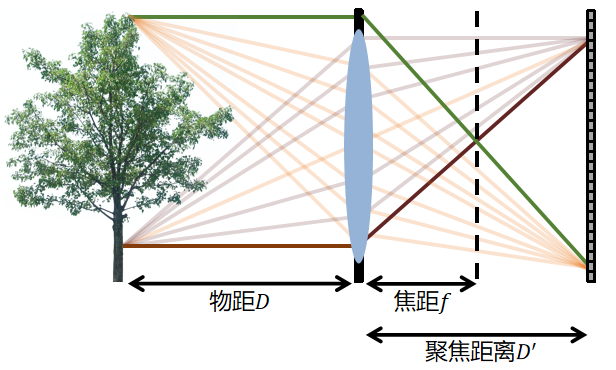
焦距
透镜相机中,焦距为平行光线相交的距离。
针孔相机中,焦距为针孔到传感器的距离。
成像过程
总的过程
世界坐标UVW -> 相机坐标XYZ -> 像平面坐标xy -> 像素坐标
世界坐标->相机坐标
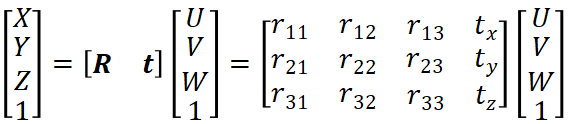
可以描述为:
![]()
RW控制旋转,tW控制平移。
平移
世界坐标点XW为世界坐标原点:
![]()

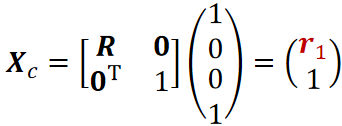
旋转
假设相机坐标系和世界坐标系的原点对齐:t=0
U轴上单位距离的点旋转:
![]()
V轴上单位距离的点旋转:
![]()
![]()
W轴上单位距离的点旋转:
![]()
![]()
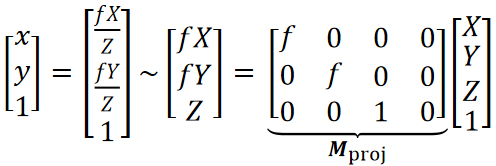
相机坐标 -> 图像坐标
图像坐标 -> 像素坐标
假设光心位置(u0,v0)
平移变换:

平移+缩放
纵轴分辨率为:k像素/cm。横轴分别率为:l像素/cm

仿射变换
纵轴分辨率为:k像素/cm。横轴分别率为:l像素/cm
偏斜角为Θ

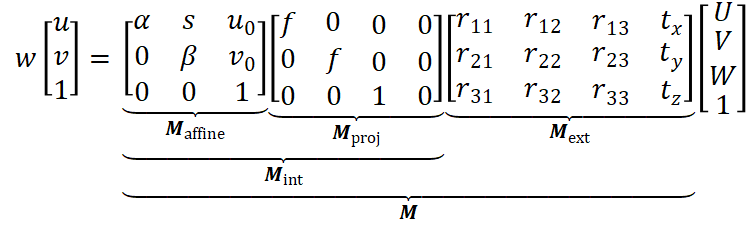
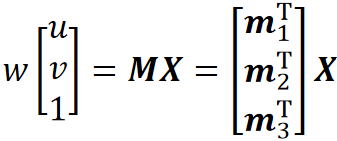
总的成像过程
相机标定
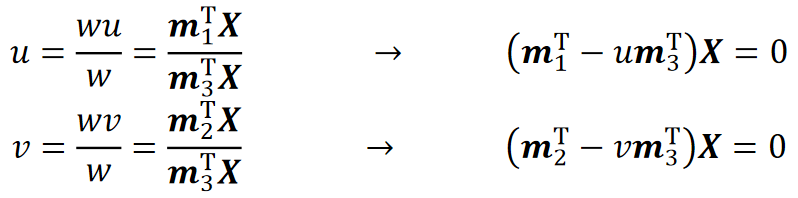
估计投影矩阵
给定N个世界坐标X1,...,XN以及他们对应像素的坐标x1,...,xN

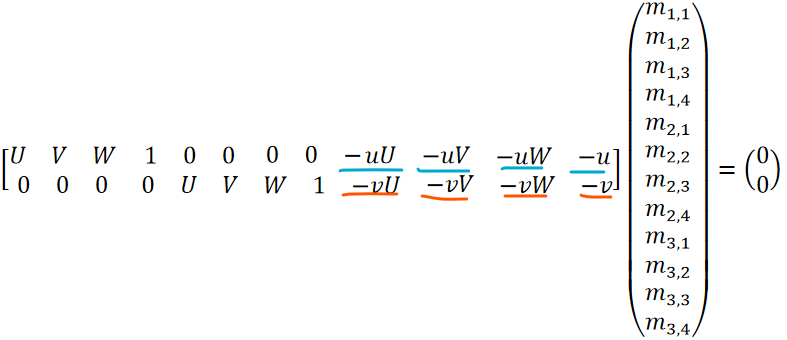
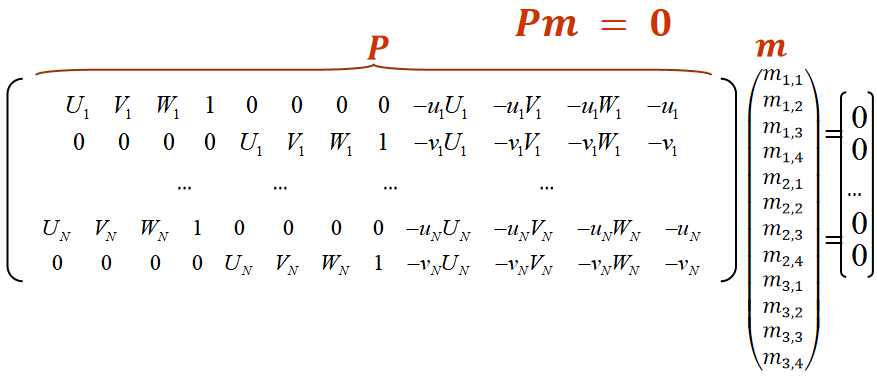
对P进行SVD分解,V的最后一列,也就是最小的特征值对应的特征向量为m
归一化DLT
对图像坐标进行归一化,平移到均值,缩放为√2
![]()
对空间坐标进行归一化,平移到均值,缩放为√3
![]()
然后采用归一化后的坐标计算DLT。
本文来自博客园,作者:Laplace蒜子,转载请注明原文链接:https://www.cnblogs.com/RedNoseBo/p/17456219.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号